Hola a todos, una vez vi que los submarinos con un largo alcance, una funcionalidad menos o menos tolerable y menos que el nuevo iPhone no están a la venta, y decidí hacerlo yo mismo.
Se controla a través de Internet, y ahora Internet móvil cubre una gran área de Rusia. Pequeños estanques están completamente cubiertos por él, y desde las costas de Internet hay incluso decenas de kilómetros de la costa.
Además, Elon Musk anunció la creación de una Internet mundial.
Decidí imprimir el barco en una impresora 3D, los modelos están hechos en compass_3d. El código está escrito en python 3.
Enlace a github .
Equipos y materiales.
• impresora 3d
• Computadora de placa única Raspberry pi
• módems 4g (2 piezas)
• computadora portátil (2 piezas 1º - transmisor, 2º - servidor)
• servomotores
• webcam
• motor
• Pb baterías
• otros (relés, soldadores, sensores, adhesivos, pinturas, selladores ...).
Detalles
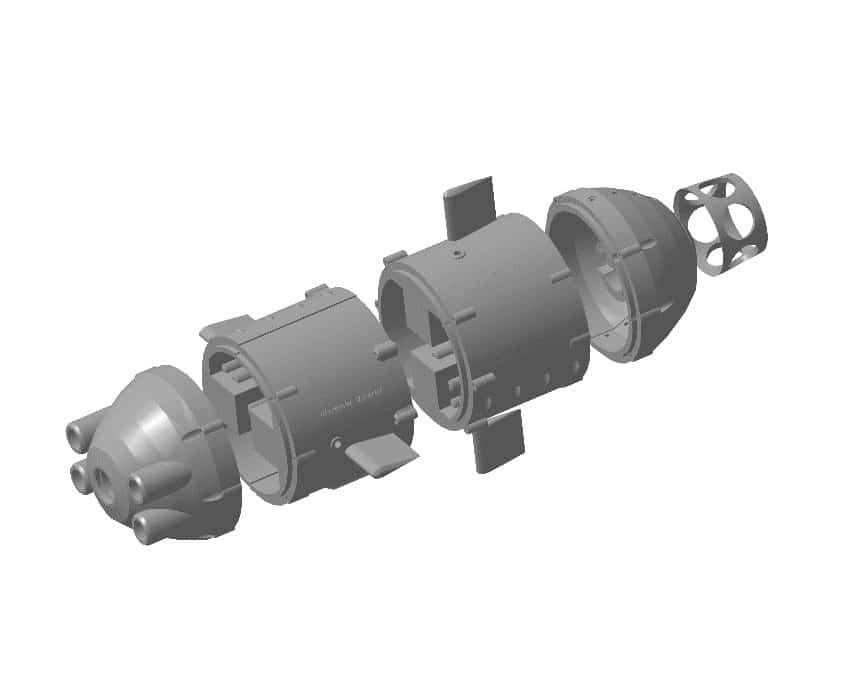
Como ya se mencionó, los detalles se imprimen en una impresora 3D con una capa de 0.3 mm con una boquilla de 0.4 mm
En una mesa de aluminio con un sustrato de pegamento bf2 para una mejor adhesión, los detalles más largos se imprimieron aproximadamente 14 horas. Dibujo de ensamblaje inferior.
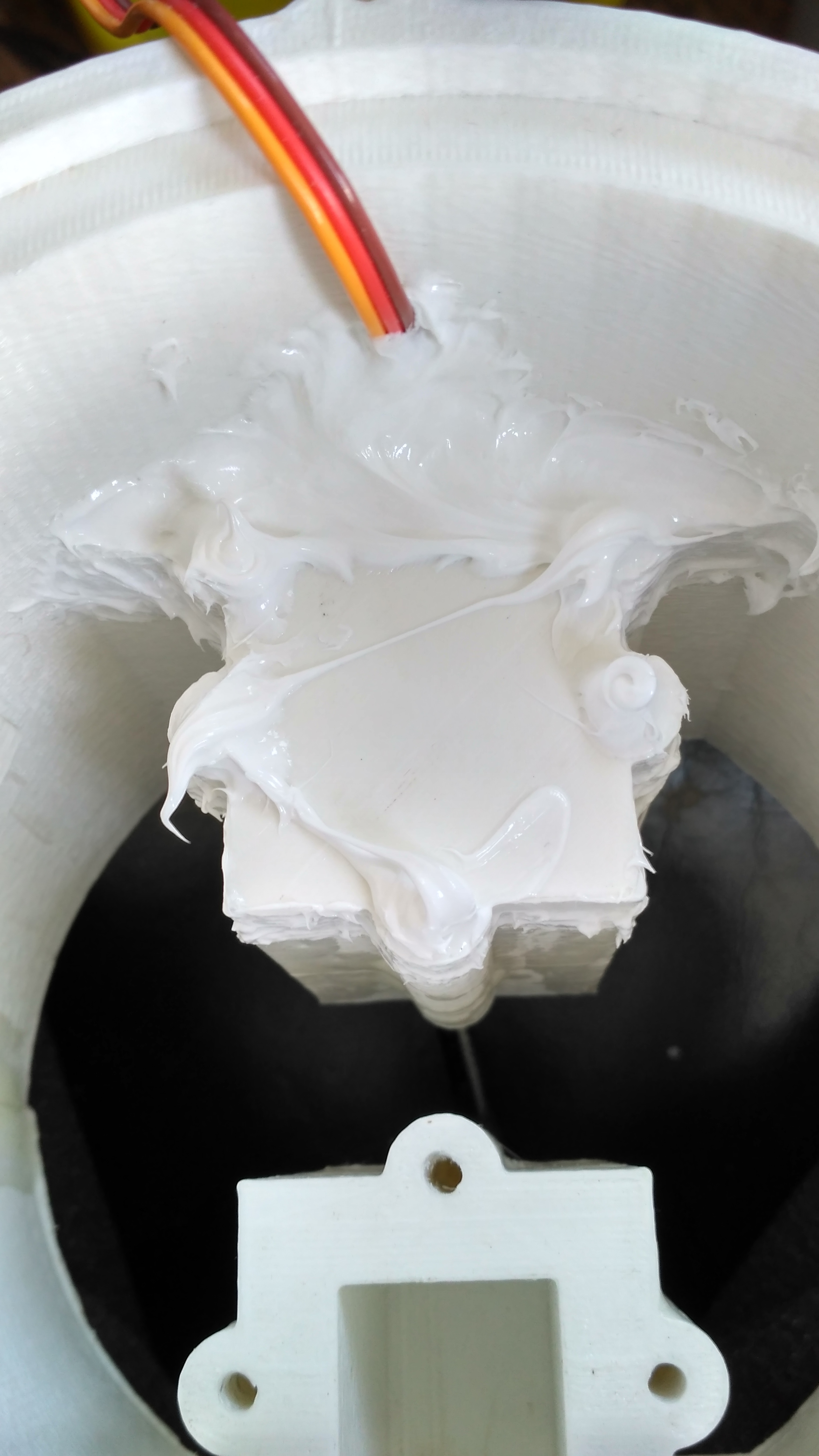
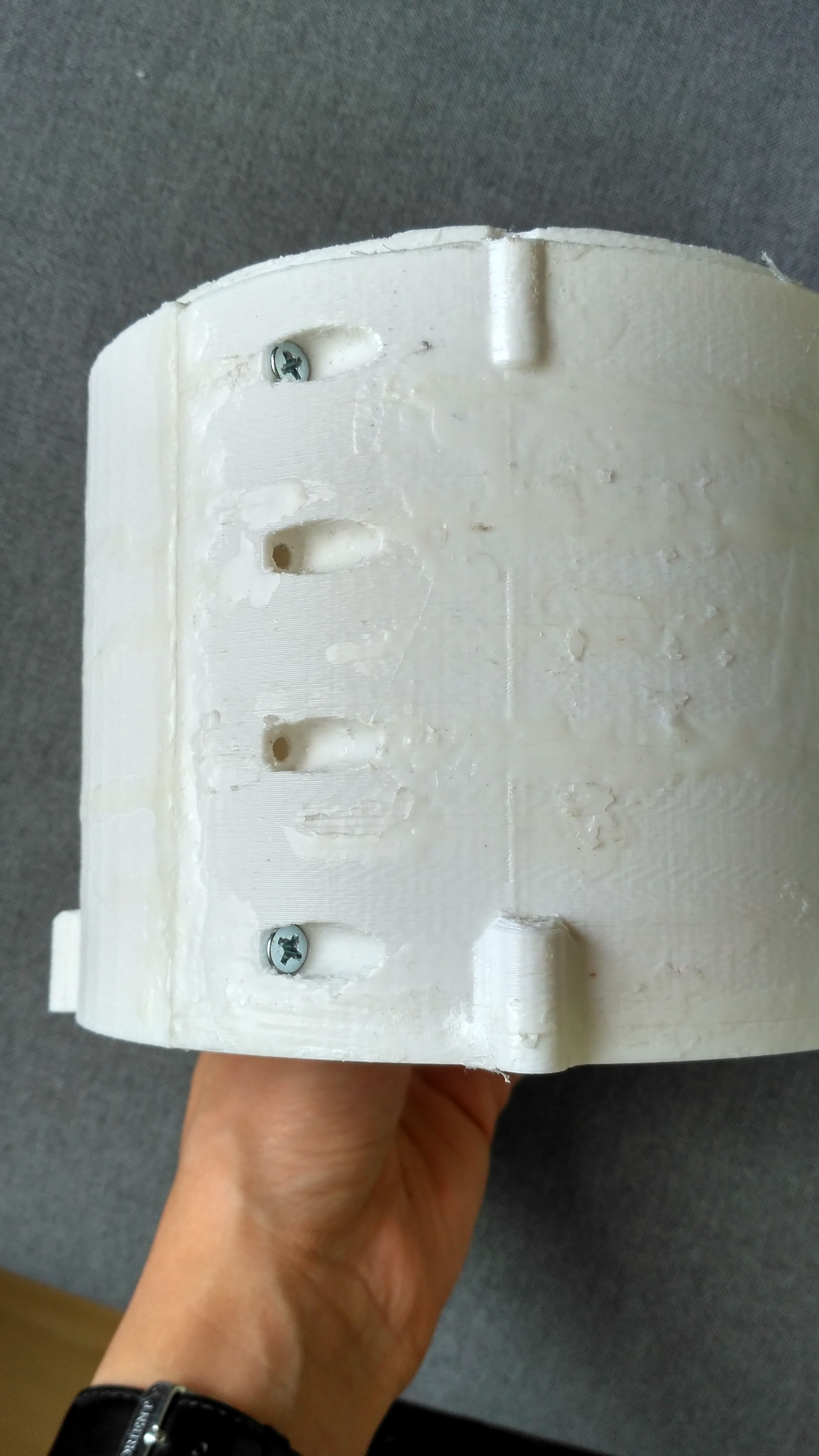
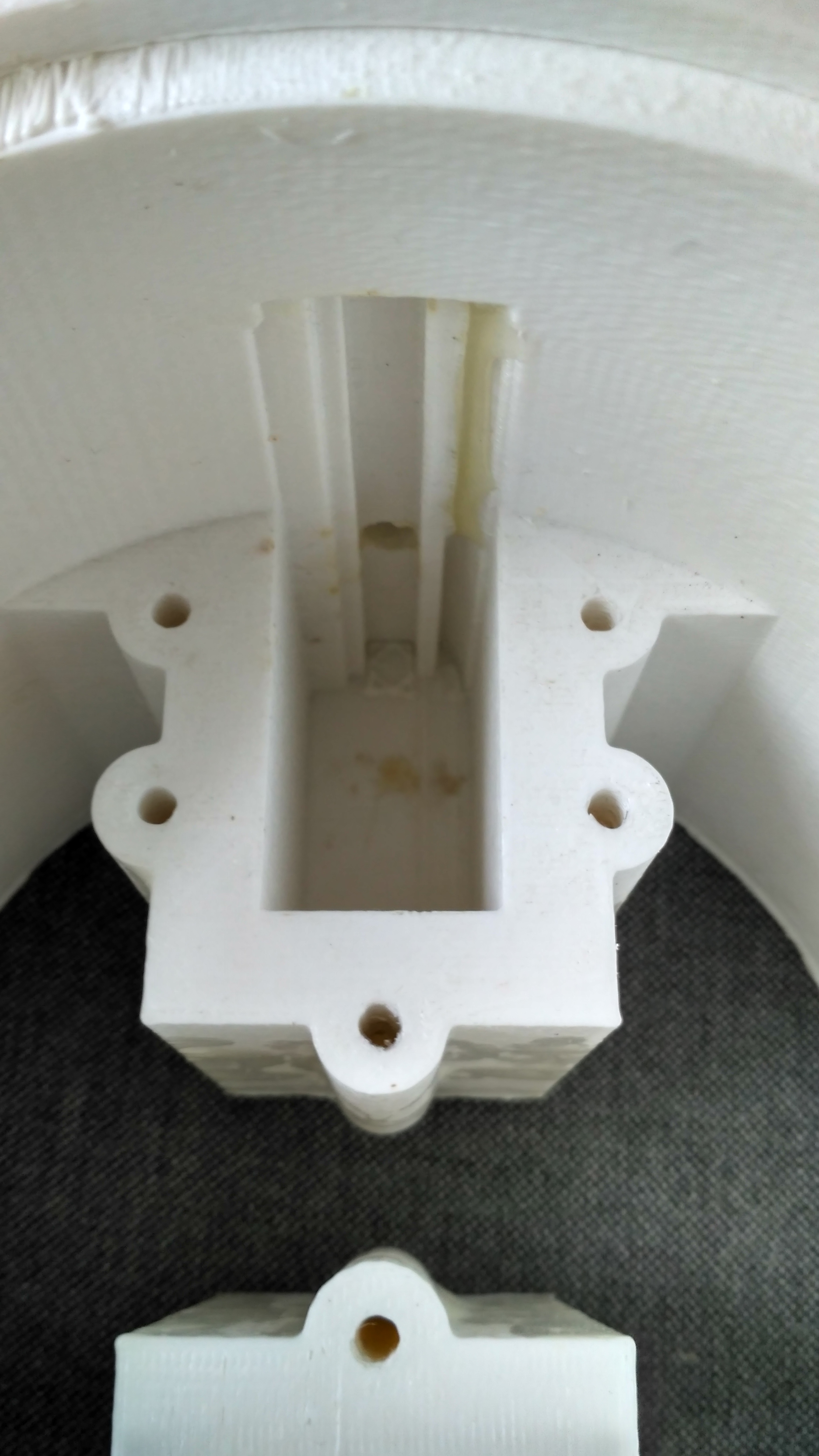
Estanqueidad
Para mayor estanqueidad, los servomotores y el motor BC principal están sellados con sellador de silicona y grasa. El bote en sí, debido al tamaño de sus partes y la tendencia del plástico abs a contraerse (cambiar el tamaño después de la impresión), en algunos lugares, estos lugares se agrietaron con pegamento para pvc, en lugares de juntas atornilladas, sellador de silicona para acuarios.
Nutrición
Como fuente de alimentación: dos baterías de plomo de plomo de 6 v conectadas en serie capaces de suministrar 3.3 AmH, las baterías de plomo se usan debido al hecho de que son más baratas, se deben llevar menos contactos de carga fuera del barco y también son pesadas (el barco es demasiado voluminoso y su promedio la densidad debe ser de aproximadamente 1000 kg / m ** 3).
Transferencia de datos
Ahora sobre lo principal, la transferencia de datos.
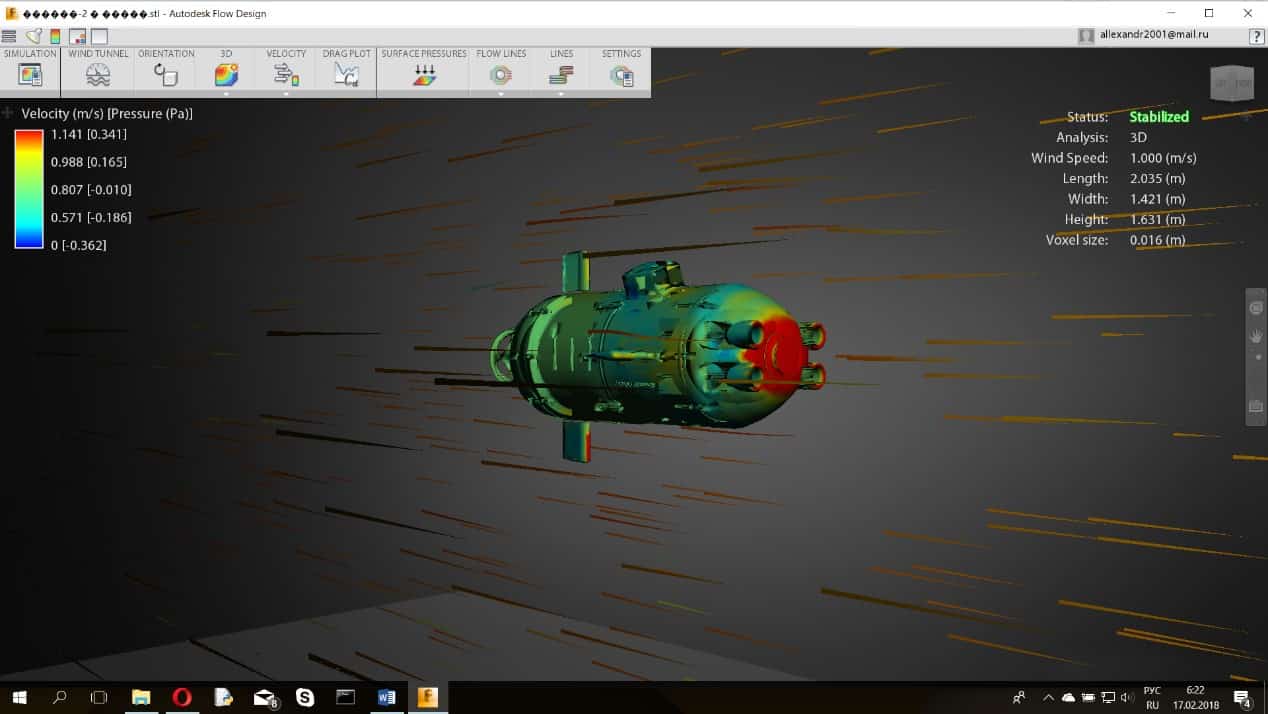
Como el agua absorbe EMV, el módem debe llevarse a la parte superior, de modo que la embarcación funcione con flotador.
En la red local, en casa, se instala un servidor que transfiere todo lo que llega de una dirección a otra. En este momento, el bote transmite el video y la computadora portátil controla el control. Todo esto está organizado a través de enchufes.
Como quería hacer todo lo posible para hacerlo más interesante
y reinventar la rueda , hice la transmisión de video yo mismo, como ya dije, así que sin inventar nada mejor, decidí no transferir el video, sino los cuadros en jpg. Se transmite una imagen, luego se envenena la palabra de detención "detener" y, dado que no aparece en jpg, el código separa fácilmente dónde y cuándo mostrar la imagen.
while bytes('stop','utf-8') not in data: image_result.write(data)
Reproducción de imágenes y recepción de la cámara con OpenCV. Todavía no hay compresión, por lo que el retraso es de 9-13 segundos. Los botones de control se escriben usando Tkinter.
Modelo de fondo 3D
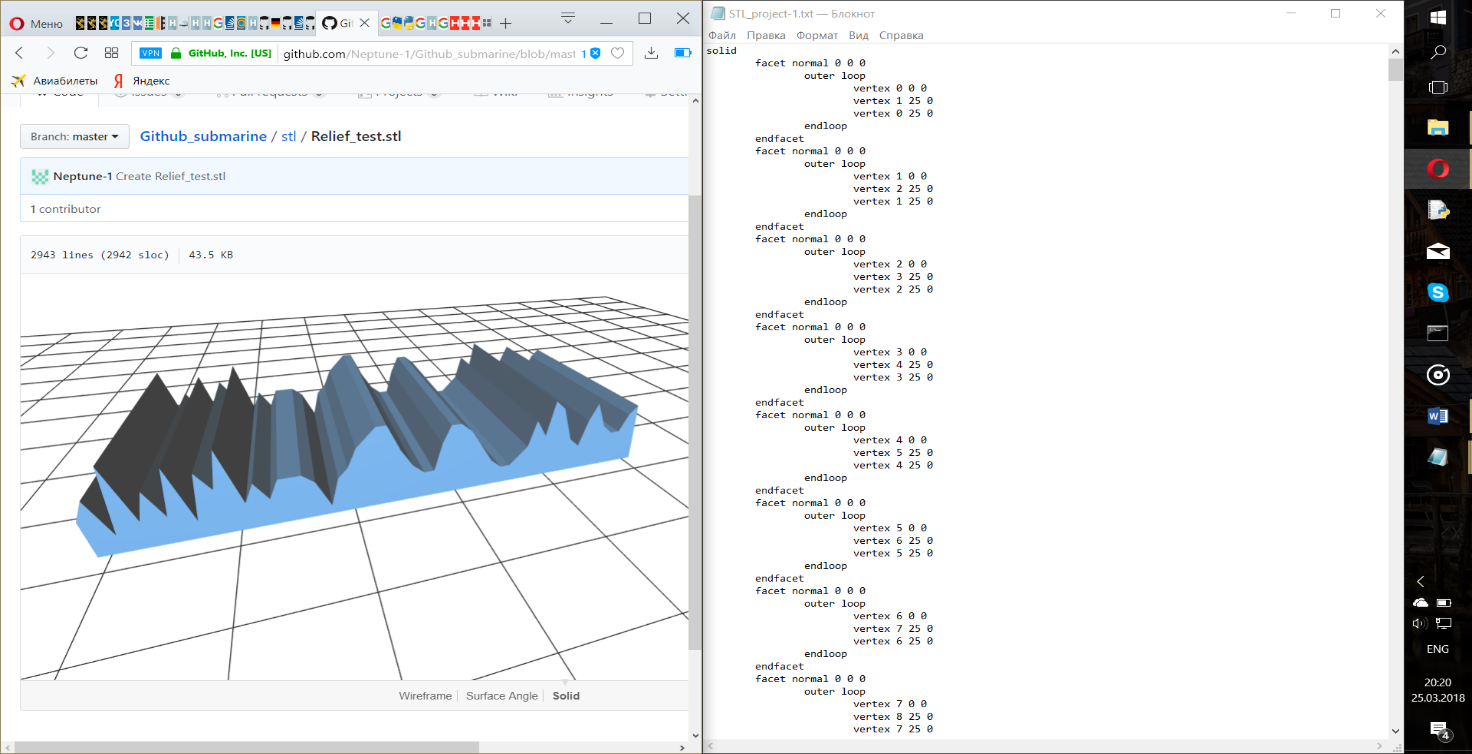
Mientras cargaba el modelo 3D en github, vi en qué consiste el archivo stl y decidí escribir el código para crear un modelo 3D de la topografía inferior a partir de la lista de distancias llevadas por un telémetro ultrasónico (que aún no se ha instalado).
Ejemplo de tetrahedron.stl en txtsolid
facet normal 0 0 0
outer loop
vertex 0 0 0
vertex 2 0 0
vertex 1 1 2
endloop
endfacet
facet normal 0 0 0
outer loop
vertex 2 0 0
vertex 1 2 0
vertex 1 1 2
endloop
endfacet
facet normal 0 0 0
outer loop
vertex 0 0 0
vertex 1 2 0
vertex 1 1 2
endloop
endfacet
facet normal 0 0 0
outer loop
vertex 0 0 0
vertex 1 2 0
vertex 2 0 0
endloop
endfacet
endsolid
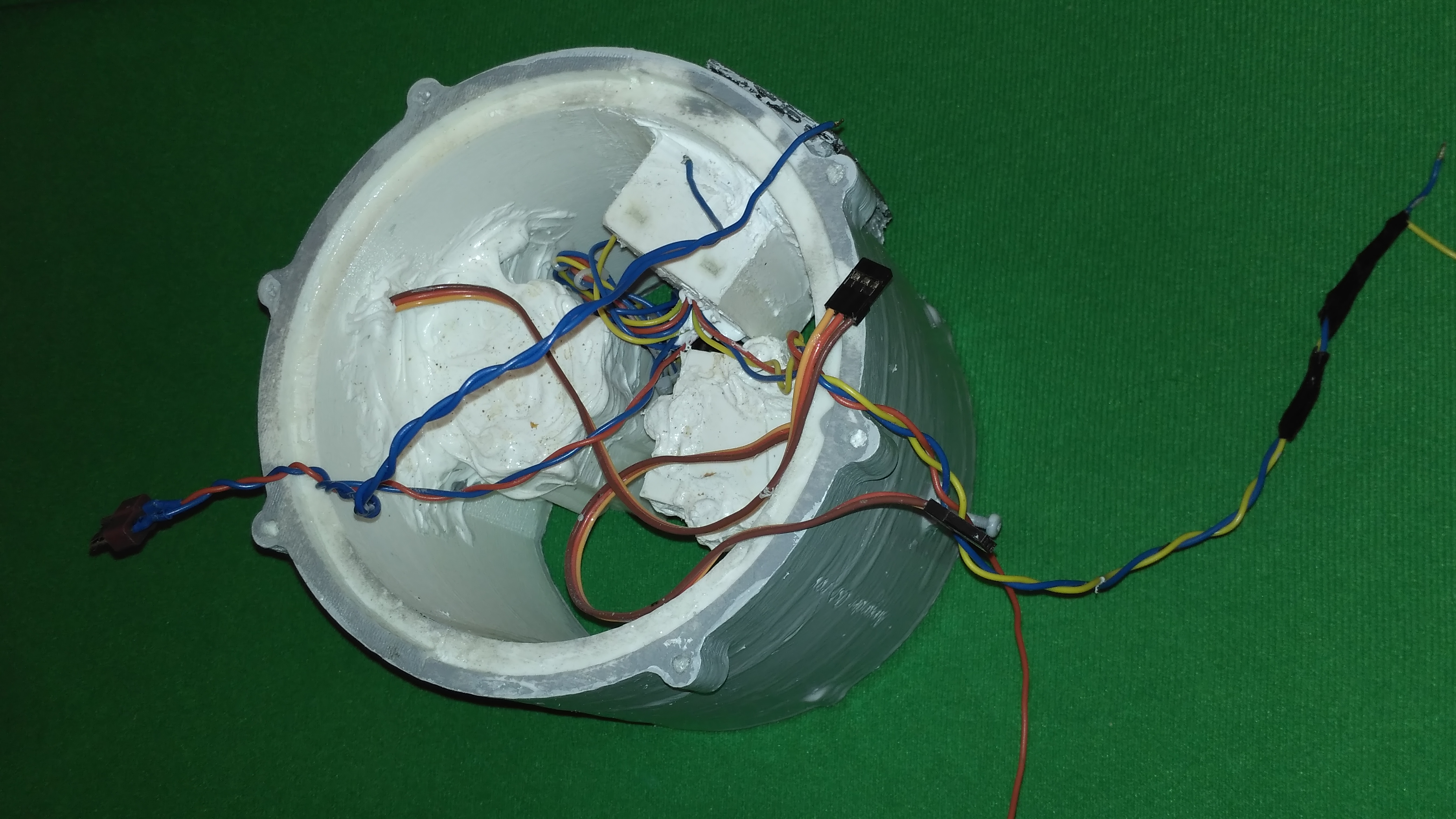
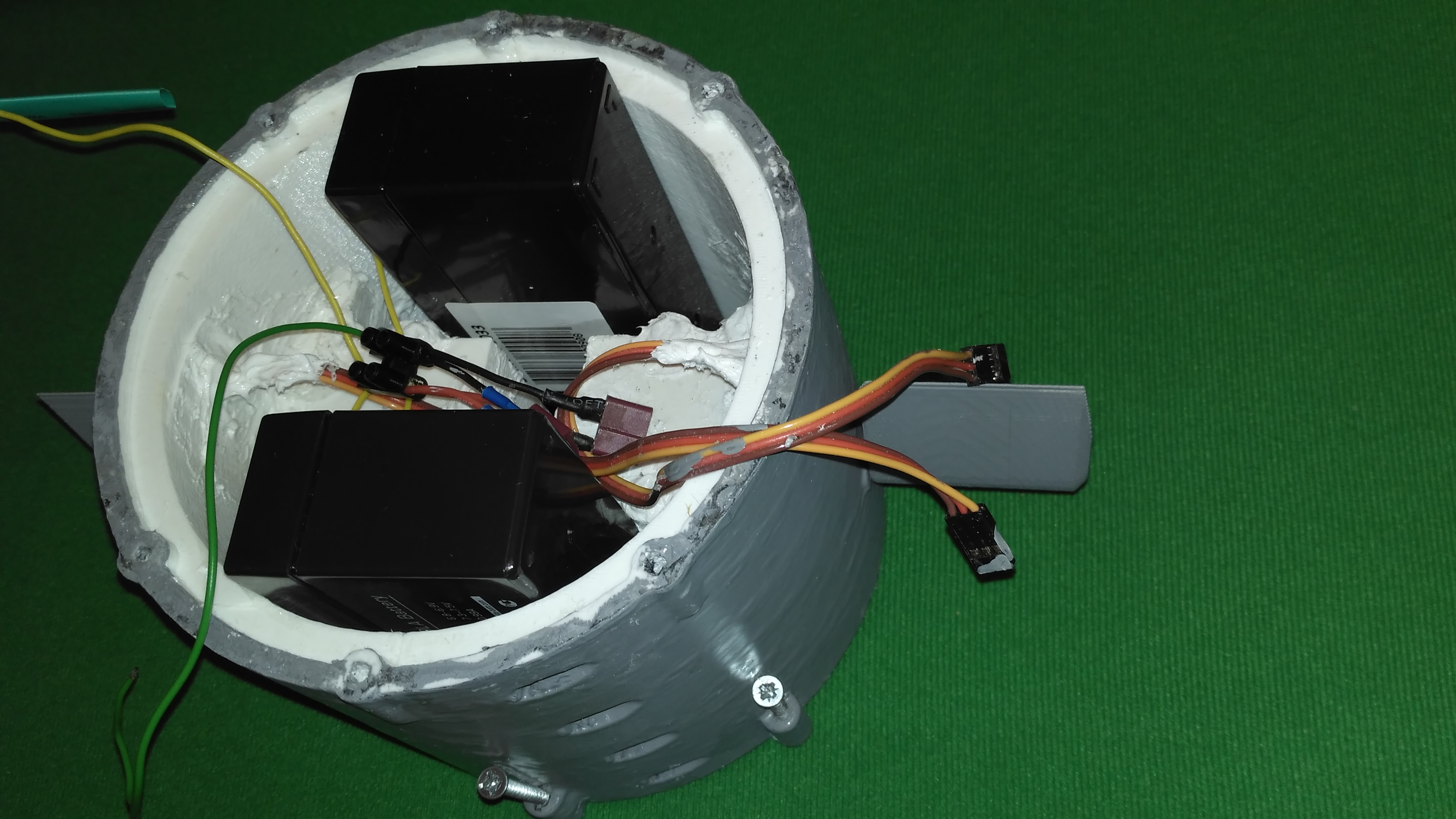
A continuación hay fotos interesantes y no muy




Resumen
En realidad, esto es todo lo que quería contar, mi idea principal que no entendí fue la creación de un aparato que permita recibir información debajo del agua a una gran distancia de la computadora portátil de control. Adiós, hasta el próximo artículo.