Los círculos de robótica son definitivamente un éxito en estos días. Lego, arduino, rasguños y mucho más está disponible para los niños modernos (estoy seguro de que muchos, como yo, están celosos del niño actual en este sentido). Como profesor de robótica, decidí compartir algo de material que he acumulado durante un par de años de trabajo, a saber, un robot bastante simple y varias actividades con él.
Utilizo estas unidades en el aula para explicar a los niños los principios de funcionamiento del controlador del motor, el sensor de línea y el buscador de rango. Los niños que son superados por el estudio de este robot ya no han aprendido nada durante un año y tienen ideas mínimas sobre Arduino, los motores y la ingeniería eléctrica en general. Hay muchos proyectos en Internet con estos componentes, pero dos cosas me motivaron a desarrollar mi máquina: quería usar un compartimento para 4 baterías AA y poder conectar de forma segura casi cualquier sensor al robot (hay varios agujeros de montaje adicionales para esto en el diseño).

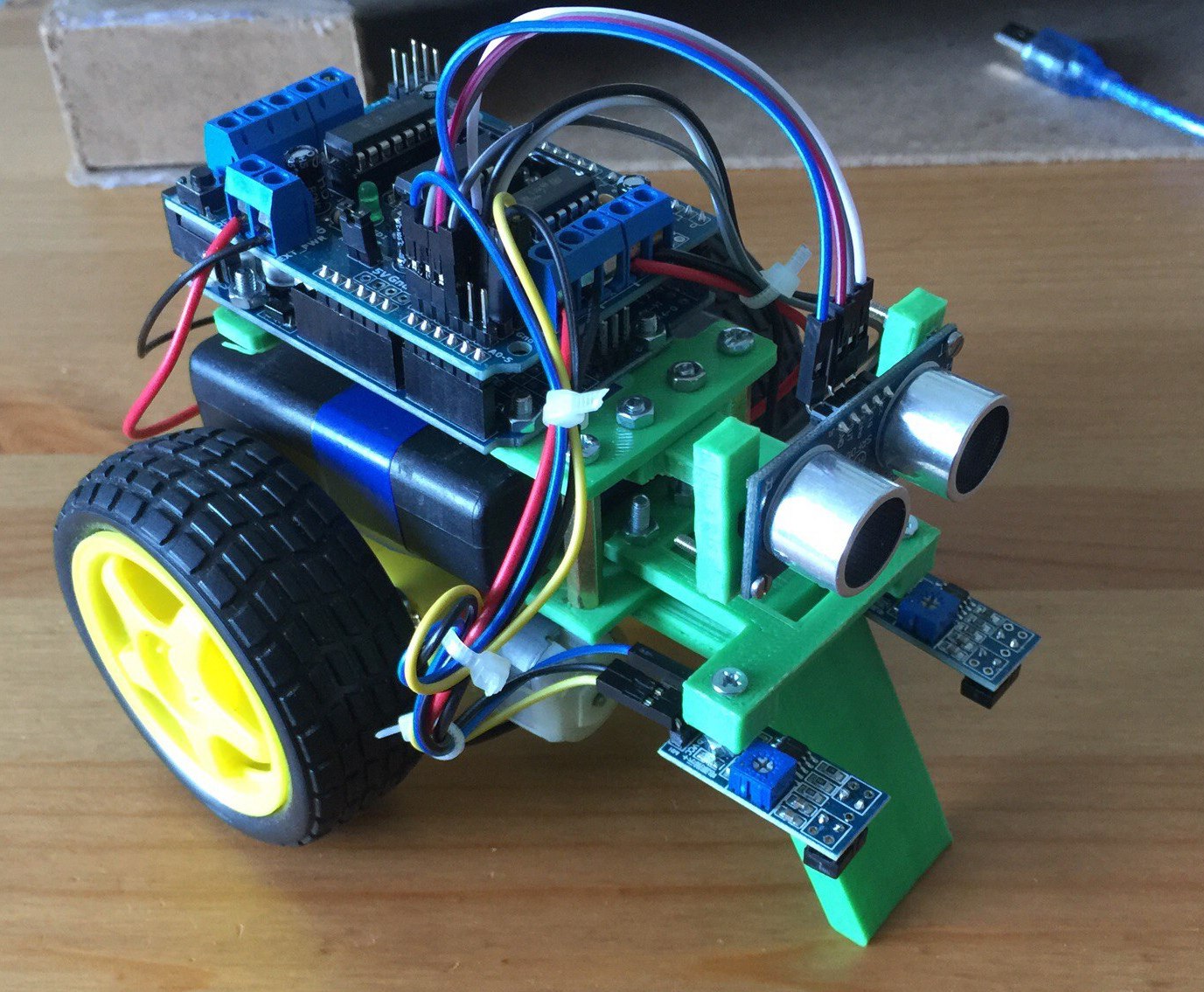
El robot está controlado por una placa Arduino Uno con motor shield l293d, desde los sensores que instalé el buscador de rango HC-SR04 y dos sensores de línea tcrt5000 (tiene salida digital y analógica).
El cuerpo del robot consta de 3 partes (sin contar los soportes opcionales para sensores), que se imprimen en una impresora 3D. Para el ensamblaje, necesitará sujetadores M3, describí todos los elementos necesarios en un documento que contiene archivos para una impresora 3D.
El robot está programado, tanto en el entorno Arduino IDE estándar (niños mayores) como en el programa miniBloq (para grupos más jóvenes). Para el entorno estándar, se utiliza la biblioteca AFMotor, que es necesaria para trabajar con el escudo de los controladores del motor. En miniBloq, para trabajar, debe seleccionar el equipo robot “ta-bot v1” utilizando el mismo controlador en la sección.
Con un buscador de rango y sensores de línea a bordo, el robot es adecuado para participar en competiciones en muchas disciplinas, pero fue creado solo para entrenamiento, no funcionará para ganar premios.
Clases que se pueden llevar a cabo con él:
- Trabaja con el conductor del motor. Rotación de las ruedas en diferentes direcciones y a diferentes velocidades.
- Maniobras simples. Montar en círculo, montar en una figura ocho (en estas clases, por regla general, debes elegir el tiempo y la velocidad necesarios muchas veces para obtener una figura dada).
- Sensor de línea El principio del trabajo. Transmisión de lecturas de sensores a una computadora (monitor de puerto).
- Montar en línea con un sensor de línea.
- Montar una línea con dos sensores de línea.
- Buscador de rango. El principio del telémetro. Transferencia del telémetro a la computadora.
- Paseando por la habitación con un telémetro. El robot avanza para encontrarse con un obstáculo, tan pronto como llega a la pared, gira.
- Busca al enemigo (como en robosumo). Dos robots se colocan en un círculo y comienzan a girar en su lugar, buscando al enemigo con un telémetro.
En la carpeta con los detalles también puede encontrar varias clases terminadas de la lista anterior.