 Caminante. Foto: Proyecto IIT / WALK-MAN
Caminante. Foto: Proyecto IIT / WALK-MANEn los últimos años, los ingenieros del Instituto Italiano de Tecnología (IIT) han estado trabajando para actualizar el robot
WALK-MAN (Locomoción y Manipulación Adaptativa de Cuerpo Entero). Esta máquina de tipo humanoide es similar al famoso robot
Atlas de Boston Dynamics. Pero se creó para asuntos más serios que mover mercancías en un almacén, para ayudar a las personas en accidentes tecnológicos, analizar escombros y extinguir incendios. Ella apareció por primera vez ante el público en junio de 2015 en el DARPA Robotics Challenge.
El trabajo es coordinado por un grupo de IIT, pero de hecho, científicos e ingenieros de muchas organizaciones de investigación y universidades en Europa participan. Gracias a la financiación de la Comisión Europea, WALK-MAN se ha convertido en un proyecto verdaderamente internacional: cada uno lleva a cabo su propia área y es responsable de un módulo o subsistema específico: desde simuladores de software hasta servoaccionamientos y manipuladores.
El proyecto WALK-MAN ha estado en curso durante cinco años. Ahora los ingenieros han llevado a cabo una importante actualización del robot, después de lo cual ha llegado el momento de las pruebas y demostraciones.
El primer modelo WALK-MAN parecía más voluminoso y torpe que una copia moderna. Pero incluso entonces era un auto poderoso.
El primer modelo es WALK-MAN. Foto: IITLuego, los desarrolladores observaron que todos los componentes son equipos 100% nuevos. Entre sus características principales se encuentra el uso de potentes motores especiales capaces de entregar varios kilovatios de potencia máxima a cada junta. El diseño del robot está diseñado para reducir la masa y mejorar las características dinámicas del robot, una gran cantidad de sensores monitorean la carga, la temperatura, el estado de los mecanismos y la electrónica.
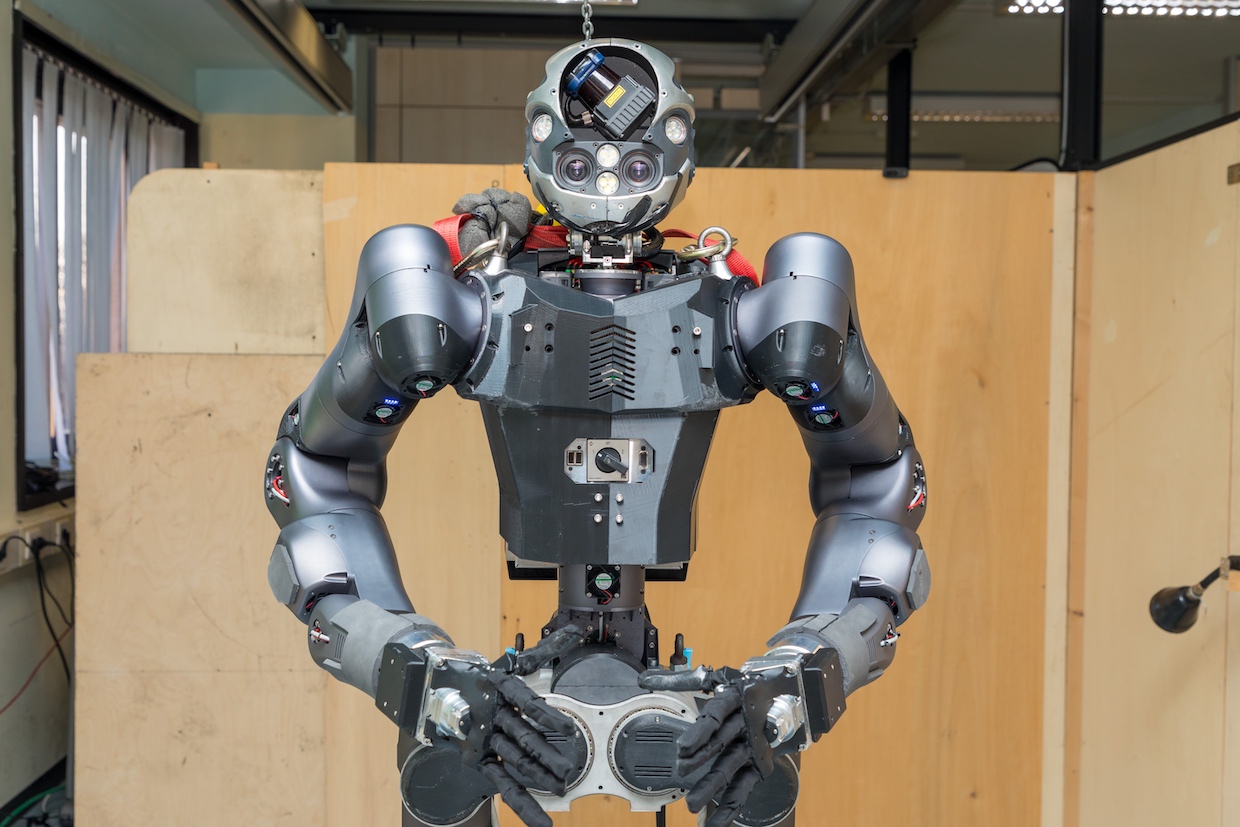
La nueva versión ha experimentado una modernización significativa. El robot recibió un cuerpo completamente nuevo hecho de aleaciones de aluminio y magnesio y titanio. Como resultado, fue posible perder peso de 133 kg a 102 kg.
Debido a la disminución de la masa, especialmente por encima del cinturón, el robot aumentó significativamente la dinámica, la agudeza de los movimientos y la capacidad de mantener el equilibrio; todas estas características son muy importantes, si es necesario, para actuar en el lugar de un desastre natural, catástrofe o accidente donde se planea utilizarlo. Se instalaron nuevas unidades de potencia en la parte superior del cuerpo e incluso con una batería más pequeña de 1 kWh, el robot puede funcionar de forma autónoma durante aproximadamente dos horas.
Las dimensiones del robot han disminuido tanto en ancho como en grosor, por lo que será más fácil para él pasar por aberturas estrechas en medio de los escombros y a lo largo de los corredores. Junto con ingenieros de la Universidad de Pisa, se desarrollaron nuevas "manos" biomórficas: manipuladores con 19 grados de libertad que capturan de forma segura una amplia variedad de objetos. Hay suficiente fuerza para transportar una carga de 10 kg durante más de 10 minutos (el modelo anterior levantó 7 kg).
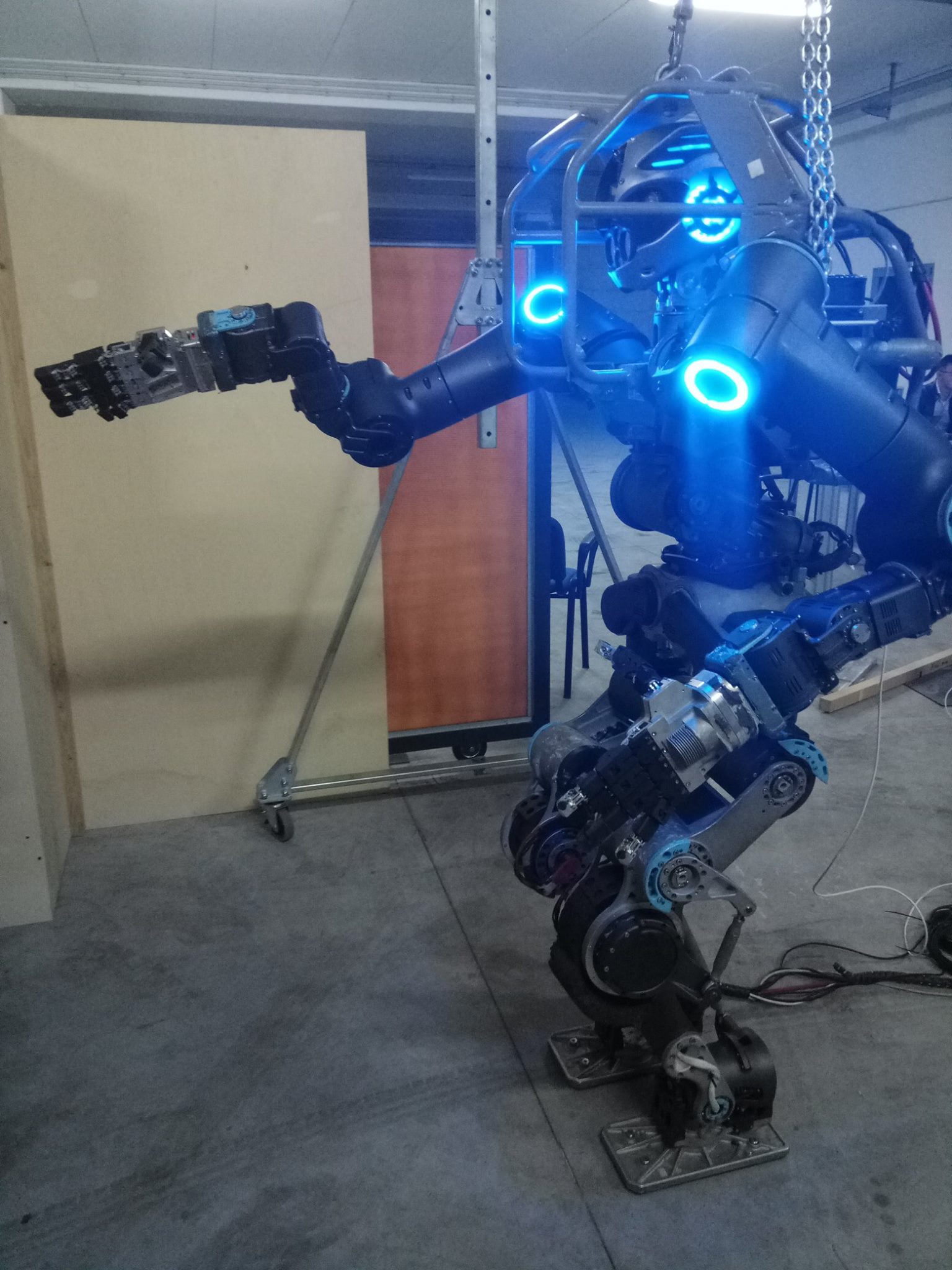
Como parte de una demostración preliminar, WALK-MAN participó en una simulación de operaciones de rescate en una planta industrial dañada por un terremoto, donde hay fugas de gas y un incendio. Es decir, en condiciones que son demasiado peligrosas para el trabajo humano, es en tales situaciones que es preferible el uso de robots. No importa cuánto cueste el automóvil, siempre será más barato que la vida humana.
El video muestra cómo el robot se mueve alrededor del edificio, gira la válvula, abre la puerta y enciende el extintor de incendios. Aproximadamente el 80% del tiempo el robot controla el robot: el piloto automático solo es responsable de ciertas funciones locales, como mantener el equilibrio, algunos movimientos corporales, etc.
Los desarrolladores notan una mejora significativa en el software y la potencia de la computadora. Ahora WALK-MAN puede usar módulos de control confiables de mayor complejidad en tiempo real.
Cabe señalar que la primera versión del robot en las competencias DRC 2015 no funcionó muy bien y superó solo 2 de los 8 obstáculos. Ahora se han solucionado muchos problemas: WALK-MAN se ha vuelto más fácil y más fuerte, por lo que ahora está mejor adaptado para trabajar en el entorno humano, se mueve más rápido y más estable, consume menos energía y realiza movimientos coordinados más complejos. Las principales tareas a las que se enfrentarán los diseñadores en el futuro cercano son un aumento gradual de la autonomía y una mayor velocidad de trabajo, incluida una marcha más rápida. Como se muestra en el video, ahora WALK-MAN, a pesar de su nombre, todavía se mueve muy lentamente.