
Les traigo una lámpara, que al mismo tiempo es una ayuda visual "un agujero negro en un espacio bidimensional".
La teoría general de la relatividad de Einstein dice que los objetos con masa distorsionan el tejido del espacio-tiempo. Los agujeros negros son puntos de una densidad tan enorme que el espacio-tiempo en ellos está lo suficientemente distorsionado para que ni la radiación ni la materia puedan escapar.
Para recrear este fenómeno, tomé un trozo de elastano negro para imitar el "tejido del espacio-tiempo", y a su alrededor coloqué un "horizonte de eventos": un anillo de LED blancos; solo un poco más cerca del "agujero negro", y la luz no sale. Cuanto más tiempo mantenga la lámpara encendida, más crecerá el agujero negro, absorbiendo materia y energía. En nuestro modelo, para simular esto, el elastano tira de una línea trenzada, pasa a través de una tubería de cobre y se pone en movimiento mediante un motor eléctrico ubicado en la base. El controlador de brillo afecta simultáneamente la velocidad de la tensión: cuanto más luz y materia ingresan al agujero negro por unidad de tiempo, más rápido crece y viceversa. Si se apaga la lámpara, el motor gira en la dirección opuesta, aliviando la tensión, que es análoga a la evaporación de un agujero negro debido a la radiación de Hawking.
¿Es útil esta representación artística de un agujero negro en la escultura cinética con mecánica primitiva? Probablemente sí, en la misma medida que la historieta "Tim and Beat" sobre los pequeños hombres en la computadora. O la modelización de cualquier fenómeno físico con circuitos en amplificadores operacionales. Si quieres una historia más seria, aunque simplificada, sobre los agujeros negros, aquí tienes
este video en el canal de YouTube "En resumen".
Si desea ensamblar la misma lámpara, prepare:
- Tejido elástico negro como el elastano (también conocido como spandex, lycra, etc.)
- una tubería de cobre de media pulgada (una de plástico también es adecuada si no es un steampunker) y tres accesorios de esquina de 90 grados
- base de madera
- hilo de pesca trenzado
- aerosol con pintura negra
- Arduino Nano
- fuente de alimentación de 9 voltios
- tira de LED blanca hecha en casa, diferente de la estándar en que todos los LED están simplemente conectados en paralelo
- módulo con dos puentes en H con protección de corriente directa L9110
- Motor paso a paso 28BYJ
- interruptor de palanca
- resistencia variable
- alambres, soldadura, fundente, placa de pruebas
- herramientas para la instalación de radio y carpintería
Cortó tres piezas de tubería: dos de 330 mm y una de 368 mm.
Si lo desea, puede pulir así:

Taladre tres orificios de 16 mm: dos en un ángulo de aproximadamente 25 grados desde la vertical, para las tuberías a las que luego coloca el anillo LED, luego, retrocediendo a 25 mm de ellas, el orificio central para la tubería a través del cual pasará la línea de pesca.
Taladre dos agujeros más de los diámetros correspondientes para el interruptor de palanca y la resistencia variable. Otro agujero que se muestra en la foto del dispositivo terminado al final del artículo fue perforado erróneamente, no es necesario repetirlo.
Imprima
dos juegos de medios anillos
con un filamento negro y pegue cada uno de ellos. Para imprimir todo el anillo, el autor no tenía suficiente espacio en el escritorio de la impresora.
Corta un cuadrado de elastano y colócalo en un anillo delgado. Haga agujeros en la tela para 10 tornillos, luego, manteniéndolo ligeramente estirado, cubra con un anillo grueso y conecte el "emparedado" resultante con tornillos. Cortar el elastano sobrante.
Ate una cuenta con una línea de pesca trenzada al centro de la pieza de elastano.

Pegue la tira de LED alrededor del perímetro del anillo. Fije el anillo a los tubos cortos a través de accesorios. Suelde los cables a la cinta, marcándolos para que la polaridad sea clara, o tomando cables de colores y pase por uno de los tubos.
Pintar la base de negro. Coloque el accesorio en el tubo largo. Instale todos los tubos, el interruptor de palanca y la resistencia variable en los orificios provistos para ellos. Pase la línea a través de la tubería intermedia instalada en el medio.
Conecte los componentes de acuerdo con el diagrama adjunto.
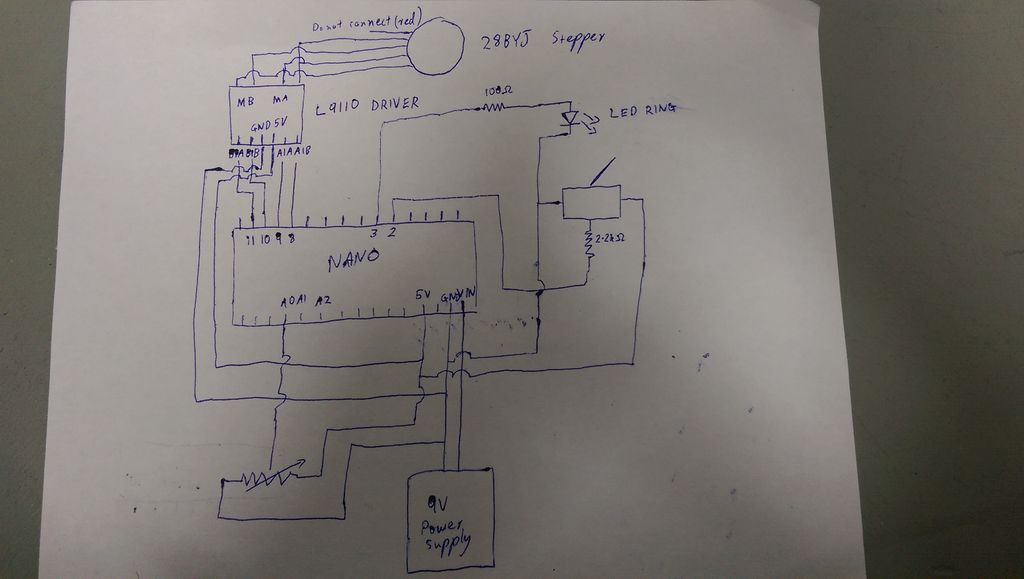
El motor paso a paso 28BYJ tiene cinco cables, pero uno de ellos, rojo, no necesita estar conectado a ningún lado. Conecte los cables naranja y rosa a la salida del módulo del puente H del motor B, y los cables amarillo y azul a la salida del motor A. Conecte el módulo al Arduino así:
B1A a D11
B1B a D10
A1A a D9
A1B a D8
Conecte la tira de LED (le recordaré, es de fabricación casera, y todos los LED están simplemente conectados en paralelo) a través de una resistencia de 100 ohmios entre la salida D3 (u otra salida con PWM, puede seleccionarla en el boceto) y el cable común. Conecte el interruptor de palanca de tal manera que conecte un cable común a través de la resistencia de 2.2 kOhm a la entrada D2 en la posición inferior, y la salida del estabilizador de cinco voltios en la posición superior. Es interesante por qué al autor no le gustan tanto las resistencias pull-up, esto permitiría el uso de interruptores sin contactos normalmente cerrados. Conecte uno de los terminales laterales de la resistencia variable al cable común, el otro a la salida del estabilizador de cinco voltios y el terminal central a la entrada A0.
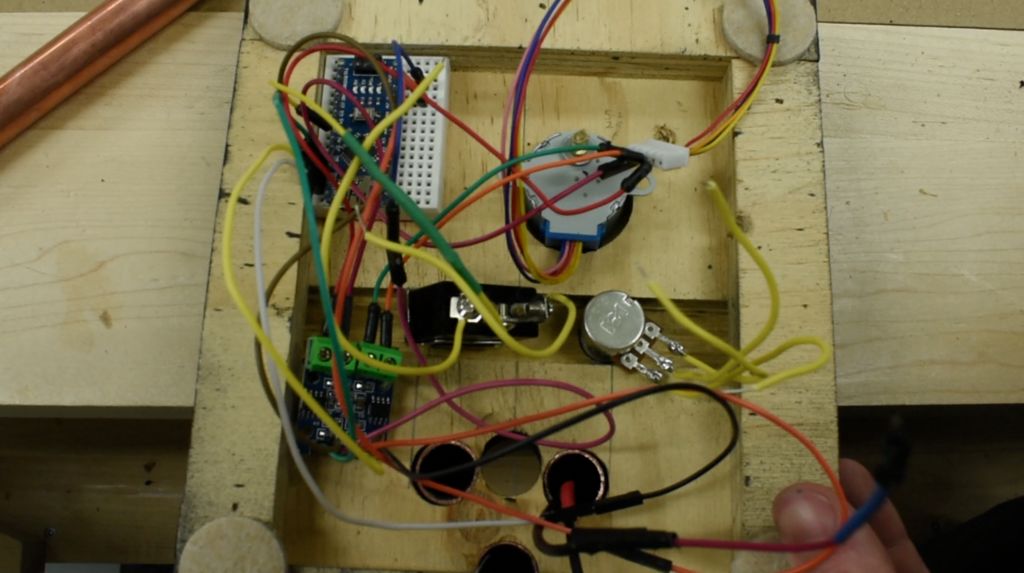
Imprima una polea del mismo conjunto de archivos STL, colóquela en el eje del motor y coloque el hilo de pescar. Entonces resultó algo como el que se muestra en la imagen.
Rellena el boceto:
//L9110 -> 28BYJ int A1A = 8; int A2A = 9; int B1B = 10; int B2B = 11; int PotPin = 0; // A0 int SwitchPin = 2; int LEDring = 3; // - int waitTime; // ( ) int PotVal; // int SwitchVal; int intensity; // float pulleyRadius = 1.4; // float maxStringContraction = 7.0; // , , float stepsPerRevolution = 2048.0; // float Pi = 3.14159; float circumference = 2.0 * Pi * pulleyRadius; float MaxRevs = maxStringContraction / circumference; // float MaxSteps = MaxRevs * stepsPerRevolution; // int StepLimit = MaxSteps; // int StepCount = 0; void setup() { Serial.begin(9600); //Serial.println(circumference); //Serial.println(MaxRevs); //Serial.println(MaxSteps); //Serial.println(StepLimit); pinMode(SwitchPin, INPUT); pinMode(LEDring, OUTPUT); pinMode(A1A, OUTPUT); pinMode(A2A, OUTPUT); pinMode(B1B, OUTPUT); pinMode(B2B, OUTPUT); } void step1() { digitalWrite(A1A, LOW); digitalWrite(A2A, HIGH); digitalWrite(B1B, HIGH); digitalWrite(B2B, LOW); delay(5); } void step2() { digitalWrite(A1A, LOW); digitalWrite(A2A, HIGH); digitalWrite(B1B, LOW); digitalWrite(B2B, HIGH); delay(5); } void step3() { digitalWrite(A1A, HIGH); digitalWrite(A2A, LOW); digitalWrite(B1B, LOW); digitalWrite(B2B, HIGH); delay(5); } void step4() { digitalWrite(A1A, HIGH); digitalWrite(A2A, LOW); digitalWrite(B1B, HIGH); digitalWrite(B2B, LOW); delay(5); } void Stop() { digitalWrite(A1A, LOW); digitalWrite(A2A, LOW); digitalWrite(B1B, LOW); digitalWrite(B2B, LOW); delay(5); } void BHgrowth() { analogWrite(LEDring, intensity); if (StepCount < StepLimit) { // step1(); step2(); step3(); step4(); StepCount += 1; } Stop(); } void HawkingRadiation() { analogWrite(LEDring, 0); if (StepCount > 0) { step3(); step2(); step1(); step4(); StepCount -= 1; } Stop(); } void loop() { PotVal = analogRead(PotVal); intensity = map(PotVal, 0, 1024, 0, 254); SwitchVal = digitalRead(SwitchPin); if (SwitchVal == 1) { BHgrowth(); waitTime = 255 - intensity; // , , if (waitTime < 1){ waitTime = 1; } } else { HawkingRadiation(); waitTime = 255; } delay(waitTime); Serial.println(waitTime); Serial.println(SwitchVal); }
¡Listo, puedes usarlo!