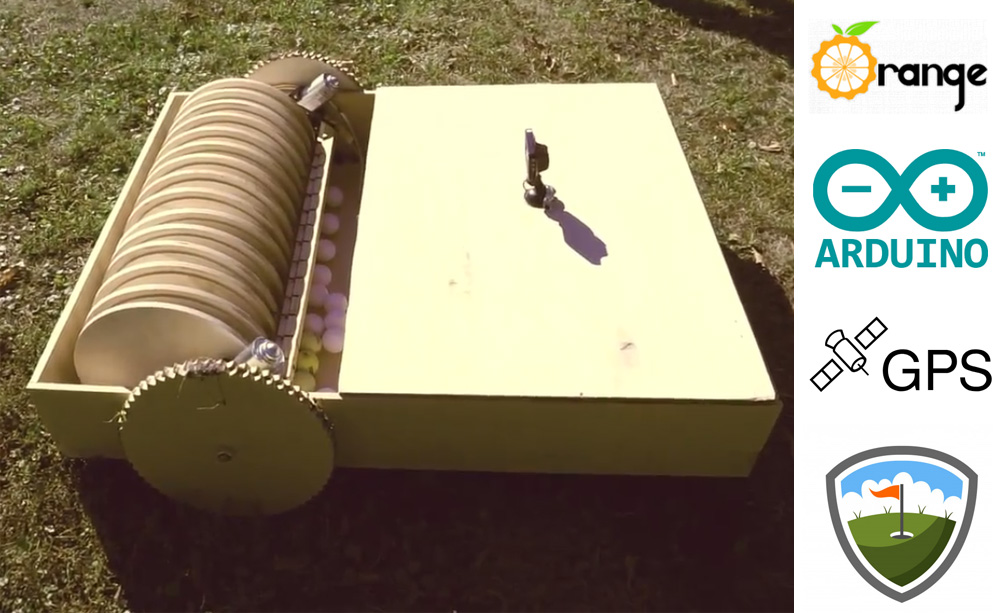
El proceso de desarrollo de un robot de servicio en Orangepi zero y arduino para recoger pelotas de golf. Todo el dolor de un desarrollador independiente, no cargado con una formación técnica en una publicación ...
Desarrollo MVP. Prueba de video.
¿Qué es el golf?
El golf es un juego deportivo. El objetivo principal es rodar la pelota dentro del hoyo en cada campo para menos golpes, para pasar todos los campos para menos golpes. En nuestro país, el golf está extremadamente mal desarrollado y es triste. El juego es bastante interesante, permite a las personas pasar tiempo al aire libre, comunicarse durante el juego, apto para todas las edades. El juego tiene una medida clara del éxito de tu handicap: un indicador numérico de las calificaciones de un atleta. Todos estos factores hacen del golf una actividad de transmisión. Si no has probado el golf, ¡es hora!

¿Qué es un campo de prácticas?
Para atacar desde la primera vez hasta el final del campo, más cerca del hoyo, debe ser capaz de realizar golpes largos y precisos. El Driving Range es un campo de entrenamiento para practicar tiros de golf largos y medianos. Estos campos se parecen a esto.

Estoy en el campo de prácticas. Esta es una ilustración de cómo atacar incorrectamente.

En una sesión de entrenamiento en ese campo, generalmente hacen más de cien golpes. Las manos para recoger estas bolas eran laboriosas y potencialmente mortales. A principios del siglo XX no había muchas opciones, pero en algunos lugares la mano de obra es más barata ahora.

Todavía se está utilizando una herramienta manual, pero esta es más bien la excepción.
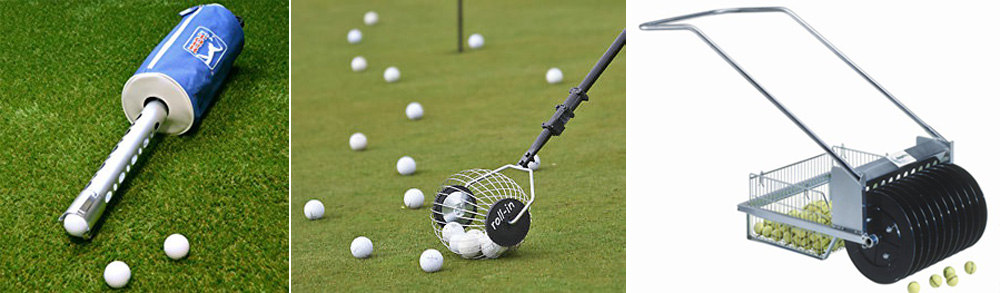
Muy a menudo, las bolas se recogen usando un enganche especial en un tractor, carrito de golf o automóvil común.

Para recoger las bolas, arrástrelas a la lavadora, la carga en el dispensador suele ser una persona especial en el estado, aunque el cuidador de césped también puede desempeñar este papel. (Graskipper es la persona responsable de la calidad del césped en los campos de golf).
El desarrollo e implementación de un robot de servicio para recoger pelotas de golf parece ser un paso razonable desde un punto de vista económico, ya que ahorra el mantenimiento de equipos especiales y el salario del empleado que supuestamente llevaría a cabo este proceso. El golf se desarrolla en todo el mundo, esta fotografía lo muestra claramente.
Este juego se extendió especialmente en los Estados Unidos y Europa, donde el nivel salarial es bastante alto y la capacidad de reemplazar a un empleado con un robot de servicio se amortiza muy rápidamente.
Encontrar una solución
Como resultado de la búsqueda se encontraron:
un par de proyectos de bricolaje

un par de hermosas representaciones
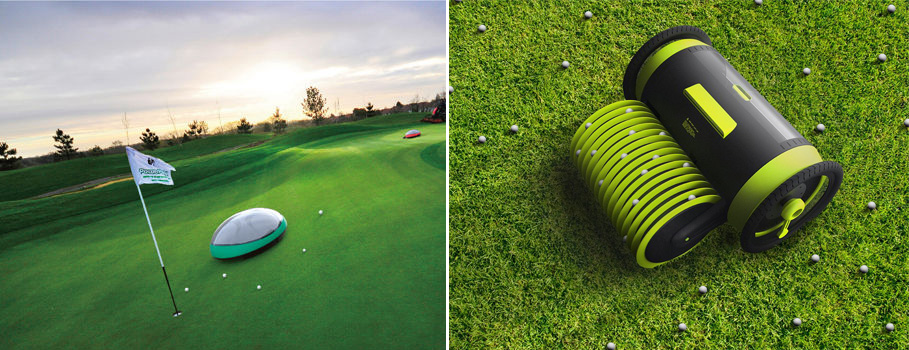
y un proyecto bastante comercial

De esto podemos concluir que hay interés. Lo más probable es que sea muy arriesgado invertir en soluciones de nicho. El costo de desarrollo y ajuste de la producción es alto, algunos moldes vendrán en varias decenas de miles de $. Hay un poco más de 40 palos de golf en Rusia, mientras que hay muchos en el mundo, solo en Alemania hay más de 700, y en total más de 34,000. Un robot recolector de bolas como producto definitivamente no pasará la prueba del cepillo de dientes en Good Corporation.
Es muy extraño que la administración de varios clubes de golf europeos con los que hablé no se enteró de la existencia de un robot ya hecho, aunque mostraron interés. Todos mis intentos de ponerme en contacto con esta empresa no tuvieron éxito, tal vez no puedan hacer frente a la cantidad de pedidos existentes.
No sé exactamente qué saldrá de eso. Tal vez en algún lugar en el camino desde la caja de madera contrachapada hasta la primera muestra "adulta", se llegue a entender si alguien lo necesita o no.
El objetivo inicial es obtener una muestra funcional sin prestar atención a la apariencia. Luego, planeo darle al robot una apariencia ordenada y ponerlo a prueba en un club de golf en Rusia. Después de depurar y realizar pruebas a largo plazo, proceda a procesar el modelo en un modelo adecuado para la producción.
Vamos!
Se planifican varios beneficios clave en relación con la solución comercial existente.
- No es necesario enterrar un cable de baja corriente alrededor del perímetro.
- Posibilidad de implementación en infraestructura existente.
- Menor costo y costo total de propiedad.
Caja y parte mecánica
El material para el cuerpo de la primera muestra fue madera contrachapada seleccionada. Barato, le permite recortar rápidamente algunas piezas en el lugar o perforar agujeros. Para que todo se ajustara claramente, dibujé un dibujo y se lo di a fresado.

Reunidos todos los detalles. Desde el principio surgió la idea de redondear el cuerpo, pero decidió detenerse estrictamente en MVP. Cualquier cosa que no afecte el rendimiento se excluye intencionalmente de la lista de tareas pendientes.

El mecanismo para capturar bolas durante la evolución de estos dispositivos ha demostrado su efectividad, por lo tanto, no se han considerado otras opciones.
Motor 12V 30 N / m. en cada rueda El mismo motor gira el eje con los discos de agarre, ya que se elevan por encima de la superficie para invertir en giros y aumentar la maniobrabilidad.

Inicialmente, los motores no eran chinos. No hubo un momento en la descripción, por lo que el riesgo era grande. El momento claramente no fue suficiente, lo que no se puede decir sobre los motores desde las ventanas.
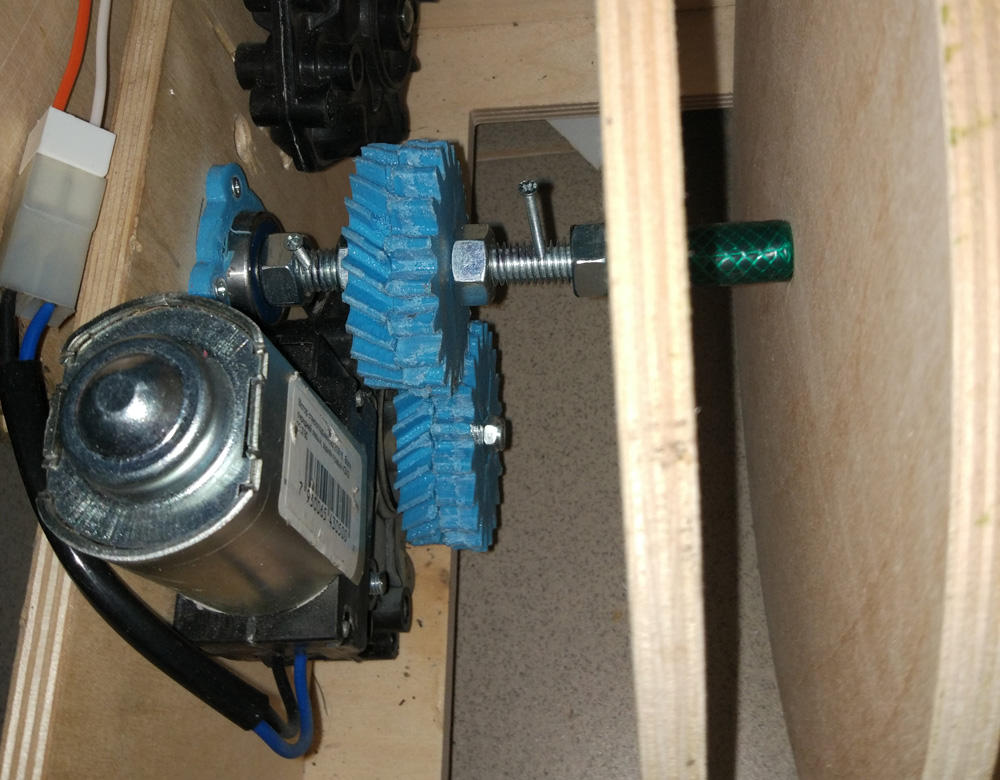
Después de cambiar los motores, se tuvieron que imprimir otros engranajes.
Electrónica
Dado que el rover debería funcionar sin un cable electromagnético a lo largo del contorno del campo, de alguna manera necesita navegar y buscar una base para dejar caer bolas y recargar.
Decidí usar Orangepi lite y arduino para un trabajo más conveniente con 5v sin convertidores de nivel de zoológico para cada sensor y controlador de motor.
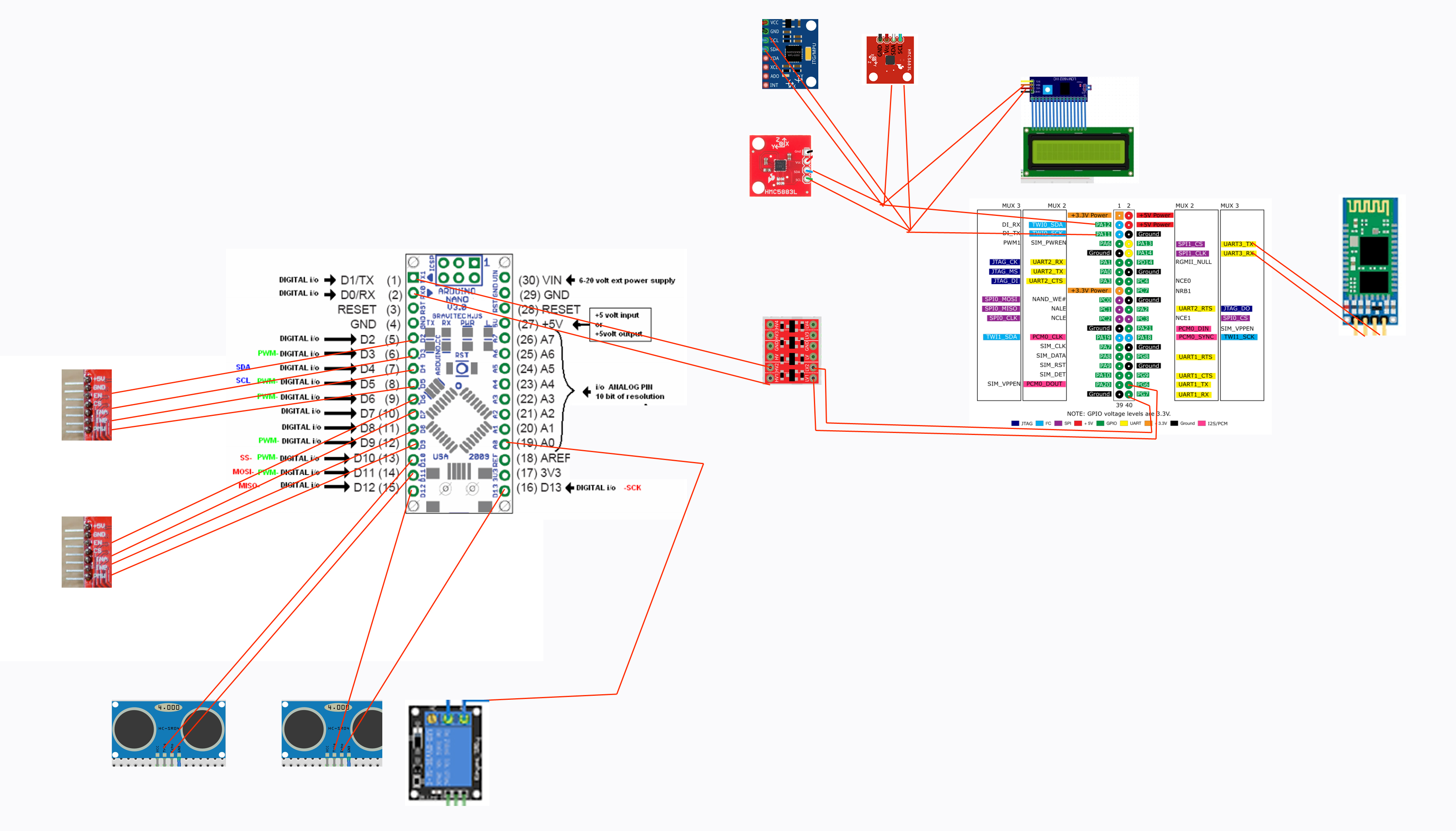
Ensamblado todos los módulos terminados en el tablero. Afecta la falta de experiencia en circuitos, creo que en el futuro no será un problema separar la placa para módulos o elementos discretos y ordenarla.

El esquema consta de 11 planes, 11 Karl!
- Orange Pi Lite
- Arduino nano
- Módulo GPS GY-NEO6MV2
- 2 controladores de motor VNH2SP30
- Bluetoth Hc-06
- 2 módulos ultrasónicos J34
- Convertidor de nivel lógico
- Módulo giroscopio y acelerómetro de 3 ejes GY-521 MPU-6050
- Bloque de dos relés
Por supuesto, esto se hizo para un montaje rápido, instalación y reemplazo de módulos.
Parte de software
El guión principal está escrito en Python. Hay un objetivo global en el ciclo del programa:
- Inicialización
- Recogiendo bolas
- Volver a la base
- Carga
- Vacaciones programadas
- Descansa en condiciones climáticas.
Inicialización
Durante la inicialización, se prueban los sistemas, se busca el GPS, se construye un mapa local entre países y se determina un objetivo adicional.
Recogiendo bolas
Durante la recolección de bolas en cada ciclo, actualizar el mapa del terreno local, construir un vector para el objetivo geográfico actual, sondear el sensor de hacinamiento con bolas, sondear la batería.
Volver a la base
En caso de desbordamiento del compartimento por espadas o agotamiento de la batería, el robot cambia el objetivo global para regresar a la base por la ruta más corta. Con una proximidad cercana a las coordenadas de la base, se realiza una búsqueda visual de la marca a lo largo de la cual se produce una orientación más precisa.
Carga, descanso
La carga se realiza hasta el voltaje de batería requerido. El descanso se puede programar a tiempo o activando un sensor de lluvia.
Vivienda

Muchas gracias por el diseño
habr.com/users/NikitaKhvorykEl cuerpo de soporte debe estar cubierto desde arriba con la parte superior, que sirve para proteger de la lluvia y las bolas que caen. La primera caja decorativa que planeo hacer de fibra de vidrio y epoxi. Estoy listo para escribir una publicación separada al respecto, si es interesante.

Video
Planes
Ya, el rover recoge el 95-100% de los objetivos en su camino. Construye una ruta dentro del polígono usando coordenadas GPS. Los planes:
- Encontrar una base para dejar caer bolas y cargar en una marca visual.
- Restablecimiento de servo bola.
- Sensor de desbordamiento del globo.
- Interfaz WEB para indicación visual de puntos en el mapa, construcción de zonas para recoger bolas con diferentes intervalos.
- Cuerpo.
- Colocación del robot en un club de golf en Moscú para una prueba en condiciones de combate.
Preguntas
Muchas veces después de la publicación que recibí de la comunidad habro, respondí a preguntas o consejos que me ayudaron mucho. A lo largo de la publicación hay varias preguntas a las que realmente necesito una respuesta. Decidí reunirlos por conveniencia.
- ¿Cómo hacer un cuerpo para el robot? Debe verse hermoso, sin inversión en moldes.
- ¿Vale la pena alejarse de los módulos y hacer todo en una placa? ¿Qué hacer con una microcomputadora?
- ¿Cómo encontrar financiación para un proyecto? ¿Dónde analizar muestras?
- Simplemente no puedo encontrar un ejemplo de un filtro Kalman para datos GPS con corrección por magnetómetro, giroscopio. Está Pycalman, pero no entiendo cómo encajar los datos de los sensores en la matriz. Incluso en la tostadora no encontró la respuesta. Estaría muy agradecido
Gracias por su atencion En el próximo post, una prueba en condiciones de combate. ¡Te mostraré lo que no se muestra, intentaré resolver lo no resuelto y descubriré todo lo desconocido!
Siempre tuyo, una startup principiante, el
administrador del enlace intermedio , el desarrollador de todo tipo de robots
1 ,
2 ,
3 ,
4 ,
5 ,
6 y gadget
1 ,
2 ,
3 . Y escribí dos historias
1 ,
2 y tomé un par de entrevistas
1 ,
2 ,
3 .
Estoy abierto al diálogo, consejos, ayuda, sugerencias.