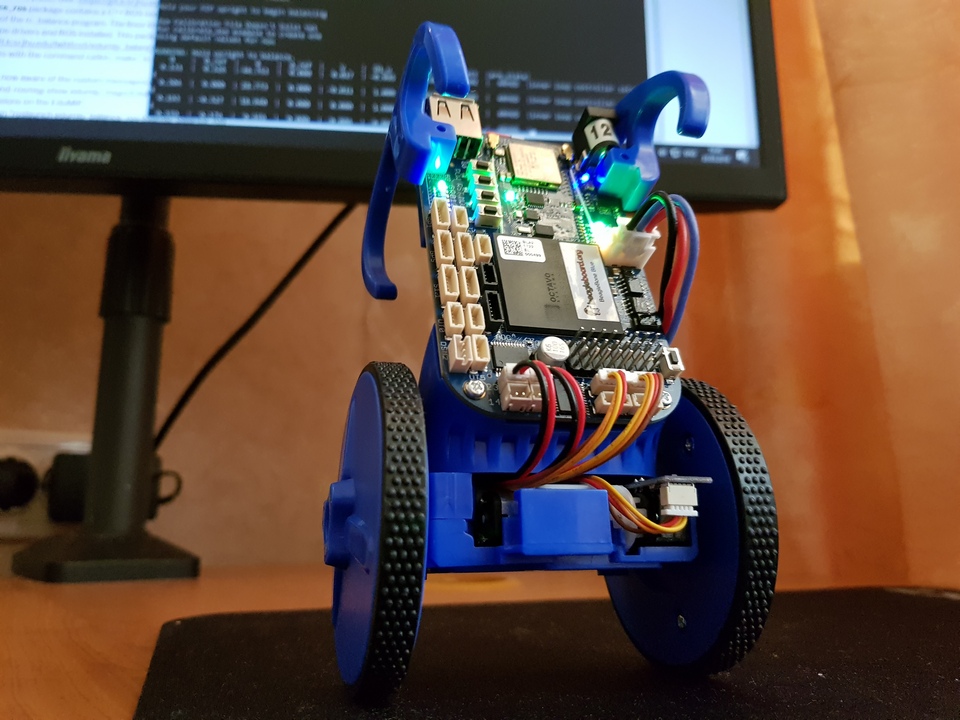
El robot puede mantener el equilibrio sobre dos ruedas, conducir bastante rápido. A bordo de Linux completo, hay wifi. Puede programar a través de la interfaz web. Hay instrucciones y fuentes para ejecutar ROS en él. En general, muchas oportunidades para la creatividad.
Hace tiempo que quería jugar con un robot con giroscopio, acelerómetro, brújula, y sí, para aprender ROS. No quería soldar y retocar nada como antes. Por lo tanto, BeagleBone tiene una PC de pago con una tarjeta de expansión incorporada para los robots BeagleBone Blue, que tiene los sensores y controladores de motor necesarios. Después de un tiempo, el kit para ensamblar el robot EduMip en los Estados Unidos se finalizó para él y escribieron instrucciones para lanzar ROS con las fuentes. En general, me prendí fuego.
Lo que se incluye en el kit:
- distancia entre ejes con motores / engranajes / ruedas / codificadores / cables
- LiPo de 2 celdas de 1400 mAh
- Cargador de 12 voltios
- Beagle hueso azul
EduMIP fue creado en el Laboratorio de Robótica COBINADO COORDINADO UC SAN DIEGO. Utilizado en cursos en línea, universidades y círculos de robótica.
EduMIP es una plataforma de aprendizaje:
- Modelado dinámico y control de retroalimentación de sistemas inestables.
- Planificación del movimiento del robot y prevención de colisiones.
- Control de motor DC a través de puentes H y codificadores.
- Evaluación de orientación a través de IMU y Barómetro.
- Comunicación a través de WiFi (802.11 b / g / n) y Bluetooth (4.1 / BLE).
- Carga, equilibrio, protección y monitoreo de la batería de celda LiPo 2 (incluida).
- Programación en C multiproceso y orientada a eventos en Debian Linux.
EduMIP es compatible con Python, ROS, MATLAB y Simulink, y LabVIEW.
El chasis EduMip fue desarrollado en colaboración con WowWee.
EduMIP es fácil de ampliar con la impresión 3D, hay una extensa biblioteca de software para millones de sensores estándar y dispositivos de comunicación a través de: USB, I2C, SPI, CAN, UART (GPS, DSM2), PWM (servos, ESC), GPIO, ADC.
De todos modos, tuve que comprar otro soldador para soldar los cables a los motores, por este dinero podríamos soldar de inmediato. El resto del kit es de bastante alta calidad y está bien embalado.
Recogido en una noche. Los motores y las ruedas son, en mi opinión, blandos. Me alegro de que no fuera necesario soldar prácticamente todos los componentes electrónicos en una sola placa. La batería se carga a través del tablero, desde el script puede ver el voltaje de la batería.
Una ventaja indudable para mí es que BedgleBone tiene wifi incorporado y Linux completo. Cloud9 IDE está disponible de inmediato y puede programar el robot por aire en python y otros lenguajes de programación. La placa tiene 4 gigabytes de memoria incorporados en los que Linux Debian ya está escrito, por lo que puede iniciar y programar sin una unidad flash. Solo para ROS, debe escribir la imagen en una tarjeta de memoria.
En la siguiente parte analizaré cómo programarlo, mientras estoy atascado en cómo instalar bibliotecas adicionales de este robot en Debian.