Este video es donde Marc Raibert, el fundador de Boston Dynamics, habla sobre robots: BigDog, Spot, SpotMini, Atlas. Con base en este video y otros videos donde realizó Marc, describiré brevemente las tecnologías de robots y los planes futuros de la compañía.
Marc Raibert fundó Boston Dynamics hace 25 años, pero aún no ha puesto en producción sus robots. El fundador explica esto con el hecho de que la compañía ha estado trabajando todo este tiempo para un desarrollo más rápido más allá del horizonte de las capacidades de la robótica actual. Sin embargo, en sus robots, la compañía alcanzó el nivel cuando se hizo posible hacer un pequeño robot eléctrico con cuatro patas capaz de moverse independientemente por terrenos y edificios irregulares. Por lo tanto, van a comenzar la producción en masa del robot SpotMini a mediados de 2019 en la cantidad de 1000 piezas por año.
Actualmente, 10 robots están siendo probados por clientes potenciales, otros 100 serán entregados dentro de un año para pruebas.
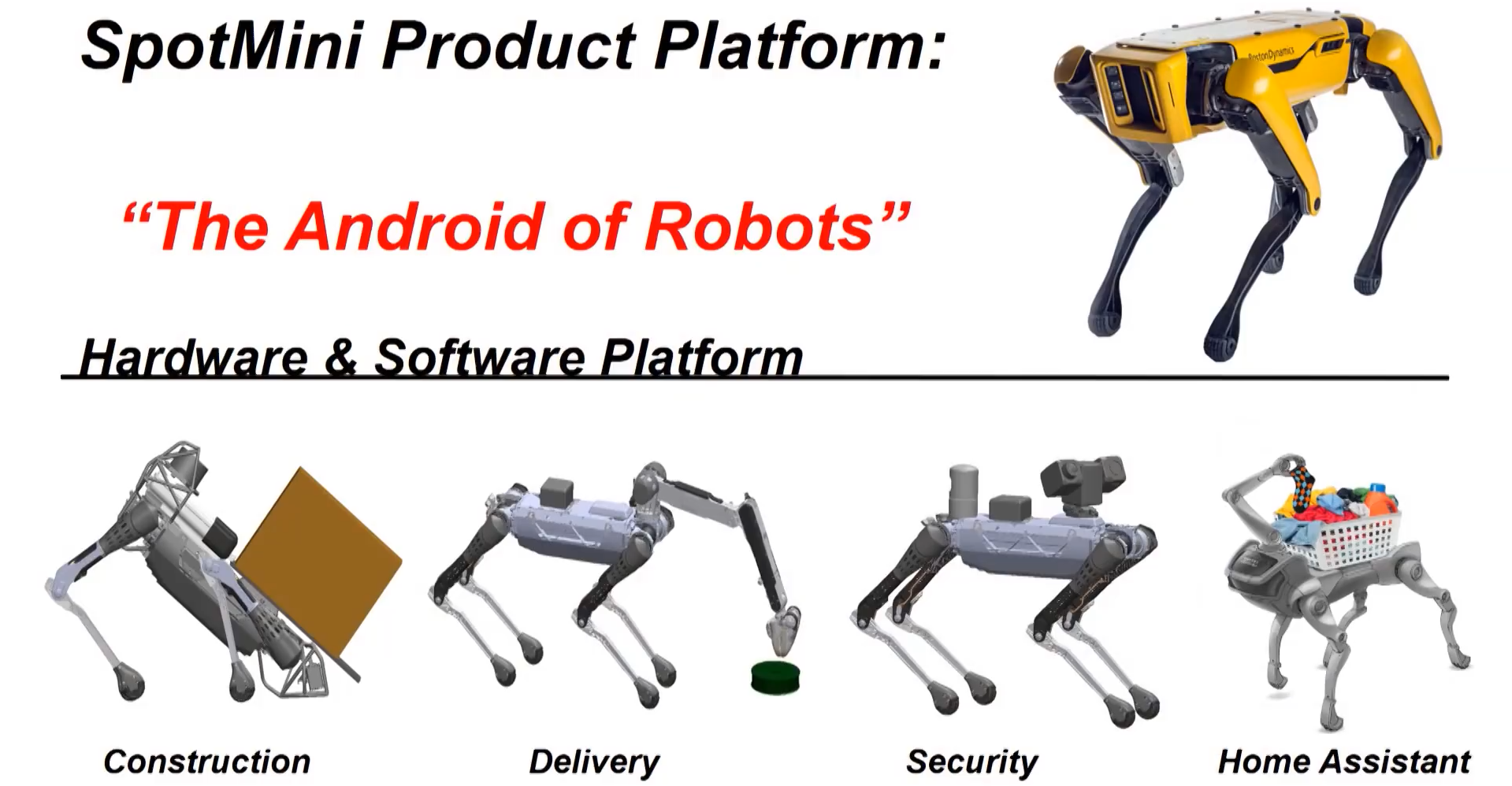
El robot se venderá como una plataforma en la que puede instalar su mano. Tiene una API con la cual los desarrolladores externos podrán escribir sus aplicaciones y usar la funcionalidad básica del robot. Hay varias demostraciones de tales aplicaciones en el video.
Se entiende que Boston Dinamics ha establecido la funcionalidad básica en el robot, y solo los comandos de alto nivel, como ir allí a esa velocidad, se pueden dar al operador del robot o a un desarrollador externo, envíe una lata de Coca-Cola.
Marc afirma que el robot puede actuar junto a una persona y es esencialmente colaborativo, lo que justifica en el video para que el robot pese solo 27 kilogramos y, por lo tanto, no pueda causar daño a los humanos.

SpotMini puede detectar una lata de Coca-Cola, tomarla y transferirla a otro lugar, o dársela a la gente. La foto de arriba es solo un ejemplo de una aplicación para un robot que realiza dicha tarea.
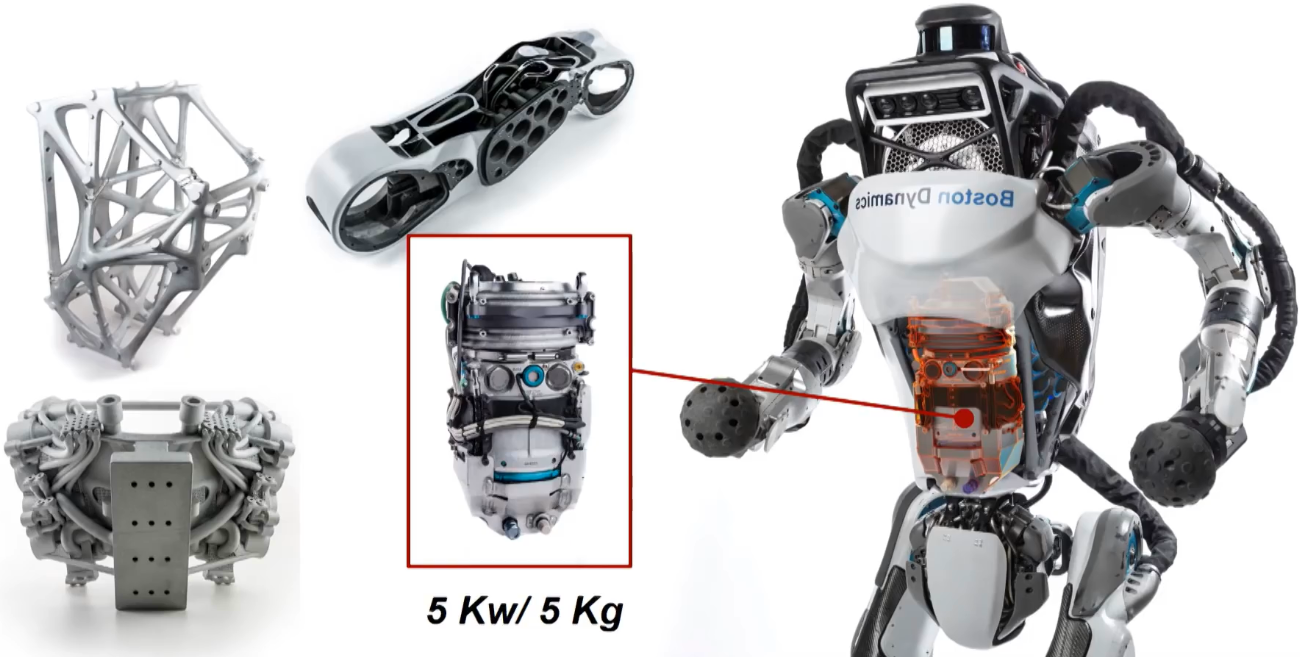
También es interesante la historia sobre las tecnologías utilizadas en el robot Atlas. El peso inicial del robot se redujo de 170 kilogramos a 75 con la misma relación de potencia. Al mismo tiempo, el robot se ha vuelto mucho más ágil y capaz. Esto se logró debido a los nuevos métodos de diseño y la impresión en 3D. El video muestra una pata de robot impresa en una impresora, que pesa varias veces menos con la misma fuerza.
Especialmente vale la pena señalar sobre la planta de energía. En el video, Marc dice que lograron encajar en él: un motor, una bomba, un filtro, un colector y una camisa térmica con una batería en el estómago del robot, mientras que el peso de toda la estructura era de 5 kilogramos con una potencia de 5 kilovatios. Una vez más, dice que esto no hubiera sido posible sin técnicas avanzadas de diseño e impresión 3D.


En otro video, habla sobre el robot Handle, está planeado como un robot logístico que puede transportar cargas rápidamente a largas distancias, porque en lugar de patas tiene ruedas.
Una pequeña ingeniería inversa de mi parte:
En el video, Marc Raibert dice que el robot usa 5 módulos de cámara, dos al frente y uno a la izquierda, derecha y atrás. Aparentemente rechazaron el láser LIDAR en la versión comercial. La foto muestra que el módulo de la cámara es de alguna manera no estándar, en total puede ver 5 cámaras en el módulo, tal vez varias de ellas son una cámara infrarroja con un receptor. También se ve que las dos cámaras son pequeñas y aparentemente en ángulo entre sí. Si alguien sabe qué es este módulo, escriba los comentarios. De todo esto podemos concluir que el robot solo puede funcionar con cámaras estéreo, posiblemente con una cámara de profundidad infrarroja. El algoritmo de posicionamiento y localización es muy probable que sea un SLAM visual, que no está claro. En general, la compañía Boston Dinamics es bastante cerrada y no habla mucho sobre el software de sus robots, pero en los foros las personas que trabajan en ella escriben que tienen su propio código propietario, principalmente en C ++ y un poco en Python. Se menciona el uso de Drake. Quizás en el robot Atlas, ROS se utilizó parcialmente en competiciones.
En mecánica y cálculo del movimiento de las extremidades de los robots, la investigación de Marc Raibert ha estado en marcha desde que fundó el laboratorio de movimiento de los pies en 1980 y escribió el libro Legged Robots that Balance en 1986. Además, de los estudios del MIT que describí en un artículo anterior sobre el robot guepardo ciego, podemos concluir que también se utilizan métodos similares en SpotMini ya que Marc Raibert era profesor en el MIT.
De hecho, será el primer robot suficientemente funcional y complejo que se utilizará diariamente junto a una persona. Si bien solo puede tomar una lata de Coca-Cola y bolsos de mujer, todavía habrá :)