BigDog fue el primer robot de Boston Dynamics en ser ampliamente conocido. En muchos sentidos, fue él quien "hizo el nombre" de su empresa creadora. Un robot para los militares, abandonado por los militares, y el primer robot de Boston Dynamics, que los desarrolladores patearon a la cámara.
Ahora el proyecto ha terminado, pero se ha convertido en la base de los desarrollos posteriores de la compañía: Cheetah y New Spot, videos con los que rápidamente se volvió viral.
Hoy trataremos de entender el dispositivo BigDog a partir de las palabras de sus desarrolladores. Los autores publicaron el artículo original en 2008, pero aún no se ha traducido al ruso. Cuenta sobre los componentes principales del robot y los algoritmos que coordinan su marcha. El objetivo del proyecto BigDog es la creación de dispositivos independientes con patas con la capacidad de moverse sobre terreno irregular. Deben ser superiores a los vehículos con ruedas y orugas existentes. Un sistema ideal debe ir a donde una persona o animal pueda ir, correr durante horas y llevar peso en forma de su propio combustible y carga útil. Ella es lo suficientemente inteligente como para cruzar el terreno con mínima intervención y control humanos.
Creado por robots BigDog ayudó a dar varios pasos para lograr estos objetivos, aunque todavía queda mucho trabajo por delante.
BigDog tiene sistemas integrados que proporcionan energía, energía, recolección de datos ambientales, monitoreo y comunicación. La energía es suministrada por un ICE de dos tiempos refrigerado por agua, que proporciona aproximadamente 15 hp. Acciona una bomba que suministra aceite hidráulico a través de un sistema de filtros, colectores, baterías a los actuadores de las patas robóticas. Los actuadores son cilindros hidráulicos de baja fricción controlados por servoválvulas de dos etapas. Cada actuador tiene sensores que controlan la posición y la resistencia de la unión. Cada pata tiene 4 actuadores hidráulicos que alimentan las articulaciones. Un intercambiador de calor montado en el cuerpo de BigDog enfría el aceite, y un radiador enfría el motor para un funcionamiento estable.
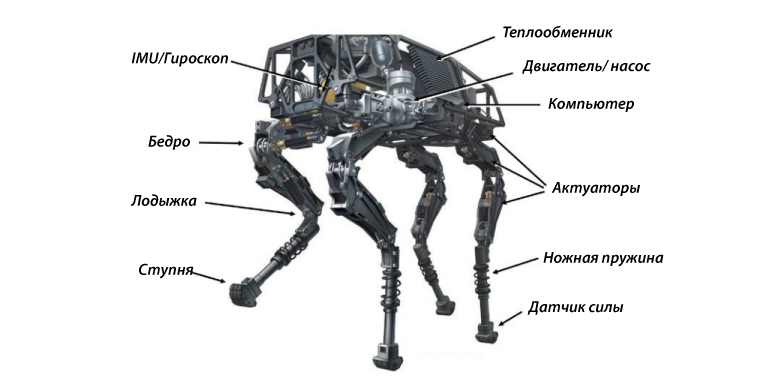 Elementos clave de diseño de BigDog
Elementos clave de diseño de BigDogLa computadora de a bordo controla el comportamiento de BigDog, controla los sensores y es responsable de la comunicación con el operador remoto. También registra una gran cantidad de datos de ingeniería para análisis de rendimiento, análisis de errores y soporte operativo.
BigDog tiene alrededor de 50 sensores. Los sensores inerciales miden la posición y la aceleración del cuerpo, los sensores articulares miden el movimiento y la fuerza de los actuadores articulares. La computadora a bordo procesa la información de todos estos sensores para dar una estimación de cómo se mueve el robot. Otro grupo de sensores controla la homeostasis de BigDog: presión hidráulica, flujos y temperatura, velocidad del motor, etc.
La computadora de a bordo realiza funciones de monitoreo de bajo y alto nivel. Un sistema de bajo nivel controla la posición de los servos y la nutrición en las articulaciones. Alto nivel coordina la posición de las piernas para regular la velocidad, la posición y la altura del cuerpo durante el movimiento. También rastrea el poder de la interacción con el suelo para garantizar un movimiento constante.
BigDog tiene muchas opciones de movimiento. Puede levantarse, agacharse, caminar con paso lento, caminar, levantar solo un pie a la vez, trotar y galopar. La velocidad con marcha lenta es de 0.2 m / s, para un lince - 1.6 m / s, para correr - 2 m / s (en condiciones de laboratorio, el indicador de velocidad máxima fue de 3.1 m / s). Además, el robot puede saltar 1.1 metros.
BigDog generalmente es controlado por un operador humano que trabaja con una unidad de control conectada al robot a través de radios IP. El operador proporciona un control de alto nivel de movimiento y velocidad. También puede ordenarle al robot que arranque o pare el motor, se pare, se siente, camine o salga a correr.
[Sobre cómo se desarrolló el algoritmo de navegación autónomo para el robot, puedes leer aquí ]Un sistema de visión estéreo y lidar se integraron en el robot. El sistema de visión estéreo desarrollado por Jet Propulsion Laboratory consta de un par de cámaras estéreo, una computadora y un software visual. Se utiliza para obtener una forma 3D del paisaje frente al robot y encontrar su camino. Se necesita Lidar para que BigDog pueda seguir a una persona sin comandos de operador adicionales.
Control de la marcha
Para moverse a velocidad humana, BigDog utiliza una marcha de trote equilibrada dinámicamente. Se equilibra usando la velocidad lateral y la aceleración, determinada por el comportamiento percibido de las piernas en combinación con sensores inerciales.
El sistema de control BigDog coordina la cinemática y las reacciones de tierra del robot, respondiendo a comandos posturales básicos. El controlador distribuye la carga entre las patas para optimizar su capacidad de carga. La carga vertical en las extremidades se mantiene lo más uniforme posible, y las piernas individuales generan reacciones basadas en el suelo dirigidas a las caderas para reducir la fricción.
El algoritmo de coordinación de la marcha responsable de la comunicación entre las extremidades desencadena el movimiento de las piernas. Está coordinado por un modelo de pierna virtual. El esquema general de control de paseo BigDog se puede representar de la siguiente manera:
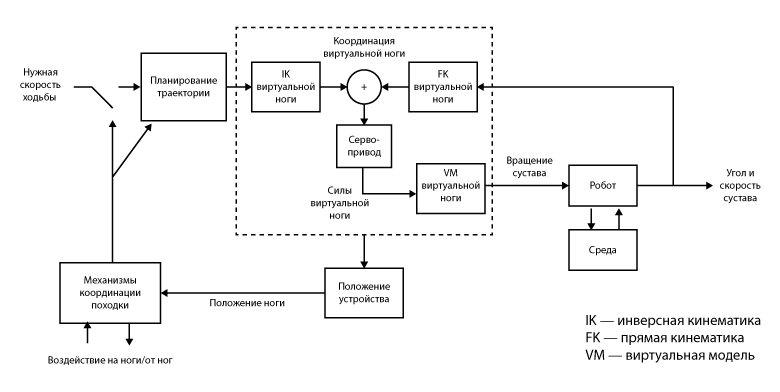 Patrón de control de marcha BigDog
Patrón de control de marcha BigDogDesarrollamos algoritmos de caminata para terrenos difíciles y los probamos en modelos físicos antes de probar en un robot. Un robot simulado camina a lo largo de pendientes en un ángulo de hasta 60 grados. El algoritmo de su movimiento varía dependiendo de si va en una superficie plana o en una pendiente. Además, tiene en cuenta obstáculos inesperados en el camino, como piedras o hoyos.
Se utilizó el modelado físico para desarrollar algoritmos de marcha.El sistema de control utiliza información del sensor articular para determinar si las "patas" están actualmente en el suelo y determinar la carga en cada extremidad y unidad. El algoritmo de estado controla la posición del cuerpo, coordinando la cinemática de las extremidades con las fuerzas de reacción de las piernas en contacto con el suelo. El algoritmo de estado implementa el movimiento correcto de las piernas en una superficie irregular. Esto le permite controlar los giros, los pasos y la altura del cuerpo en relación con el suelo, lo que le permite a BigDog adaptarse a los cambios del paisaje sin sensores de un mayor nivel de percepción del terreno.
BigDog se adapta al terreno de dos maneras. Regula la altura y la actitud del cuerpo hacia el paisaje y controla dónde colocar los pies. Al ascender y descender desde pendientes, el cuerpo del robot se inclina. Las pendientes pronunciadas (más de 45 grados) que supera el robot corrigiendo la marcha y utilizando pasos más pequeños.
Al final del artículo, los autores agradecen a las 23 personas del equipo de BigDog y comparten sus planes para el futuro: fortalecer el cuerpo del robot, hacer que BigDog sea autónomo y hacerlo más silencioso (el motor de gasolina hace ruido como una motocicleta). El último punto, como lo ha demostrado el tiempo, ha seguido siendo un problema grave.Más sobre robótica en robo-hunter.com: