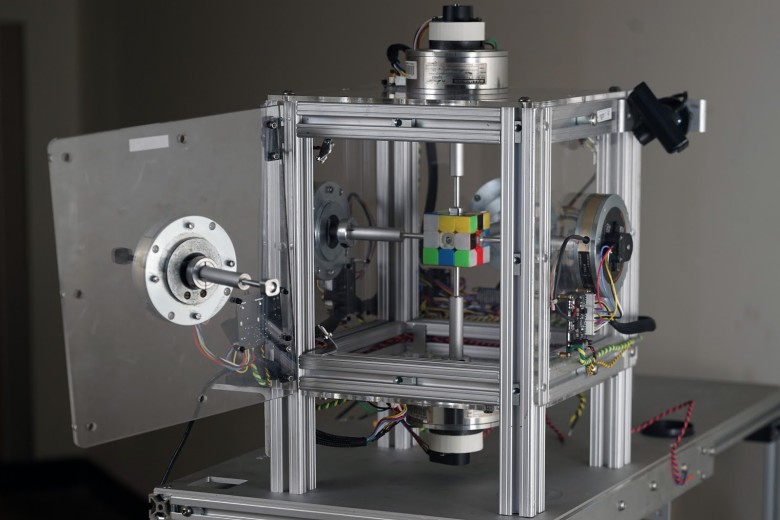
 Robot récord desarrollado en el Laboratorio de Robótica Biomimética del Instituto Tecnológico de Massachusetts
Robot récord desarrollado en el Laboratorio de Robótica Biomimética del Instituto Tecnológico de MassachusettsHay juegos en los que la IA derrota a una persona. Pero hay tareas en las que una persona generalmente no se considera competidora. Aquí, los robots compiten solo entre sí. Ensamblar un cubo de Rubik es una tarea típica.
En noviembre de 2016, el robot Infineon Technologies AG estableció un nuevo récord mundial para ensamblar el Cubo de Rubik: lo
ensambló en 0.637 segundos , rompiendo el récord anterior de 0.89 s. Pero los ingenieros europeos fueron superados por los estudiantes
del Laboratorio de Robótica Biomimética del Instituto Tecnológico de Massachusetts. Su robot completó la tarea en
unos increíbles 0,38 segundos . Este es un tiempo "sucio", que incluye presionar la tecla "Inicio", reconocimiento de imágenes y calcular la secuencia de acciones. La parte mecánica de la tarea en sí tomó aproximadamente 335 milisegundos. Resolver un problema en un
programa basado en
min2phase y enviar instrucciones: 45 milisegundos.
El video en tiempo real fue filmado claramente no para ojos humanos. Para que los órganos sensoriales imperfectos de una persona puedan arreglar el proceso de ensamblaje y el cerebro humano lento para darse cuenta de lo que está sucediendo, es necesario ralentizar la reproducción de video al menos varias decenas de veces. A una velocidad de 0.03x del real, algo queda claro.
Los desarrolladores están seguros de que la máquina es bastante capaz de hacer frente más rápido, pero esto requiere una optimización cuidadosa de la sincronización de los movimientos mecánicos capturados en una cámara de alta velocidad. En el video a una velocidad de 0.03x (desaceleración de 33 veces), es notable que después de cada movimiento las caras de la inercia del cubo se mueven hacia adelante y hacia atrás antes de detenerse finalmente. Entonces, una rotación de 90 ° en realidad se completa en aproximadamente 10 milisegundos, pero el robot realiza el siguiente movimiento en 15 milisegundos. Es en esta parte que el proceso puede optimizarse significativamente. Pero el robot casi duplicó el récord mundial anterior casi dos veces, y debido a errores de optimización, se rompió un cubo o explotaron los transistores de efecto de campo. Así que decidimos dejarlo como está. Pero si es necesario, los estudiantes pueden "cortar" otros 100 milisegundos del registro.
El diseño utilizó los siguientes detalles:
- 6 motores Kollmorgen ServoDisc serie U9 (cuatro N9M4T con imanes de neodimio y dos UD9-E, tienen las mismas características y rendimiento). Dos de ellos fueron tomados de un antiguo proyecto de un brazo mecanizado , el resto fueron comprados a bajo precio en eBay. Un sensor óptico US Digital 2000, también con eBay, está conectado a cada motor. Aunque estos sensores proporcionan una resolución excesiva para este experimento, lograron comprarse por $ 14 cada uno, nuevo, lo cual es un excelente precio. Es cierto que para conectar los sensores a los motores, tuve que jugar un poco.

- 6 controladores de motor de 12 voltios diseñados a medida. Los controladores STM32F303K8 funcionan aquí. Las placas se ensamblan en transistores de 100 voltios. Pero por alguna razón, a 60 voltios, uno de ellos explotó dos veces cuando el cubo se atascó. Firmware para controladores .

La sincronización / coordinación de movimientos entre los seis controladores se lleva a cabo mediante una placa lógica simple (AND Board), que recibe una señal de cada motor sobre el inicio / final del movimiento y envía una señal sobre un arranque seguro al siguiente motor en la cola.

- 2 cámaras PlayStation Eye disparan tres caras cada una. El video se procesa a 187 FPS en Linux con una latencia muy baja en comparación con las cámaras web convencionales. Estas cámaras pudieron comprar por $ 7. Es cierto que había un problema con una clara diferencia entre los cuadrados rojos y naranjas, por lo que los estudiantes hicieron un poco de trampa y pintaron los cuadrados naranjas con pintura negra.
- 1 Cubo de Rubik. Uno de los mas baratos .
No fue en vano que los cubos se tomaron barato, porque durante el experimento se rompieron varias piezas (ver video). Los ingenieros escriben que uno de los trucos para que todo funcione bien es proporcionar una compresión realmente ajustada de todos los detalles del cubo. Si las partes se alejan unas de otras, entonces las partes externas pueden girar hacia afuera cuando intentas girar rápidamente los planos centrales.
Ensamblar un cubo bien desmontado generalmente requiere de 19 a 23 pasos. Algunas soluciones se suman más rápido que otras (la más rápida consta de 21 pasos). Entonces, si tienes suerte, la tarea se resolverá unos 30 milisegundos más rápido.