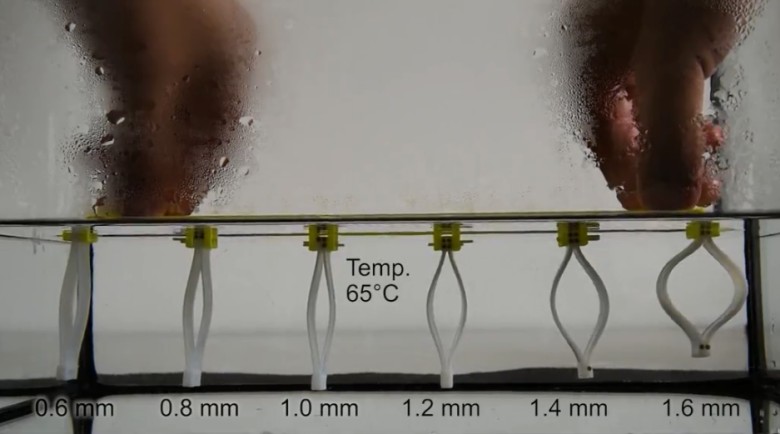
 La reacción de las tiras poliméricas flexibles a los cambios de temperatura depende de su grosor. Aquí se muestran tiras de 0,6 mm a 1,6 mm cuando se colocan en agua a 65 ° C. La velocidad de enderezamiento varía de 7 a 37 segundos, lo que le permite programar las acciones del robot en una secuencia determinada.
La reacción de las tiras poliméricas flexibles a los cambios de temperatura depende de su grosor. Aquí se muestran tiras de 0,6 mm a 1,6 mm cuando se colocan en agua a 65 ° C. La velocidad de enderezamiento varía de 7 a 37 segundos, lo que le permite programar las acciones del robot en una secuencia determinada.Los ingenieros del Instituto de Tecnología de California y sus colegas de la Escuela Técnica Superior Suiza de Zúrich
han creado robots que pueden moverse independientemente sin utilizar motores, servos o una fuente de energía. ¿Suena como una máquina de movimiento perpetuo? En realidad no El hecho es que cada par de remos o "músculos" es capaz de realizar
un solo movimiento de remos después de que el robot se sumerge en el agua. Pero lo más destacado es que los músculos y los remos pueden ser tantos como desee, y pueden funcionar a diferentes intervalos de tiempo, uno tras otro. Por lo tanto, puede preprogramar la trayectoria del robot, así como realizar diversas acciones, por ejemplo, descargar una carga seguido de una maniobra de evasión. La investigación fue financiada por la Oficina de Investigación del Ejército.
A pesar de la aparente simplicidad, estos son los primeros dispositivos de su tipo que utilizan la deformación del material para acciones programadas por temperatura en agua. El principio de funcionamiento se muestra en los
videos de demostración .
Lista de demos de video
- Un golpe La distancia recorrida desde un golpe corresponde aproximadamente a 1.15 de la longitud del robot.
- La reacción de los "músculos" a un cambio de temperatura depende del grosor de las bandas del polímero flexible. El video muestra rayas con un espesor de 0.6 mm a 1.6 mm cuando se coloca en agua a 65 ° C. La velocidad de enderezamiento varía de 7 a 37 segundos.
- Movimiento de un robot remero con dos pares de remos . La secuencia de golpes está regulada por el grosor de los músculos en el primer y segundo par de remos. La distancia recorrida desde el doble golpe es aproximadamente 1.9 veces la longitud del robot.
- Movimiento con giro a la izquierda . El primer par de remos mueve el robot hacia adelante aproximadamente 0.5 de su cuerpo, y el remo de la segunda etapa gira el cuerpo aproximadamente 21.45 °.
- Movimiento con dos vueltas . Después del primer golpe, el robot gira aproximadamente 21.64 ° hacia la izquierda, y después del segundo golpe, gira aproximadamente 21.45 ° hacia la derecha.
- Músculos hechos de otro material que se expanden a una temperatura diferente de 40 ° C. El video muestra que el material anterior no responde a esta temperatura. Por lo tanto, los científicos pueden programar el robot para varios movimientos dependiendo de la temperatura ambiente.
- Un ejemplo de un algoritmo complejo . El robot nada la distancia establecida, deja caer la carga y luego se aleja flotando en la dirección opuesta. La primera condición es proporcionada por tiras de polímeros más delgadas que se disparan antes. La carga está asegurada por tiras gruesas que reaccionan más tarde y liberan la carga después de que el robot haya navegado la distancia programada.
- El mecanismo interno del actuador muestra cómo el músculo presiona y transfiere el mecanismo biestable de un estado de equilibrio a otro.
Según los desarrolladores, este estudio en cierto sentido "borra la frontera entre materiales y robots", ya que el material en sí mismo actúa como una máquina en el dispositivo: "Nuestros ejemplos muestran que podemos usar materiales estructurados que se deforman en respuesta a señales ambientales, por control y movimiento de robots,
dice Chiara Daraio, profesora de ingeniería mecánica y física aplicada en las ciencias aplicadas y de ingeniería del Instituto de Tecnología de California, una de las autoras de un artículo científico.
El robot es impulsado por tiras de polímero flexible, que se encoge cuando hace frío y se estira cuando se calienta. El polímero se coloca para activar un interruptor biestable en el cuerpo del robot, que a su vez está unido a un elemento móvil, por ejemplo, a una paleta para golpear hacia adelante.
El estudio se basa en
trabajos científicos previos sobre las cadenas de elementos biestables para transmitir señales y diseñar puertas lógicas de una máquina programable.
Además de la temperatura, el robot se puede programar para realizar acciones en función de otras condiciones, por ejemplo, para responder a los cambios en la acidez del medio.
El artículo científico se
publicó el 15 de mayo de 2018 en la revista
Proceedings of the National Academy of Sciences de los Estados Unidos de América (doi: 10.1073 / pnas.1800386115,
pdf ).