"El objetivo de este curso es prepararte para tu futuro técnico".
Queda por publicar 2 capítulos ...
Modelado - III
Continuaré con la dirección general dada en el capítulo anterior, pero esta vez me concentraré en la vieja expresión "Basura adentro - basura afuera", que a menudo se abrevia como GIGO (basura adentro, basura afuera). La idea es que si coloca datos recopilados incorrectamente y expresiones definidas incorrectamente en la entrada, entonces la salida solo puede obtener resultados incorrectos. También se supone implícitamente lo contrario: a partir de la disponibilidad de datos de entrada precisos, se obtiene el resultado correcto. Mostraré que ambos supuestos pueden ser falsos.
A menudo, el modelado se basa en resolver ecuaciones diferenciales, por lo que para empezar consideraremos la ecuación diferencial más simple del primer orden de la forma
Como recordará, el campo de dirección son las líneas construidas en cada punto del plano xy, con los coeficientes angulares dados por la ecuación diferencial (Figura 20.I). Por ejemplo, una ecuación diferencial tiene un campo de dirección que se muestra en la Figura 20.II.
Figura 20.IPara cada círculo concéntrico,
tal que la pendiente de la línea es siempre la misma y depende del valor de k. Dichas curvas se llaman
isoclinas .
Ahora veamos el campo de dirección de otra ecuación diferencial (Figura 20.III). En el lado izquierdo vemos un campo de direcciones divergente, lo que significa que pequeños cambios en los valores iniciales o pequeños errores de cálculo conducirán a una gran diferencia en los valores en el medio de la ruta. En el lado derecho vemos que el campo de dirección está convergiendo. Esto significa que con una diferencia mayor en el medio de la ruta, la diferencia de valores en el extremo derecho será pequeña. Este simple ejemplo muestra cómo los errores pequeños pueden volverse grandes, los errores grandes pequeños y, además, cómo los errores pequeños pueden volverse grandes y luego pequeños nuevamente. Por lo tanto, la precisión de la solución depende del intervalo específico en el que se calcula la solución. No hay una precisión general absoluta.
Figura 20.IIFigura 20.IIIEstas consideraciones están diseñadas para funcionar
que es una solución a la ecuación diferencial
Probablemente haya imaginado una "tubería" que primero se expande y luego se estrecha alrededor de la "solución verdadera y exacta" de la ecuación. Esta representación es perfecta para el caso de dos mediciones, pero cuando tengo un sistema de n ecuaciones diferenciales (28 en el caso del problema del misil interceptor para la Armada mencionado anteriormente), estas "tuberías" alrededor de la verdadera solución a la ecuación no son lo que parecen a primera vista Una figura que consta de cuatro círculos en dos dimensiones conduce a la paradoja de las n dimensiones para el espacio de diez dimensiones que se describe en el Capítulo 9. Esta es solo otra vista del problema del modelado estable e inestable, descrito en el capítulo anterior. Esta vez daré ejemplos específicos relacionados con ecuaciones diferenciales.
¿Cómo resolvemos ecuaciones diferenciales numéricamente? Comenzando con la ecuación diferencial habitual de primer orden, dibujamos un campo de direcciones. Nuestra tarea es hacer que un valor inicial determinado calcule el valor en el siguiente punto de interés más cercano para nosotros. Si tomamos el coeficiente de pendiente local de la línea dada por la ecuación diferencial y damos un pequeño paso adelante a lo largo de la tangente, entonces introduciremos solo un pequeño error (Figura 20.IV).
Usando este nuevo punto, nos moveremos al siguiente punto, pero como se puede ver en la figura, nos desviamos gradualmente de la curva verdadera, porque usamos el coeficiente de pendiente del paso anterior, y no el coeficiente de pendiente real para el intervalo actual. Para evitar este efecto, "predecimos" un cierto valor, luego lo usamos para estimar el coeficiente angular en este punto (usando la ecuación diferencial), y luego usamos el valor promedio del coeficiente angular en los dos límites del intervalo como el coeficiente angular para este intervalo.
Luego, usando esta pendiente promedio, vamos un paso más allá, esta vez usando la fórmula de "corrección". Si los valores obtenidos usando las fórmulas de "pronóstico" y "corrección" son lo suficientemente cercanos, entonces asumimos que nuestros cálculos son lo suficientemente precisos, de lo contrario, debemos reducir el tamaño del paso. Si la diferencia entre los valores es demasiado pequeña, entonces debemos aumentar el tamaño del paso. Por lo tanto, el esquema tradicional predictor-corrector tiene un mecanismo incorporado para verificar errores en cada paso, ¡pero este error en un paso particular no es en modo alguno un error acumulado común! Está absolutamente claro que el error acumulado depende de si el campo de dirección converge o diverge.
Figura 20.IVFigura 20.VUtilizamos líneas rectas simples tanto para el paso de pronóstico como para el paso de corrección. El uso de polinomios de grados más altos da un resultado más preciso; Por lo general, se utilizan polinomios de cuarto de grado (la solución de ecuaciones diferenciales por el método de Adams-Bashfort, el método de Milne, el método de Hamming, etc.) Por lo tanto, debemos usar los valores de la función y sus derivadas en varios puntos anteriores para predecir el valor de la función en el siguiente punto, después de lo cual usamos la sustitución de este valor en la ecuación diferencial y aproximamos el nuevo valor del coeficiente angular. Usando los valores nuevos y anteriores del coeficiente angular, así como los valores de la función deseada, corregimos el valor obtenido. Es hora de notar que el corrector no es más que un filtro recursivo digital en el que los valores de entrada son derivados y los valores de salida son los valores de la función deseada.
La estabilidad y otros conceptos discutidos anteriormente siguen siendo relevantes. Como se mencionó anteriormente, hay un ciclo de retroalimentación adicional para la solución predicha de la ecuación diferencial, que a su vez se utiliza para calcular el coeficiente angular ajustado. Ambos valores se utilizan para resolver la ecuación diferencial, los filtros digitales recursivos son solo fórmulas y nada más. Sin embargo, no son características de transferencia, ya que se consideran comúnmente en la teoría de los filtros digitales. En este caso, el cálculo de los valores de la ecuación diferencial simplemente tiene lugar. En este caso, la diferencia entre los enfoques es significativa: en los filtros digitales, la señal se procesa linealmente, mientras que al resolver ecuaciones diferenciales existe una no linealidad, que se introduce calculando los valores de las derivadas de la función. Esto no es lo mismo que un filtro digital.
Si resuelve un sistema de n ecuaciones diferenciales, entonces está tratando con un vector de n componentes. Usted predice el siguiente valor de cada componente, evalúa cada una de las n derivadas, ajusta cada uno de los valores pronosticados y luego acepta el resultado del cálculo en este paso o lo rechaza si el error local es demasiado grande. Tiende a pensar en los pequeños errores como una "tubería" que rodea una verdadera ruta calculada. Y de nuevo, le insto a que recuerde la paradoja de los cuatro círculos en espacios de alta dimensión. Tales "tuberías" pueden no ser lo que parecen a primera vista.
Ahora permítanme señalar la diferencia significativa entre los dos enfoques: métodos computacionales y la teoría de los filtros digitales. En los libros de texto comunes, solo se describen métodos de matemática computacional que aproximan funciones por polinomios. ¡Los filtros recursivos usan frecuencias en las fórmulas de evaluación! Esto lleva a diferencias significativas!
Para ver la diferencia, imaginemos que estamos desarrollando un simulador de un aterrizaje humano en Marte. El enfoque clásico se concentra en la forma de la trayectoria de aterrizaje y utiliza la aproximación polinómica para las regiones locales. La ruta resultante tendrá puntos de ruptura en la aceleración, a medida que avancemos paso a paso de un intervalo a otro. En el caso del enfoque de frecuencia, nos enfocaremos en obtener las frecuencias correctas y dejar que la ubicación sea lo que resulta ser. En el caso ideal, ambas trayectorias serán iguales, pero en la práctica pueden diferir significativamente.
¿Qué caminata debo usar? Cuanto más lo piense, más se sentirá inclinado a creer que el piloto en el simulador quiere tener una "idea" del comportamiento del módulo de aterrizaje, y parece que la respuesta de frecuencia del simulador debe ser bien "sentida" por el piloto. Si la ubicación es ligeramente diferente, el circuito de retroalimentación compensará esta desviación durante el proceso de aterrizaje, pero si la "sensación" del control difiere durante el vuelo real, el piloto estará preocupado por las nuevas "sensaciones" que no estaban en el simulador. Siempre me pareció que los simuladores deberían preparar a los pilotos para las sensaciones reales tanto como sea posible (por supuesto, no podemos simular la baja gravedad en Marte durante mucho tiempo), para que se sientan cómodos cuando en realidad se encuentran con una situación con la que se encuentran. encontrado repetidamente en el simulador. Por desgracia, sabemos muy poco acerca de lo que "siente" el piloto. ¿El piloto solo percibe las frecuencias reales de la expansión de Fourier, o también percibe las complejas frecuencias de Laplace que se desvanecen (o tal vez deberíamos usar wavelets?). ¿Los diferentes pilotos sienten lo mismo? Necesitamos saber más de lo que sabemos ahora sobre estas condiciones esenciales de diseño.
La situación descrita anteriormente es una contradicción estándar entre el enfoque matemático y de ingeniería para resolver el problema. Estos enfoques tienen diferentes objetivos en la resolución de ecuaciones diferenciales (como en el caso de muchos otros problemas), por lo tanto, conducen a resultados diferentes. Si se le ocurre el modelado, verá que hay matices ocultos que resultan ser muy importantes en la práctica, pero sobre los cuales los matemáticos no saben nada y negarán en todos los sentidos las consecuencias de descuidarlos. Echemos un vistazo a dos caminos (Figura 20.IV), que estimé aproximadamente. La curva superior describe con mayor precisión la ubicación, pero las curvas dan una "sensación" completamente diferente en comparación con el mundo real, la segunda curva está más equivocada en la ubicación, pero tiene una mayor precisión en términos de "sensación". Una vez más, demostré claramente por qué creo que una persona con una comprensión profunda del área temática del problema también debe comprender los métodos matemáticos para resolverlo y no confiar en los métodos tradicionales de solución.
Ahora quiero contar otra historia sobre los primeros días de prueba del sistema de defensa antimisiles Nike. En ese momento, las pruebas de campo se llevaban a cabo en White Sands, que también se llamaba "prueba de teléfono de campo". Estos fueron lanzamientos de prueba en los que el cohete tenía que seguir una trayectoria predeterminada y explotar en el último momento, de modo que toda la energía de la explosión no fuera más allá de cierto territorio y causara más daño, que era preferible a una caída más suave de partes individuales del cohete en el suelo, que supuestamente debería haber hecho menos daño. El objetivo de las pruebas fue obtener medidas reales de elevación y arrastre en función de la altitud y velocidad de vuelo para depurar y mejorar el diseño.
Cuando conocí a mi amigo que había regresado de las pruebas, deambuló por los pasillos de los Laboratorios Bell y parecía bastante miserable. Por qué Porque los primeros dos de los seis lanzamientos programados fallaron en el medio del vuelo y nadie sabía por qué. Los datos necesarios para las etapas de diseño posteriores no estaban disponibles, lo que significaba serios problemas para todo el proyecto. Dije que si él me puede proporcionar ecuaciones diferenciales que describan el vuelo, entonces puedo poner a la niña a resolverlas (no fue fácil acceder a computadoras grandes a fines de la década de 1940). Después de aproximadamente una semana, proporcionaron siete ecuaciones diferenciales de primer orden y la niña estaba lista para comenzar. Pero, ¿cuáles fueron las condiciones iniciales un momento antes del inicio de los problemas en vuelo? (En aquellos días, no teníamos suficiente poder de cómputo para calcular rápidamente la ruta de vuelo completa). ¡No lo sabían! Los datos de telemetría eran incomprensibles un momento antes del fracaso. No me sorprendió y no me molestó. Entonces, utilizamos los valores estimados de altitud, velocidad de vuelo, ángulo de ataque, etc. - una condición inicial para cada una de las variables que describen la ruta de vuelo. En otras palabras, tenía basura en la entrada. ¡Pero antes me di cuenta de que la naturaleza de las pruebas de campo que simulamos era tal que las pequeñas desviaciones de la trayectoria propuesta fueron corregidas automáticamente por el sistema de guía! Estaba tratando con un campo de direcciones muy convergente.
Descubrimos que el cohete era estable a lo largo de los ejes transversal y vertical, pero cuando uno de ellos se estabilizó, un exceso de energía provocó oscilaciones a lo largo del otro eje. Por lo tanto, no solo hubo oscilaciones a lo largo de los ejes transversal y vertical, sino también una transmisión periódica de energía creciente entre ellos, causada por la rotación del cohete alrededor de su eje longitudinal. Tan pronto como se demostraron las curvas calculadas para una pequeña parte de la trayectoria, todos inmediatamente se dieron cuenta de que la estabilización cruzada no se tenía en cuenta, y todos sabían cómo solucionarla. Entonces, obtuvimos una solución que también nos permitió leer los datos de telemetría estropeados obtenidos durante las pruebas y aclarar el período de transferencia de energía; de hecho, proporcionar las ecuaciones diferenciales correctas para los cálculos. Tuve un poco de trabajo, excepto para asegurarme de que la chica de la calculadora de escritorio calculara honestamente todo. Entonces, en mayo, el mérito fue comprender que (1) podemos simular lo que sucedió (ahora es una rutina en la investigación de accidentes, pero luego fue una innovación) y (2) el campo de dirección converge, por lo que las condiciones iniciales pueden no especificarse exactamente.
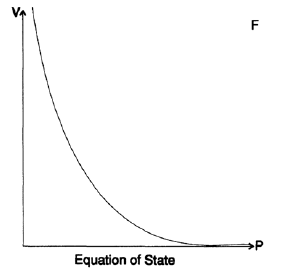
Te conté esta historia para demostrar que el principio GIGO no siempre funciona. Una historia similar me sucedió durante una simulación de bomba temprana en Los Alamos. Gradualmente, llegué a comprender que nuestros cálculos, construidos para la ecuación de estado, se basaban en datos bastante inexactos. La ecuación de estado relaciona la presión y la densidad de una sustancia (también temperatura, pero la omitiré en este ejemplo). Los datos de los laboratorios de alta presión, las aproximaciones obtenidas del estudio de los terremotos, la densidad del núcleo estelar y la teoría asintótica de presiones infinitas se representaron como puntos en un papel cuadriculado muy grande (Figura 20.VII). Luego, usando patrones, dibujamos curvas que conectaban los puntos dispersos. Luego, en base a estas curvas, construimos tablas de valores de funciones con una precisión de 3 decimales. Esto significa que simplemente asumimos 0 o 5 en el cuarto decimal. Utilizamos estos datos para construir tablas hasta el quinto y sexto lugar decimal. Sobre la base de estas tablas, se construyeron nuestros cálculos adicionales. En ese momento, como ya mencioné, era una especie de calculadora, y mi trabajo consistía en contar y, por lo tanto, liberar a los físicos de esta ocupación, para permitirles hacer su trabajo.
Después de que terminó la guerra, me quedé en Los Alamos durante otro medio año, y una de las razones por las que hice esto fue porque quería entender cómo esos datos inexactos podrían conducir a una simulación tan precisa del diseño final. Pensé en esto durante mucho tiempo y encontré la respuesta. En el medio de los cálculos, utilizamos diferencias finitas de segundo orden. La diferencia de primer orden mostró el valor de la fuerza en un lado de cada caparazón, y las diferencias de las capas adyacentes en ambos lados dieron la fuerza resultante, que mueve la capa. Nos vimos obligados a usar conchas finas, por lo que restamos números muy cercanos entre sí, y necesitábamos usar muchos dígitos después del punto decimal. Otros estudios mostraron que cuando la "cosa" explotó, el caparazón se movió hacia arriba a lo largo de la curva, y probablemente a veces retrocedió parcialmente, por lo que cualquier error local en la ecuación de estado estaba cerca del valor promedio. Era realmente importante obtener la curvatura de la ecuación de estado y, como ya se señaló, debería haber sido precisa en promedio. Por lo tanto, ¡basura en la entrada, pero resultados más precisos que nunca!
Estos tres ejemplos muestran lo que se mencionó implícitamente anteriormente: si hay un ciclo de retroalimentación para las variables utilizadas en el problema, entonces no es necesario conocer exactamente sus valores. Basado en esto, la notable idea de G.S. Black de cómo construir un bucle de retroalimentación en los amplificadores (Figura 20.VIII): siempre que la ganancia sea muy alta, solo la resistencia de una resistencia debe coincidir con precisión, todas las demás partes pueden implementarse con baja precisión. Para el circuito que se muestra en la Figura 20.VIII obtenemos las siguientes expresiones:
Figura 20.VIIIComo puede ver, casi toda la incertidumbre de medición se concentra en una resistencia con un valor nominal de 1/10, mientras que el coeficiente de transmisión puede ser inexacto. Entonces, el ciclo de retroalimentación de Black nos permite construir cosas precisas a partir de partes inexactas.Ahora ves por qué no puedo darte una fórmula elegante adecuada para todas las ocasiones. Debería depender de qué cálculos se realicen en cantidades específicas. ¿Los valores inexactos pasarán por un ciclo de retroalimentación que compensa el error, o los errores saldrán del sistema sin protección de retroalimentación? Si no se proporciona retroalimentación para las variables, entonces es vital obtener sus valores exactos.Por lo tanto, la conciencia de este hecho puede afectar el diseño del sistema. Un sistema bien diseñado lo protege de tener que usar una gran cantidad de componentes de precisión. Pero estos principios de diseño todavía no se entienden por el momento y requieren un estudio cuidadoso. Y el punto no es que los buenos diseñadores no entiendan esto a nivel de intuición, simplemente no es tan fácil aplicar estos principios en los métodos de diseño que estudiaste. Las buenas mentes todavía necesitan todas las herramientas de diseño automatizadas que hemos desarrollado. Las mejores mentes podrán integrar estos principios en los métodos de diseño estudiados para hacerlos accesibles "listos para usar" para todos los demás.Pasemos ahora a otro ejemplo y principio, que me permitió obtener una solución a un problema importante. Me dieron una ecuación diferencialSe nota de inmediato que el valor de la condición en el infinito es, de hecho, el lado derecho de la ecuación diferencial igual a cero, Figura 20.IXPero veamos el tema de la estabilidad. Si el valor de y en algún punto suficientemente remoto x se vuelve lo suficientemente grande, entonces el valor de sinh ( y ) se vuelve mucho más grande, la segunda derivada asume un valor positivo grande, y la curva se dispara hacia más infinito. Del mismo modo, si ydemasiado pequeño, entonces la curva se dispara hacia menos infinito. Y no importa en absoluto si nos estamos moviendo de izquierda a derecha o de derecha a izquierda. Anteriormente, cuando me encontré con un campo de direcciones divergentes, utilicé el truco obvio: me integré en la dirección opuesta y obtuve la solución exacta. Pero en este caso, es como si estuviéramos en la cresta de una duna de arena y tan pronto como ambas piernas estén en la misma pendiente, nos derrumbamos.Figura 20.IXIntenté usar la expansión en series de potencia, expansión en series sin potencia que se aproxima a la curva original, pero el problema no desapareció, especialmente para valores grandes de k. Ni yo ni mis amigos pudimos ofrecer ninguna solución adecuada. Luego fui a los directores de problemas y, en primer lugar, comencé a disputar la condición límite en el infinito, sin embargo, resultó que esta condición estaba relacionada con la distancia medida en las capas de las moléculas, y en ese momento, cualquier transistor prácticamente factible tenía un número casi infinito de capas. Luego comencé a disputar la ecuación, y nuevamente ganaron la discusión, y tuve que regresar a mi oficina y seguir pensando.Esta fue una tarea importante relacionada con el diseño y la comprensión de los transistores que se estaban desarrollando en ese momento. Siempre he argumentado que si la tarea es importante y se plantea correctamente, entonces puedo encontrar alguna solución. Por lo tanto, no tenía otra opción; era una cuestión de honor.Me tomó unos días de reflexión darme cuenta de que la inestabilidad era la clave para un método adecuado. Construí la solución de la ecuación diferencial en un pequeño intervalo usando el analizador diferencial que tenía en ese momento, y si la solución se disparó, significa que elegí demasiado coeficiente angular, si se disparó, también elegí pequeño valor Por lo tanto, con pequeños pasos, caminé a lo largo de la cresta de la duna, y tan pronto como la decisión llegó a un lado, supe lo que había que hacer para volver a la cresta. Como puede ver, el orgullo profesional es un buen ayudante cuando necesita encontrar una solución para una tarea importante en condiciones difíciles. Qué fácil fue negarse a resolver este problema, referirse al hecho de que no tenía solución,plantea incorrectamente o encuentra otras excusas, pero sigo creyendo que las tareas importantes y correctamente planteadas le permiten obtener nueva información útil. Varios problemas relacionados con la carga espacial, que resolví utilizando métodos computacionales, tenían una complejidad similar asociada con la inestabilidad en ambas direcciones.Antes de contarte la siguiente historia, quiero recordarte la prueba de Rorschach, que fue popular durante mi juventud. Se aplica una gota de tinta a una hoja de papel, después de lo cual se dobla por la mitad, y cuando se desenvuelve nuevamente, se obtiene una mancha simétrica de una forma bastante aleatoria. La secuencia de estas manchas se muestra a los sujetos a quienes se les pide que digan lo que ven. Sus respuestas se utilizan para analizar las "características" de su personalidad. Obviamente, las respuestas son producto de su imaginación, ya que esencialmente el lugar tiene una forma aleatoria. Es como mirar las nubes en el cielo y discutir cómo se ven. Estás discutiendo solo los frutos de tu imaginación, no la realidad, y esto, en cierta medida, abre nuevas cosas sobre ti, no sobre las nubes. Sugiero que el método de tinción de tinta ya no se usa.Y ahora pasemos a la historia misma. Una vez, mi amigo psicólogo de los Laboratorios Bella construyó un automóvil en el que había 12 interruptores y dos bombillas: rojo y verde. Configura los interruptores, presiona el botón y luego se enciende una luz roja o verde. Después de que el primer sujeto hizo 20 intentos, propuso una teoría sobre cómo encender una bombilla verde. Esta teoría pasó a la siguiente víctima, después de lo cual ella también tuvo 20 intentos de proponer su teoría sobre cómo encender una bombilla verde. Y así sucesivamente hasta el infinito. El propósito del experimento fue estudiar cómo se desarrollan las teorías.¡Pero mi amigo, actuando en su propio estilo, conectó las bombillas a una fuente aleatoria de señales! Una vez se quejó de que ni un solo participante en el experimento (y todos ellos eran investigadores de clase alta en los Laboratorios Bell) dijo que no había un patrón. Inmediatamente sugerí que ninguno de ellos era especialista en estadística o teoría de la información: son estos dos tipos de especialistas los que están familiarizados con los eventos aleatorios. ¡Una prueba mostró que tenía razón!Esta es una triste consecuencia de tu educación. Estudiaste con amor cómo una teoría es reemplazada por otra, pero no has estudiado cómo abandonar una teoría hermosa y aceptar el azar. Esto era exactamente lo que se necesitaba: estar preparado para admitir que la teoría que acaba de leer no es adecuada y que no hay regularidad en los datos, ¡pura casualidad!Tengo que pensar en esto con más detalle. Los estadísticos se preguntan constantemente: "¿Qué es lo que quiero decir que realmente tiene lugar, o es solo ruido aleatorio?" Desarrollaron métodos de prueba especiales para responder esta pregunta. Sus respuestas no son un sí o un no definitivo, sino un sí o un no con cierto nivel de confianza. Un umbral de confianza del 90% significa que, por lo general, de cada 10 intentos, se equivocará solo una vez, siempre que todas las demás hipótesis sean correctas.En este caso, una de dos cosas: o encontró lo que no es (un error del primer tipo) o se perdió lo que estaba buscando (un error del segundo tipo). Se necesita mucha más información para obtener un nivel de confianza del 95%, y la recopilación de datos puede ser muy costosa en la actualidad. La recopilación de datos adicionales también requiere tiempo adicional y se pospone la toma de decisiones; este es un truco favorito de las personas que no quieren ser responsables de sus decisiones. "Necesita más información", le dirán.Absolutamente afirmo que la mayoría de las simulaciones realizadas no son más que una prueba de Rorschach. Citaré a un destacado profesional de la teoría del control de Jay Forrester: “Del comportamiento del sistema, surgen dudas que requieren una revisión de los supuestos iniciales. A partir del proceso de procesamiento de los supuestos iniciales sobre las partes y el comportamiento observado del todo, mejoramos nuestra comprensión de la estructura y la dinámica del sistema. Este libro es el resultado de varios ciclos de re-estudio realizados por el autor ".¿Cómo puede un laico distinguir esto de la prueba de Rorschach? ¿Vio algo simplemente porque quería verlo o descubrió una nueva faceta de la realidad? Desafortunadamente, muy a menudo el modelado contiene algunos ajustes que le permiten "ver solo lo que quiere". Este es el camino de menor resistencia, por lo que la ciencia clásica implica una gran cantidad de precauciones, que en nuestro tiempo a menudo simplemente se ignoran.¿Crees que eres lo suficientemente cuidadoso como para no hacer ilusiones? Veamos el famoso estudio doble ciego, que es una práctica común en medicina. Al principio, los médicos descubrieron que los pacientes notaron una mejora cuando pensaban que estaban recibiendo un nuevo medicamento, mientras que los pacientes del grupo de control que sabían que no estaban recibiendo un nuevo medicamento no sintieron una mejora. Después de esto, los médicos aleatorizaron los grupos y comenzaron a darles a algunos pacientes un placebo para que no pudieran engañar a los médicos. Pero para su horror, los médicos descubrieron que los médicos que sabían quién estaba tomando el medicamento y quién no, también encontraron mejoras en aquellos que lo esperaban y no encontraron una mejora en aquellos que no lo esperaban.Como último recurso, los médicos comenzaron a adoptar universalmente el método de estudio doble ciego, hasta que se recopilan todos los datos, ni los médicos ni los pacientes saben quién está tomando el nuevo medicamento y quién no. Al final del experimento, los estadísticos abren el sobre sellado y analizan. Los médicos que buscaban la honestidad descubrieron que ellos mismos no. ¿Estás haciendo la simulación mucho mejor para que puedas confiar? ¿Estás seguro de que simplemente no encontraste lo que estabas tan ansioso por encontrar? El autoengaño es muy común.¿Estás haciendo la simulación mucho mejor para que puedas confiar? ¿Estás seguro de que simplemente no encontraste lo que estabas tan ansioso por encontrar? El autoengaño es muy común.¿Estás haciendo la simulación mucho mejor para que puedas confiar? ¿Estás seguro de que simplemente no encontraste lo que estabas tan ansioso por encontrar? El autoengaño es muy común.Comencé el capítulo 19 haciendo la pregunta, ¿por qué todos deberían creer la simulación realizada? Ahora este problema se ha vuelto más obvio para usted. No es tan fácil responder esta pregunta hasta que tome muchas más medidas de precaución de las que generalmente se toman. Recuerde también que en su futuro de alta tecnología, lo más probable es que represente el lado del cliente de la simulación y, en función de sus resultados, tendrá que tomar decisiones. No hay otras formas que modelar para obtener la respuesta a la pregunta "¿Qué pasaría si ...?". En el capítulo 18, consideré las decisiones que deberían tomarse, y no postergarse todo el tiempo, si la organización no va a revolver y a la deriva sin cesar, supongo que usted estará entre los que tendrán que tomar una decisión.El modelado es necesario para responder la pregunta "¿Qué pasaría si ...?", Pero al mismo tiempo está lleno de trampas, y no debe confiar en sus resultados simplemente porque se utilizaron grandes recursos humanos y de hardware para obtener hermosas impresiones en color o curvas en un osciloscopio. Si usted es quien toma la decisión final, entonces toda la responsabilidad recae en usted. Las decisiones colectivas que conducen a una confusión de responsabilidades rara vez son una buena práctica: generalmente son un compromiso mediocre que carece de los méritos de cualquiera de los posibles caminos. La experiencia me ha enseñado que un jefe decisivo es mucho mejor que un jefe parloteador. En este caso, usted sabe exactamente dónde se encuentra y puede continuar el trabajo que debe hacerse.La pregunta "¿Qué pasa si ...?" a menudo se enfrentará a usted en el futuro, por lo que debe lidiar con los conceptos básicos y las capacidades de modelado para estar listo para desafiar los resultados y comprender los detalles cuando sea necesario.Continuará ...¿Quién quiere ayudar con la traducción, el diseño y la publicación del libro? Escriba en un correo electrónico personal o correo electrónico magisterludi2016@yandex.ruPor cierto, también lanzamos la traducción de otro libro genial: "La máquina de los sueños: la historia de la revolución informática" )Contenido del libro y capítulos traducidosPrólogo- Intro to The Art of Doing Science and Engineering: Learning to Learn (March 28, 1995) : 1
- "Fundamentos de la revolución digital (discreta)" (30 de marzo de 1995) Capítulo 2. Fundamentos de la revolución digital (discreta)
- "Historia de las computadoras: hardware" (31 de marzo de 1995) Capítulo 3. Historia de las computadoras: hardware
- "Historia de las computadoras - Software" (4 de abril de 1995) Capítulo 4. Historia de las computadoras - Software
- Historia de las computadoras: aplicaciones (6 de abril de 1995) Capítulo 5. Historia de las computadoras: aplicación práctica
- "Inteligencia artificial - Parte I" (7 de abril de 1995) Capítulo 6. Inteligencia artificial - 1
- "Inteligencia artificial - Parte II" (11 de abril de 1995) Capítulo 7. Inteligencia artificial - II
- "Inteligencia Artificial III" (13 de abril de 1995) Capítulo 8. Inteligencia Artificial-III
- "Espacio N-Dimensional" (14 de abril de 1995) Capítulo 9. Espacio N-Dimensional
- "Teoría de la codificación - La representación de la información, Parte I" (18 de abril de 1995) Capítulo 10. Teoría de la codificación - I
- "Teoría de la codificación - La representación de la información, Parte II" (20 de abril de 1995) Capítulo 11. Teoría de la codificación - II
- "Códigos de corrección de errores" (21 de abril de 1995) Capítulo 12. Códigos de corrección de errores
- "Teoría de la información" (25 de abril de 1995) (el traductor desapareció: ((()
- Filtros digitales, Parte I (27 de abril de 1995) Capítulo 14. Filtros digitales - 1
- Filtros digitales, Parte II (28 de abril de 1995) Capítulo 15. Filtros digitales - 2
- Filtros digitales, Parte III (2 de mayo de 1995) Capítulo 16. Filtros digitales - 3
- Filtros digitales, Parte IV (4 de mayo de 1995) Capítulo 17. Filtros digitales - IV
- "Simulación, Parte I" (5 de mayo de 1995) Capítulo 18. Modelado - I
- "Simulación, Parte II" (9 de mayo de 1995) Capítulo 19. Modelado - II
- "Simulación, Parte III" (11 de mayo de 1995)
- Fibra óptica (12 de mayo de 1995) Capítulo 21. Fibra óptica
- “Instrucción asistida por computadora” (16 de mayo de 1995) (el traductor desapareció: ((()
- Matemáticas (18 de mayo de 1995) Capítulo 23. Matemáticas
- Mecánica cuántica (19 de mayo de 1995) Capítulo 24. Mecánica cuántica
- Creatividad (23 de mayo de 1995). Traducción: Capítulo 25. Creatividad
- "Expertos" (25 de mayo de 1995) Capítulo 26. Expertos
- “Datos no confiables” (26 de mayo de 1995) Capítulo 27. Datos no válidos
- Ingeniería de sistemas (30 de mayo de 1995) Capítulo 28. Ingeniería de sistemas
- "Obtiene lo que mide" (1 de junio de 1995) Capítulo 29. Obtiene lo que mide
- "Cómo sabemos lo que sabemos" (2 de junio de 1995) el traductor desapareció: (((
- Hamming, "Usted y su investigación" (6 de junio de 1995). Traducción: usted y su trabajo
¿Quién quiere ayudar con la traducción, el diseño y la publicación del libro? Escriba en un correo electrónico personal o correo magisterludi2016@yandex.ru