En el último
post, hablamos sobre qué proyectos de robótica intelectual son de interés para Sberbank. Hoy analizaremos los cobots: historia, clasificación, cómo se pueden obtener o usar para resolver sus problemas.
 Fuente: Robots universales
Fuente: Robots universalesParte 1. ¿Qué es un cobot?
Simplemente llamar a su robot colaborativo no es suficiente. Debe cumplir con los requisitos de los estándares internacionales, el principal de los cuales es
ISO / TS 15066: 2016 (analógico americano
ANSI / RIA TR R15.606: 2016 ). Aunque será más correcto decir que esto no es un estándar, sino una especificación técnica. Hay una diferencia: ISO a veces desarrolla especificaciones técnicas antes de emitir las normas oficiales finales. Este es un reconocimiento del hecho de que el estado actual de la robótica colaborativa es dinámico y evolucionará con el tiempo.
El formato de las especificaciones técnicas es necesario para corregir el estado de "aquí y ahora" para que la comunidad pueda trabajar, sabiendo que habrá cambios en el futuro.
Según ISO, un
cobot (abreviatura de
robot colaborativo ) es un robot diseñado para la interacción directa con una persona dentro de un determinado espacio articular.
Un robot colaborativo
PUEDE ser utilizado para colaboración (
ISO 10218 ).
La colaboración es un estado en el que un sistema robótico especialmente diseñado y un operador trabajan en el marco de un área de trabajo conjunta.
Espacio conjunto : un espacio de trabajo protegido en el que un robot y una persona pueden realizar tareas simultáneamente durante una operación de fabricación.
Lo más probable es que tenga preguntas:
- ¿El robot se volverá colaborativo si quito la cerca protectora de un robot industrial convencional? No
- ¿El robot se volverá colaborativo si limito el poder y la fuerza del manipulador? No porque Un objeto afilado, incluso con poca fuerza, puede dañar a una persona.
- Si el robot es colaborativo, ¿significa esto que no necesito hacer una evaluación de riesgos? La evaluación de riesgos debe hacerse.
En pocas palabras, este es un robot que puede realizar tareas en un espacio común con una persona, sin dañarlo, es decir,
encontrar a una persona en el área de trabajo de un cobot es absolutamente seguro . Diferencias del cobot del robot industrial habitual:
- muchos de ellos son más baratos que el robot industrial habitual: $ 24 mil en lugar de $ 40 + mil;
- más fácil de instalar y configurar (los robots pesan aproximadamente 30 kg, solo necesita un enchufe de 220v, hay una GUI);
- es flexible, es fácil cambiarlo (interfaces de programación intuitivas, no es seguro para los humanos y el medio ambiente).
Anteriormente, los medios para proteger a las personas consistían en separarlos del equipo robótico con dispositivos de protección física, por ejemplo, células.

 Pixabay.comControleng.com
Pixabay.comControleng.comCon la llegada de los sistemas robóticos colaborativos, este paradigma ha cambiado: ahora pueden trabajar juntos.

 www.objektifhaber.com/aslan-gibi-dostluk-94036-haberwww.ge.com/reports/3-1b-collaborative-co-bot-market-isnt-hazard-free¿Por qué es eso bueno?
www.objektifhaber.com/aslan-gibi-dostluk-94036-haberwww.ge.com/reports/3-1b-collaborative-co-bot-market-isnt-hazard-free¿Por qué es eso bueno? Porque obtenemos una sinergia de las fortalezas del robot (alta velocidad y precisión al realizar operaciones de rutina) y humanos (pensamiento creativo, trabajo en situaciones no estándar). Esto aumenta la productividad en la industria, lo que significa que tiene un efecto positivo en la economía en su conjunto.
ISO / TS 15066: 2016 es la primera especificación del mundo de requisitos de seguridad para robots colaborativos. El documento fue desarrollado por un comité (que incluyó expertos de 24 países y empresas manufactureras líderes) ISO desde 2010. Su objetivo es complementar los requisitos y recomendaciones para la operación conjunta de un robot industrial descritos en ISO 10218-1 e ISO 10218-2 ("Requisitos de seguridad para robots industriales"), ISO / TS 15066 define los requisitos de seguridad para la operación conjunta de sistemas robóticos industriales y un funcionamiento Miércoles El documento proporciona orientación para quienes realizan evaluaciones de riesgos cuando las personas y los robots trabajan juntos.
De acuerdo con ISO / TS 15066, existen 4 formas de colaboración:- Parada controlada (parada supervisada con clasificación de seguridad) ;
- Guía manual;
- Monitoreo de velocidad y separación ;
- Poder y fuerza limitante
Consideremos cada uno de ellos con más detalle.
Parada monitoreada con clasificación de seguridadEsta forma se usa cuando el robot actúa principalmente por sí solo, pero a veces una persona necesita ingresar al espacio de trabajo. Por ejemplo, un robot procesa una pieza de trabajo, pero en medio del proceso tecnológico, una persona debe realizar una operación con ella que el robot no puede hacer. Si una persona ingresa a una zona de seguridad predeterminada, el robot dejará de moverse. Al mismo tiempo, la potencia de los motores no desaparece, se detienen. Este es un punto muy importante, porque después de que una persona abandona la zona de seguridad, el robot reanudará el trabajo de inmediato. Esto le permite no perder el tiempo en un reinicio completo del programa de trabajo, como es el caso de una parada completa del robot. Si la gente pasara constantemente el robot, simplemente no tendría tiempo para trabajar.
- Se proporciona una parada sin pérdida de potencia del motor (pausa, no parada).
- El operador puede interactuar con el robot.
- El trabajo automático puede reanudarse cuando una persona abandona el espacio de trabajo.
- En un momento dado, una persona o un robot pueden moverse.
- Se puede usar con robots industriales comunes, pero debe agregar barreras de seguridad ligeras (telémetros láser, detectores de fotos).
Guía manualEsta forma de colaboración se utiliza para operaciones precisas con objetos pesados (por ejemplo, instalar puertas de automóviles). Esta forma se puede usar para trabajar con robots industriales comunes, pero con un dispositivo adicional que "detecta" las fuerzas que el trabajador aplica al manipulador, generalmente es un sensor de torque en la brida del robot.
- El operador está en contacto directo con el robot.
- El robot está bajo control manual.
- Tanto los humanos como los robots pueden moverse simultáneamente (los movimientos son controlados por humanos).
- Se pueden usar robots industriales ordinarios.
- Se requiere equipo adicional (sensor de par).
Control de velocidad y separación.Aquí, el entorno del robot está controlado por barreras de seguridad ligeras, que rastrean la posición de las personas, como en la primera forma de colaboración. La diferencia radica en el escenario: si en la primera forma la tarea principal del robot es detenerse, entonces aquí está el trabajo simultáneo de una persona y un robot. El comportamiento del robot dependerá de las zonas preconfiguradas en su programa de control: a medida que una persona se acerca, el robot reduce la velocidad de sus movimientos, y si una persona se acerca tanto que es inevitable una colisión, se produce una parada. A medida que una persona se aleja, el robot reanuda el trabajo y acelera.

- La velocidad del robot disminuye a medida que se acerca una persona.
- El robot se detiene cuando se produce una colisión con una persona.
- Una persona y un robot pueden moverse simultáneamente.
- Se puede usar con robots industriales comunes, pero debe agregar barreras de seguridad ligeras (telémetros láser, detectores de fotos).
- Utilizado para operaciones que requieren presencia frecuente de personal.
Imagen: Roberta Nelson Shea - "ISO / TS 15066 Introducción"Las tres formas de colaboración descritas anteriormente se pueden usar con robots industriales convencionales, sujeto a la disponibilidad de dispositivos adicionales. Dichas soluciones se denominan
sistemas robóticos colaborativos . La diferencia entre un
robot colaborativo es que no puede usar dispositivos de seguridad adicionales (externos), ya están integrados en él. Otra diferencia importante entre los sistemas robóticos colaborativos y los robots colaborativos es que, al trabajar juntos, se excluye el contacto con una persona. Pero un robot colaborativo puede estar en contacto con el cuerpo humano sin dañarlo. Esto se logra limitando el poder y el esfuerzo.
Poder y fuerza limitanteLa mayoría de las personas, que representan al cobot, se refieren a un robot que utiliza esta forma particular de colaboración. Por lo tanto, lo consideramos con más detalle.
En las "articulaciones" del robot hay sensores de torque que pueden determinar el hecho de una colisión con una persona. Si los sensores detectan un exceso de fuerzas permitidas, el robot se detiene. Estos robots también están diseñados para dispersar fuerzas en una superficie amplia, en caso de un impacto, es por eso que los detalles de su cuerpo a menudo se hacen con formas redondeadas. La funcionalidad para limitar la potencia y la fuerza, como regla, se incluye en el software estándar.
- La fuerza y la potencia del robot se controlan para que el contacto accidental entre el robot y el operador no cause daños.
- Una persona y un robot pueden moverse simultáneamente.
- Posibles medidas de reducción de riesgos:
- Factores de diseño del robot (por ejemplo, formas redondeadas, materiales maleables);
- una elección adecuada de aplicaciones y el diseño de la celda del robot (por ejemplo, agarre, pieza de trabajo, trayectoria, etc.).
El contacto en PFL puede ser de dos tipos: transitorio (transitorio) y cuasiestático ( cuasiestático ) .
| Contacto de transición
| Cuasiestático
contacto
|
Descripción
| Evento de contacto "corto" (<50 ms).
Parte del cuerpo humano generalmente puede rebotar.
| El contacto puede ser largo.
Parte del cuerpo humano puede ser capturado.
|
Criterios de límite (lo que debe gestionarse)
| Esfuerzo impulsivo, presión, tensión.
Transferencia de energía, potencia específica.
| Fuerzas pico, presión, voltaje
|
Accesibilidad en diseño / control
| Posición del robot, carga útil.
Velocidad (relativa).
Área de contacto, duración.
| Fuerza (pares de enlace, posición).
Área de contacto, duración.
|
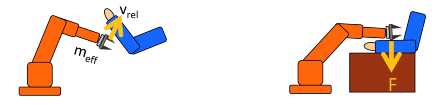 Imagen: Bjoern Matthias - "Robots colaborativos Poder y limitación de fuerza"Medidas de reducción de riesgos
Imagen: Bjoern Matthias - "Robots colaborativos Poder y limitación de fuerza"Medidas de reducción de riesgos | Contacto de transición
| Contacto cuasi estático
|
Construcción
| Disminución del peso efectivo.
Mayor área de contacto.
Mayor duración del contacto.
| Mayor área de contacto.
|
Gestión
| Disminución de la velocidad relativa.
Disminución de la masa efectiva mediante la selección de posición adecuada.
| Reducción del par y potencia máximos.
Tiempo de contacto reducido.
|
La configuración definitiva es el equilibrio entre seguridad y rendimiento.La especificación técnica ISO / TS 15066 incluye una tabla desarrollada por la Universidad de Mainz sobre el estudio del umbral de dolor, que proporciona una lista de niveles de fuerza y presión para diseñar los esfuerzos del robot (se estudió el umbral de dolor de 100 dolores en 29 puntos de dolor).


 Fuente: ISO / TS 15066: 2016, Fig. 4, Fig. A.1
Fuente: ISO / TS 15066: 2016, Fig. 4, Fig. A.1 Fuente: ISO / TS 15066: 2016.Fuente: R. Nelson Shea, NRSC 2016 Presentation. Usado con permisoRecuerde: la seguridad es la ausencia de lesiones.
Fuente: ISO / TS 15066: 2016.Fuente: R. Nelson Shea, NRSC 2016 Presentation. Usado con permisoRecuerde: la seguridad es la ausencia de lesiones.Parte 2. La historia de los cobots
El primer cobot fue desarrollado en 1996 por
J. Edward Colgate y
Michael Peshkin de la Northwestern University (EE. UU.). En comparación, los robots industriales convencionales se habían fabricado durante más de 30 años en este momento. Sin embargo, el término "cobot" fue acuñado como resultado de una competencia por el mejor nombre por otra persona de la misma universidad: Brent Gillespie. Al Wall Street Journal le gustó tanto el término que lo pusieron en la lista
de Palabras del Mañana y le dieron un premio de $ 50
La primera patente de cobot se presentó en los Estados Unidos en febrero de 1996 (
US 5.923.129 ), y la patente con el término cobot en octubre de 1997 (
US 5.952.796 ).
Las fotos de los primeros cobots se pueden ver aquí.El desarrollo de cobots en la Northwestern University fue apoyado por los fondos corporativos General Motors y Ford, así como por la Fundación Nacional de Ciencias de EE. UU. En el mismo 1996, los científicos fundaron la compañía Cobotics (en 2002 fue absorbida por Stanley Assembly Technologies).
Los cobots ganaron su popularidad actual gracias a la aparición de la compañía Universal Robots (Dinamarca) en 2005. La idea de un robot barato y fácil de configurar y operar (en comparación con uno industrial) surgió en 2003. Después de hacer varios prototipos, en 2008 la compañía lanzó el primer prototipo en serie del robot UR5 (el más popular hasta la fecha) y recibió inversiones del gobierno danés. En 2012, la compañía lanzó un segundo robot (UR10), y en 2015 fue adquirido por el estadounidense Teradyne por $ 285 millones.
Fue después del éxito de Universal Robots que las corporaciones comenzaron a fabricar cobots que habían ocupado durante mucho tiempo el mercado de robots industriales (FANUC, ABB, KUKA, BOSCH y otros), y comenzaron a aparecer nuevas empresas similares:
Rethink Robotics , Doosan Robotics, Techman Robot. Entre los proyectos jóvenes también hay inmigrantes de los países de la CEI: la startup bielorrusa Rozum Robotics.
Parte 3. Dónde y cómo se usan los cobots
¿Cuántos cobots hay en el mundo? A pesar de la creciente popularidad de los cobots, aún no se han seleccionado en una clase separada en el estudio anual World Robotics, que realiza la fuente de datos líder de la industria, la Federación Internacional de Robótica (IFR).
Alrededor de 2 millones de piezas de robots industriales se utilizan actualmente en el mundo (pronóstico IFR para 2017). Cuántos de ellos son colaborativos no se sabe exactamente. Existe una evaluación de la investigación de Barclays, según la cual en 2017 había 32 mil cobots en funcionamiento, la gran mayoría de los cuales fueron producidos por
Universal Robots .
Hace unos años, los cobots se consideraban exclusivamente equipos de laboratorio, que no tienen un lugar en la producción, pero la posibilidad de una configuración flexible y costos de integración mínimos nos permitieron superar la barrera psicológica. Ahora los robots de esta clase se utilizan en la industria ligera, alimentaria e incluso en la industria automotriz tradicionalmente ocupada por robots clásicos.
Barclays Research
estima el mercado en 2017 en $ 800 millones. Existe evidencia de que hasta un tercio de los cobots se
venden en China . IFR valoró el mercado de robots industriales en 2017 en $ 13.1 mil millones.
Pronóstico para años futuros:
IFR predice el tamaño total del mercado de robots industriales para 2020 en $ 23,2 mil millones. Si comparamos las estimaciones de Barclays e IFR, obtendremos un aumento notable en la proporción de cobots en el total: del 6,1% en 2017 al 13,5% en 2020, de forma bastante dinámica.
Qué pueden hacer los cobots:- Pick & Place: carga y descarga de la cinta transportadora.
- Carga / descarga de piezas de trabajo en máquinas.
- Prueba y clasificación de piezas: verificación u ordenación de objetos aleatorios en el transportador como parte del control de calidad u otras necesidades.
- Embalaje: recogida y colocación de artículos en contenedores para su transporte o almacenamiento.
- Fácil montaje: montaje de electrónica y electrodomésticos.
- Operaciones de acabado: eliminación del exceso de plástico o metal de las piezas.
Motores de crecimiento de Cobot en los próximos años:1. Los Cobots son más baratos que los robots industriales comunes (~ $ 25 mil en lugar de ~ $ 50) -> se reduce el umbral de entrada para las pequeñas y medianas empresas (PYME).
2. Los Cobots son más fáciles de configurar: no es necesario poder programar. Después de un día de capacitación, el trabajador podrá configurar el robot para realizar tareas de complejidad media.
Puedes probarlo tú mismo . Es decir, no es necesario contratar ingenieros de servicio o integradores de sistemas -> el umbral de entrada para las PYME vuelve a disminuir.
3. Kobotov es más fácil de mover: son más fáciles que los industriales, no necesitan una infraestructura local en forma de jaula -> el atractivo para las PYME está aumentando, ya que la producción se puede restablecer rápidamente.
4. El
aumento en el costo de la mano de obra debido al envejecimiento de la población y la
disminución del número de personas sin discapacidad (tarifa de trabajador por hora: € 40 en Alemania, € 12 en los Estados Unidos, € 11 en Europa del Este y € 9 en China. El costo del cobot es de $ 6 / hora) .
5. Restaurar la sinergia de factores anteriores lleva al hecho de que los Estados Unidos y la UE están devolviendo la producción de China a su tierra natal. Esto puede ayudar a reducir los costos de envío y mejorar la calidad del producto.
6. Programas estatales destinados a la automatización y robotización de la producción. Pueden estimular y apoyar (incluso financieramente) la adquisición y el uso de robots:
- "Industria 4.0" en Alemania;
- "Hecho en China 2025" en China;
- "Iniciativa nacional de robótica 2.0" en los Estados Unidos.
Parte 4. ¿Quién produce los cobots?
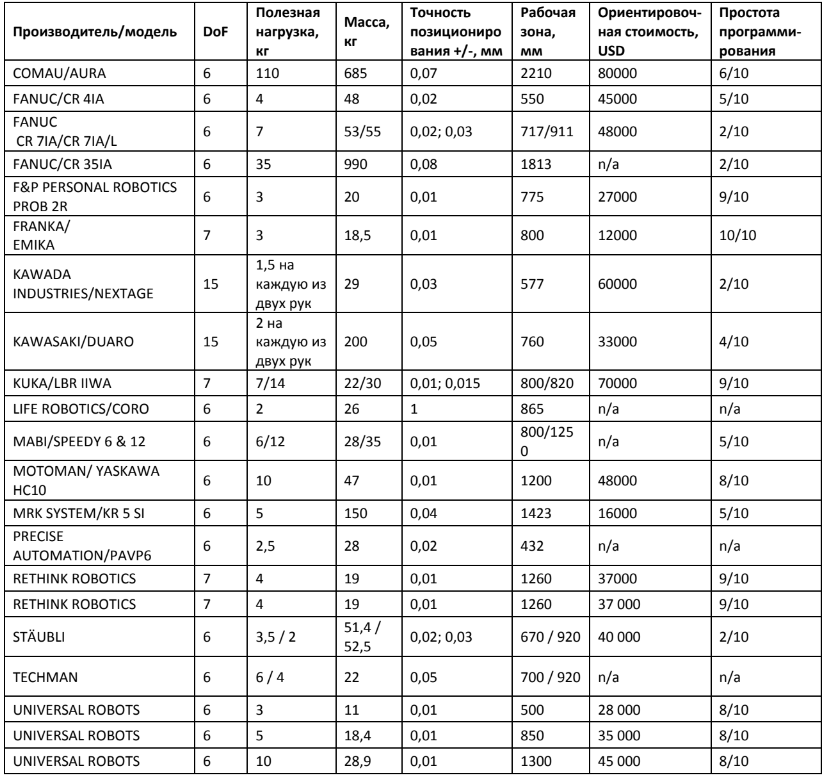 Descargar tabla
Descargar tablaParte 5. Cómo puedes ganar en cobots y cómo usarlos para resolver tus problemas
Cómo ganar dinero en cobots:
Para usar cobots en la resolución de sus problemas, es necesario identificar procesos (tareas) potenciales para la automatización. Ideal para la primera automatización serán tareas repetitivas con un alto grado de certeza (predecible).
| Solo
automatizar
| Duro
automatizar
|
Las tareas
| Moviendo objetos, siguiendo una trayectoria sin esfuerzo
o con esfuerzo constante
| Control de fuerza, por ejemplo, pulido o ensamblaje de precisión
|
Artículos
| Una pequeña variedad de artículos (tamaños, masa,
material), formas conocidas y ordinarias (cilindro, caja)
| Una amplia variedad de artículos, formas complejas,
objetos deformables y frágiles
|
Arreglo de asignaturas
| Artículos apilados de manera uniforme: en una caja, apilar o en una paleta
| Los artículos se tiran en una caja / canasta o se mueven
transportador rápido
|
Integración con otros equipos.
| Usando las interfaces que usa una persona:
botones, bolígrafos
| Conexión y configuración de sensores, integración de software.
con máquinas herramientas
|
Programacion
| Movimientos repetitivos en una secuencia (sin
condiciones y arboles)
| Lógica compleja y muchas condiciones dependiendo de
información de sensores
|
Aquí puede calcular el ROI de su proyecto de robótica.El artículo utilizó la traducción de las siguientes publicaciones:
- Carole Franklin - "Descripción general ISO / TS 15066: 2016"
- Roberta Nelson Shea - "Introducción a ISO / TS 15066"
- Bjoern Matthias - "Robots colaborativos Poder y limitación de fuerza"
- blog.robotiq.com/what-does-collaborative-robot-mean
- Robotiq - "Cobot eBook", "Introducción a los robots colaborativos", "ISO / TS 15066 explicado"
El texto fue preparado por Albert Efimov y Denis Zatyagov del Laboratorio de Robótica Sberbank