Hola querido habuchitel!
Nuestro
GPS subacuático recientemente cumplió tres años. Durante este tiempo, el sistema se convirtió en serie, trajimos varios sistemas y dispositivos más al mercado, pero durante todo este tiempo no dejé la obsesión de llevar la hidroacústica a las masas, para hacerla accesible a los amantes comunes, modeladores, representantes de direcciones tales como
la ciencia
urbana y la ciudadanía
loca Otro interesado.
Y hoy, en honor a nuestro humilde aniversario, explicaré en detalle y con los dedos cómo determinar la ubicación geográfica de un objeto submarino utilizando solo dos transceptores: con código fuente, imágenes divertidas, gráficos y resultados experimentales.
¡Pido a todos los interesados en un kayak, en las aguas limpias y cálidas del embalse de Volgogrado!
 ATENCIÓN: el artículo contiene trazas de matan!
ATENCIÓN: el artículo contiene trazas de matan!Para aquellos que no entienden lo que está sucediendo, pero no les importa investigarlo, les sugiero que se familiaricen con nuestras publicaciones anteriores sobre el tema de la hidroacústica y la navegación subacuática:
Sesión de video transmisión de sonido a través del agua con exposiciónGPS subacuático desde cero por añoGPS subacuático: continuaciónSobre el efecto de las cianobacterias en las funciones del habla del presidenteNavegación bajo el agua: búsqueda de dirección: no busque dirección, está condenado al éxitoY también con un excelente
artículo de revisión
de akuzmin sobre hidroacústica
Introductorio
Bajo el agua, las ondas de radio no se extienden a ninguna distancia significativa, y la comunicación y navegación inalámbrica más o menos decente allí, de la mano del corazón, solo es posible con la ayuda de la acústica.
Solo hay dos tipos y medio de sistemas de navegación:
- base ultracorta (USB, USBL): basada en la determinación del ángulo de llegada de la señal de baliza y la medición de la distancia (ya sea por el método de solicitud-respuesta o por horas sincronizadas). El ángulo de llegada se determina utilizando una matriz de antenas. La posición deseada está determinada por el ángulo y el rango (tarea geodésica directa). El sistema UKB, por ejemplo, es nuestro ZIMA
- de largo alcance (DB, LBL): donde los tiempos de llegada de la señal se miden en varios receptores o desde varios transmisores (nuestro GPS subacuático funciona así) con una posición conocida. Puede medir distancias utilizando el método de "solicitud-respuesta" (método de telémetro) o medir las diferencias en los tiempos de llegada de la señal (método de telémetro de diferencia), por ejemplo, el trabajo de GPS y GLONASS. Una base larga puede ser flotante (como nuestra RedWAVE ) o inferior.
- Base corta (KB, SB), de hecho, los mismos sistemas de base larga, pero todos los elementos de soporte de la base se encuentran en la misma base, por ejemplo, en un barco.
Como dije, una base larga puede funcionar sobre una base de "solicitud-respuesta", en cuyo caso es necesario resolver el problema de intersección de N esferas o círculos, si se conoce la profundidad del objeto deseado.
O la base puede funcionar igual que GPS y GLONASS, tales sistemas también se denominan hiperbólicos, y esto es por qué: si el objeto deseado emite periódicamente una señal de navegación, y los relojes de todos los receptores (elementos básicos) están sincronizados, entonces la distancia no se puede medir directamente, pero solo puede averiguarlo cuál de los elementos base está más cerca o más lejos. Es decir, solo hay diferencias de distancia disponibles. Y como
sabes por el curso escolar:
"Una hipérbola se puede definir como la ubicación geométrica de los puntos, el valor absoluto de la diferencia en las distancias desde las cuales hasta dos puntos dados, llamados focos, es constante"
En otras palabras, si el objeto submarino emitió una señal y la recibimos en dos receptores cuyos relojes están sincronizados, entonces podemos decir que nuestro objeto se encuentra en un hiperboloide (o en una hipérbole si de repente nos transmitió su profundidad). Más receptores, ¡más hipérbolas! Más hipérbolas: mayor precisión de ubicación
sin palacio, sin palacio .
Y si no es el objeto submarino el que irradia, sino los elementos base, entonces el objeto submarino, conociendo su profundidad, puede determinar su ubicación en sí misma, y además, en este caso no molesta a nadie y puede haber tantos objetos como ellos, solo son oyentes. Así es como se organizan GPS / GLONASS y nuestro
RedWAVE .
Y prometí navegar a través de dos transceptores, uno de los cuales es la posición que debe determinarse.
Entendamos
Distancia entre dos puntos
A ( x a , y a , z a ) y
B ( x b , y b , z b ) en el espacio tridimensional se determina (nunca se sabe, de repente alguien lo olvidó) mediante una fórmula simple:
d A B = s q r t ( x a - x b ) 2 + ( y a - y b ) 2 + ( z a - z b ) 2
Supongamos que tenemos N estaciones base. Por razones humanitarias, suponemos que conocemos sus coordenadas y medimos las distancias.
d b n de cada una de las estaciones base
Bn(xbn,ybn,zbn) al objetivo T. Para mayor claridad: T es el objetivo y B es la base.
Entonces podemos por cualquier punto
M(x,y,z) escriba una expresión que muestre cómo este punto se ajusta a nuestras mediciones experimentales. De hecho, esta será la suma de las diferencias entre la distancia desde el punto M hasta la estación base correspondiente y la distancia medida. Ajustaremos cada una de estas diferencias.
epsilon(x,y,z)= sumNn=0 left( sqrt(x−xbn)2+(y−ybn)2+(z−zbn)2−dTbn right)
En general, se trata del método de mínimos cuadrados, y las coordenadas del punto deseado idealmente deberían ser el mínimo de la función ε.
Si hablamos del método de telémetro diferencial, que abordaremos en este artículo de manera completamente indiscriminada, y para cada estación base tenemos una distancia no medida
dbn y la hora de llegada de la señal
tOA , entonces en la expresión de la función del error no habrá distancias, sino sus diferencias. La única diferencia es que debe clasificar los pares necesarios de estaciones base, por ejemplo, para las estaciones n-ésima y n + 1-ésima:
sqrt(x−xbn)2+(y−ybn)2+(z−zbn)2− sqrt(x−xbn+1)2+(y−ybn+1)2+(z−zbn+1)2−v(tOAn−tOAn+1)
v - aquí significa la velocidad del sonido, que, por cierto, no es constante, sino que depende en gran medida de la densidad del medio, lectura, temperatura, salinidad y presión. Y si desea hacer todo de forma adulta, debe medirlo directamente o calcularlo, pero sobre esto en otro momento.
Tenga en cuenta que la profundidad de los objetos posicionados en los sistemas modernos de navegación sonar se mide directamente y con una precisión bastante alta (0.5-2 cm), lo que significa que tiene sentido traducir la tarea en una plana.
Sería posible informar que ahora estamos resolviendo esto mediante cualquier método de optimización y terminamos aquí.
Pero, en primer lugar, no todo es tan simple y, en segundo lugar, no todo es tan complicado.Comencemos con las dificultades.
El hecho es que mucho depende de la disposición de las estaciones base entre sí (de alguna manera puede verse influenciada, por ejemplo, por métodos administrativos =) y la posición del objeto posicionado, en relación con los elementos de la base (es mucho más difícil influir en esto, en una amplia gama de tareas inicialmente, la posición del objeto posicionado se conoce de manera muy aproximada y es casi imposible establecer una base de antemano).
Obtenga la situación como en la Figura 1 - como con buenos días:
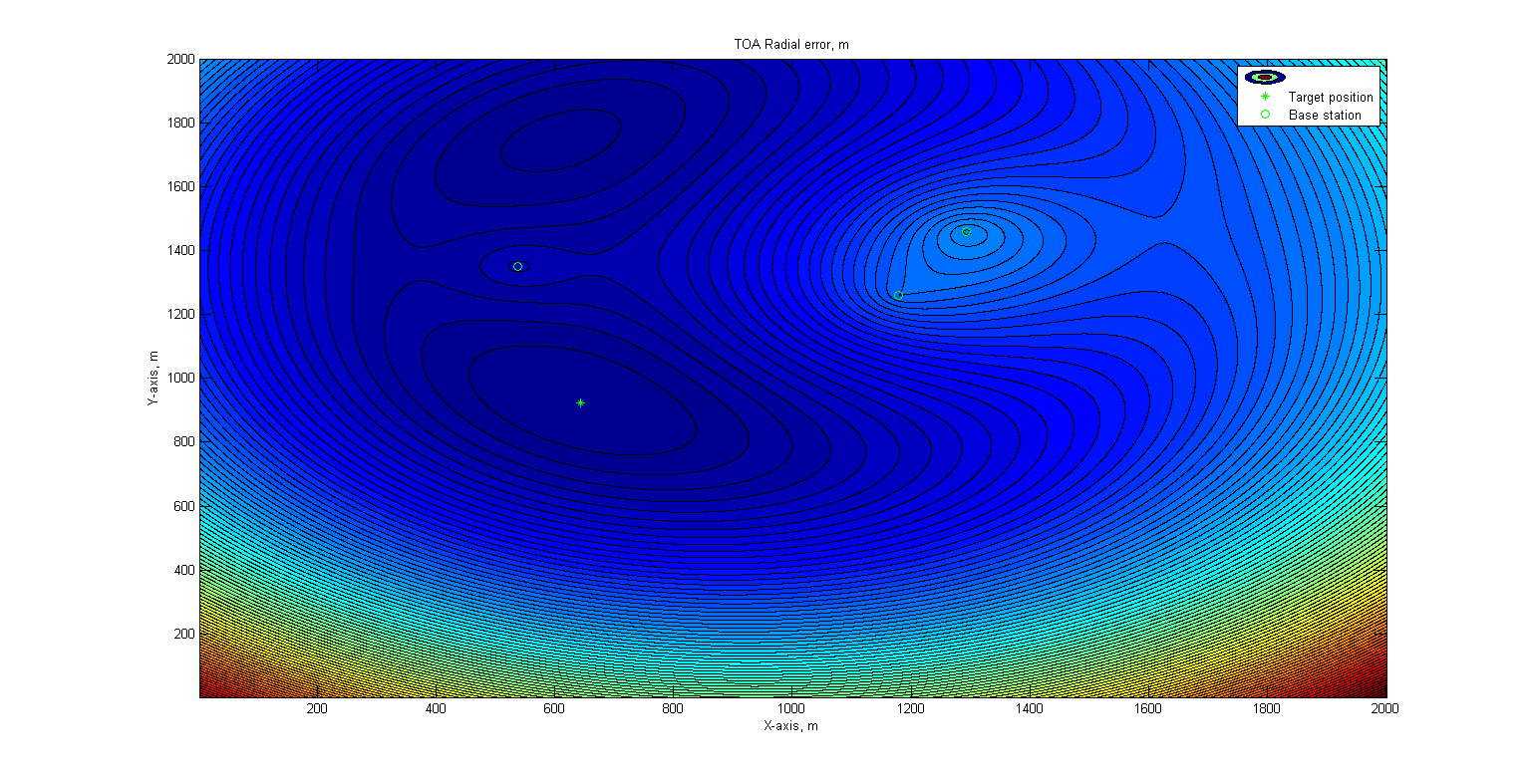 Figura 1 - La superficie de los errores para la base de sus tres elementos. Objeto colocado fuera de la base. La presencia de un mínimo falso
Figura 1 - La superficie de los errores para la base de sus tres elementos. Objeto colocado fuera de la base. La presencia de un mínimo falso
Los círculos verdes indican las posiciones de las estaciones base, y el asterisco indica la posición verdadera del objeto posicionado. El color de los puntos indica el valor de la función residual (ε) en ese punto. Como dijo un político, está claro que la superficie tiene dos depresiones, y cuando se busca un mínimo, es muy fácil caer en una falsa. La situación es aún peor: teniendo en cuenta la escala, la posición real del objeto y la velocidad promedio de movimiento de dichos objetos, podemos decir que estará en esta posición durante mucho tiempo, se preservará la forma de la superficie de los errores y es muy probable que durante mucho tiempo reciba datos incorrectos sobre la ubicación del objeto. .
La siguiente animación ilustra una situación similar: cuando se inicia una búsqueda desde un punto medio entre estaciones base y cuando se inicia desde una estación cercana, la búsqueda conduce a un mínimo falso:
 Figura 2 - La búsqueda alcanzó el mínimo falso al inicio desde el punto medio de la base. Base de tres elementos.
Figura 2 - La búsqueda alcanzó el mínimo falso al inicio desde el punto medio de la base. Base de tres elementos.La búsqueda aquí se implementa utilizando
el algoritmo Nelder-Mead o, como también se le llama, el método simplex. Se usa, por ejemplo, en Matlab en la función
fminsearchNo requiere el cálculo de derivados, es muy visual, intuitivo y fácil de implementar.
 Figura 3 - La búsqueda alcanzó el mínimo falso al comenzar desde el elemento base más cercano. Base de tres elementos.
Figura 3 - La búsqueda alcanzó el mínimo falso al comenzar desde el elemento base más cercano. Base de tres elementos.
Las personas con conocimientos pueden estar indignados de que nadie ponga las estaciones base en la línea, pero, en primer lugar, a veces lo hacen, y en segundo lugar, esto es una exageración para una demostración más visual.
“La derrota fue completa. No fue posible inventar nada "(C) A. y B. Strugatsky," Ciudad condenada "
¿Qué se te ocurre aquí?
La lógica sugiere que puede usar uno de los dos métodos de optimización global:
recocido simulado o algo similar. Sin embargo, otro enfoque (y más productivo) es utilizar de manera más completa la información a priori para seleccionar un punto de inicio de búsqueda.
Después de todo, sabemos con certeza que el punto deseado se encuentra (con una fracción de la suposición) en los círculos en los centros de los cuales hay estaciones base, ¡y los radios de estos círculos corresponden a los rangos medidos!
Y también estamos seguros de que el error al medir el rango en hidroacústica crece con este rango: el sonido se propaga de manera no lineal.
Puede tomar e intentar elegir el punto de partida para encontrar el mínimo alrededor (literalmente, en el círculo) de la baliza más cercana, con la esperanza de que la distancia a la misma se mida con la máxima precisión y se guíe por el mismo valor de la función residual ε.
Las coordenadas de los puntos candidatos se forman en este caso de acuerdo con las siguientes fórmulas simples:
x=xbc+dbccos alphay=ybc+dbcsin alpha
xbc y
ybc - coordenadas de la estación base más cercana (c - más cercana),
dbc - la distancia desde él al objeto posicionado.
alpha - argumento (ángulo). Si ahora busca un mínimo para
epsilonε variando
alpha en el rango de 0 a 360 grados con un paso, por ejemplo, de 10 grados, y luego busque al lado de este valor disminuyendo el paso a 1 grado y reduciendo el área de búsqueda a 20 (± 10) grados, puede determinar muy bien la aproximación inicial, que es prácticamente en todos los casos, ¡da en el blanco casi de inmediato!
En las imágenes a continuación, el método de solución "frontal" para 30 iteraciones valientemente cayó a un mínimo falso, lo que condujo a una solución absolutamente incorrecta, y el método con minimización unidimensional preliminar casi inmediatamente alcanzó el punto y en 6 iteraciones se acercó a la posición real con una divergencia de ~ 25 centímetros en La distancia a la estación base más cercana es de ~ 400 metros.
 Figura 4 - La búsqueda alcanzó el mínimo falso
Figura 4 - La búsqueda alcanzó el mínimo falso Figura 5: Encontrar la solución correcta al comenzar desde el punto obtenido por minimización unidimensional preliminar
Figura 5: Encontrar la solución correcta al comenzar desde el punto obtenido por minimización unidimensional preliminar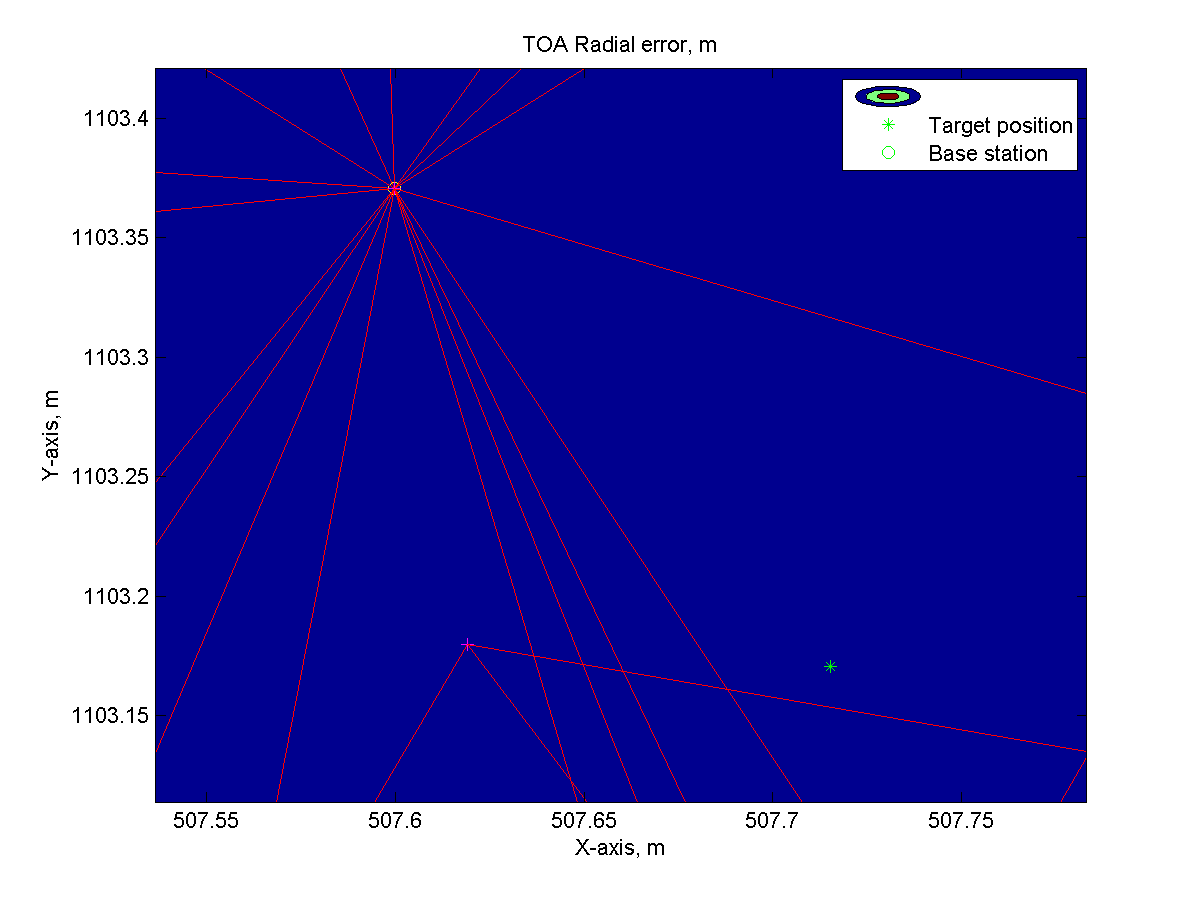 Figura 6 - El área ampliada alrededor de la solución resultante. El círculo amarillo es la solución recibida, la estrella verde es la verdadera posición del objeto.
Figura 6 - El área ampliada alrededor de la solución resultante. El círculo amarillo es la solución recibida, la estrella verde es la verdadera posición del objeto.En el ejemplo anterior, la primera iteración después de una selección preliminar de la posición de búsqueda inicial dio una solución a 20 metros de la posición real (en el campo ~ 600x600 metros).
En esta etapa, descubrimos el método del telémetro, la situación del telémetro de diferencia es un poco más complicada: no existen pautas claras para elegir el punto de partida (el círculo es una buena figura porque está cerrado, y la hipérbola es mala porque llega al infinito).
De vuelta al prometido "GPS submarino" de dos transceptores. En cierto sentido, ciertamente soy astuto: como un GPS subacuático completo, no es posible desde
nuestro primer artículo , pero si
no tiene el dinero para comprar el dispositivo correcto, soporta algunas limitaciones y especialmente se detiene en una cierta gama de tareas, aún puede hacer algo.
Un objeto posicionado con frecuencia está inmóvil (o al menos se mueve despreciablemente lentamente) En tales casos, en lugar de varias estaciones base, realmente puede usar una, pero en movimiento: este enfoque se llama VLBL o base larga virtual. Si no necesitamos arreglar la pista del movimiento del objeto submarino, sino simplemente determinar su ubicación, entonces esto es lo que necesitamos.
A menudo, este problema surge cuando se instala cualquier equipo de fondo por descarga gratuita del recipiente. Con profundidades tangibles y la presencia de corrientes, la posición real del equipo en la parte inferior puede diferir significativamente de la posición del punto donde fue arrojado. Este equipo también puede ser un elemento de la base de navegación inferior: para determinar la ubicación de un objeto submarino, primero debe determinar la ubicación del objeto submarino.
Entonces, ¿cómo se puede arreglar todo esto en el mundo real?
Nuestra configuración experimental consiste en:
- el objeto que ocultaremos en el fondo del depósito: nuestro módem de código RedGTR en una versión independiente (de hecho, solo suena oficial: un módem conectado a una caja de batería sellada); Aquí está en la foto:

Figura 7 - Baliza de respuesta con cartucho de batería
- una estación base móvil basada en un barco cebo chino de nuestro otro artículo . Ella tiene a bordo, además de su relleno de control nativo, un segundo módem RedGTR, un módulo de radio DORJI de 433 MHz con una antena, un módulo GPS / GLONASS casero basado en el quectel l76, su propia placa base basada en el STM32F429 (se puede reemplazar fácilmente con NUCLEO-STM429 o STM32F4 Discovery Estoy seguro de que cualquier placa similar a Arduino también lo haría), que simplemente desempeña el papel de un enrutador: todo va al módem desde el canal de radio a través de UART y viceversa, los datos del módulo GPS también se transmiten al canal de radio.
Entonces se ve como una asamblea:

Figura 8 - Foto del ensamblaje de la embarcación de prueba
Esta vez fijamos una especie de espejo de popa para conectar una caña con un módem, la experiencia de un navegador remolcado libremente reveló la crueldad de tal esquema, tanto en términos de controlabilidad como en términos de la posición relativa cambiante del dispositivo y el barco.
Entonces se ve en la bodega:
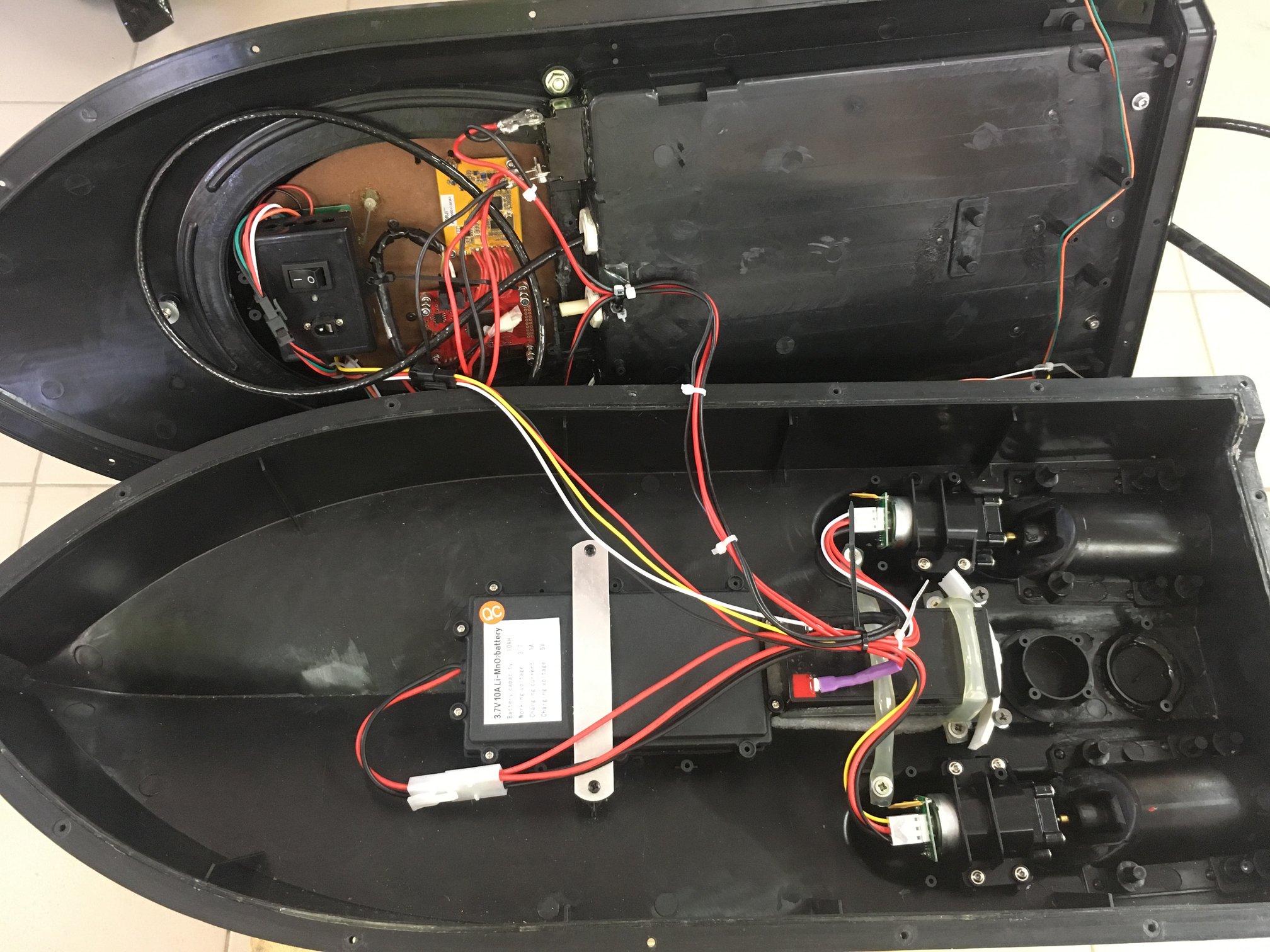
Figura 9 - Foto de una embarcación de prueba. Vista de la bodega
Todos los circuitos nativos permanecieron casi sin cambios, y todo el equipo adicional es alimentado por una batería de plomo separada a 1.2 A * h.
- la consola del operador, que incluye una computadora portátil con software y un módulo de radio de respuesta conectado mediante USB al convertidor. El software es, por supuesto, algo apresurado y solo es adecuado para la demostración, pero ya se ha implementado un protocolo para interactuar con un módem, un solucionador de TOA, basado en el mismo método Nelder-Mead, selección de puntos de base, dibujo simple de ubicaciones geográficas, así como la capacidad de emular GPS para la transmisión de datos a algún análogo de Google Earth.
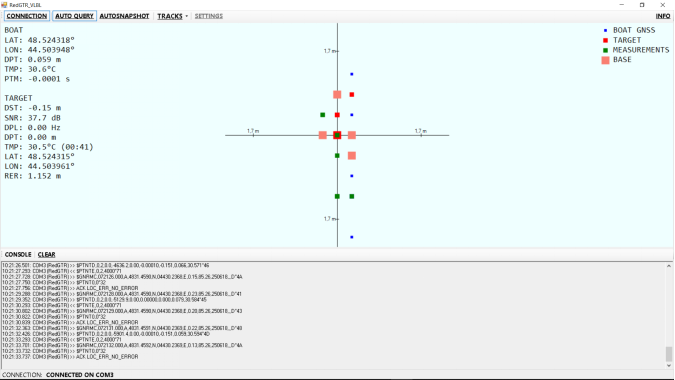
Figura 10 - "Consola del operador". Prueba de funcionamiento sobre la mesa.
Los puntos azules representan la posición GPS del barco, los puntos verdes indican las posiciones donde se tomaron las medidas, las posiciones de los elementos de la base virtual están resaltadas por el salmón, y las posiciones calculadas de la baliza de respuesta se resaltan en rojo.
¿Quién está ocupado con qué?
- el módem que desea encontrar, simplemente se encuentra en la parte inferior, recibe y responde a las solicitudes;
- el módem que está en el barco ejecuta comandos que han llegado a través de UART: envía solicitudes y recibe respuestas, según lo informado por UART
- la placa con STM32F4 en el barco recibe datos del GPS y el módem a través de UART y los redirige al módulo de radio por otro UART, y redirige los datos del módulo de radio al módem; Hay un pequeño matiz asociado con el módulo de radio: no es dúplex completo (como en hidroacústico =), por lo tanto, la placa "retiene" el mensaje RMC del módulo GPS y lo envía solo junto con el mensaje del módem;
- el software de control remoto controla toda la acción, recopila datos sobre distancias al objetivo desde diferentes ubicaciones geográficas, selecciona la base óptima y determina la ubicación del objetivo;
Un poco más detallado
La comunicación con los módems se realiza a través de un protocolo similar a NMEA. Para nuestra tarea, solo se utilizan tres mensajes:
$PTNTE,targetAddr,requestedCmd,timeoutMs*hhdel control remoto al módem. Envíe el comando
targetAddr al suscriptor remoto en
targetAddr , establezca el tiempo de espera de respuesta en timeoutMs.
El comando puede ser cualquiera de la lista aprobada:
| El equipo | Código | Descripción |
|---|
| CDS_CMD_PING | 0 0 | Solicitud de PING a la que el suscriptor remoto responde PONG |
| CDS_CMD_PONG | 1 | Responder a la solicitud de PING |
| CDS_CMD_DPT | 2 | Ordene al suscriptor remoto que transmita su profundidad |
| CDS_CMD_TMP | 3 | Ordene al suscriptor remoto que transfiera su temperatura |
| CDS_CMD_BAT | 4 4 | El comando al suscriptor remoto para transmitir el voltaje de su poder |
| CDS_CMD_USR_0 | 5 5 | Equipo de usuarios 1 |
| CDS_CMD_USR_1 | 6 6 | Equipo de usuarios 2 |
| .. | .. | .. |
| CDS_CMD_USR_34 | 39 | Equipo de usuarios 34 |
El módem admite funciones básicas: ping, profundidad de transmisión, temperatura del agua, energía de la batería y un conjunto de comandos de código de usuario.
El módem responde inmediatamente al comando TNTE sobre el hecho de aceptar el comando o la imposibilidad de ejecutarlo con el mensaje ACK:
$PTNT0,errCodeerrCode - 0 si el módem aceptó el comando; de lo contrario, el código de error
Si el módem no esperó a que el suscriptor remoto respondiera a tiempo, informa esto con un mensaje
REM_TIMEOUT que contiene solo la dirección del suscriptor remoto en el campo de parámetro:
$PTNTB,targetAddrSi el módem recibió la respuesta a tiempo, lo informa con el comando
REM_PONGEX , que tiene el siguiente formato:
$PTNTD,requestedAddr,requestedCmd,receivedValue_decoded,snrd,dpl,pTime,[dst],[dpt],[tmp]requestedAddr : dirección del suscriptor solicitado
requestedCmd - comando solicitado
receivedValue_decoded - valor aceptado
snrd : relación señal / ruido en la salida del receptor en dB
dpl : desplazamiento Doppler en Hz
pTime : tiempo de propagación de la señal (unidireccional) en segundos
dst - distancia al suscriptor en metros
dpt : profundidad propia del módem en metros
tmp - temperatura del agua externa en grados Celsius
Los últimos tres parámetros se transmiten solo si el módem está diseñado con un sensor integrado de presión / temperatura (nuestra opción).
Desde el módulo GPS solo nos interesa el mensaje RMC, de dónde obtenemos la posición geográfica actual (podríamos usar GGA o GLL, el último más corto).
Lo más difícil, la transmisión de datos a través del agua y la medición de la distancia, se realiza mediante módems, determinando la posición geográfica de la embarcación, el módulo GPS, solo queda un poco, para utilizar correctamente estos datos.
Todo el análisis y construcción de mensajes NMEA se realiza utilizando la clase NMEAParser en la biblioteca
UCNLNMEA .
El software de la consola que se ejecuta en la computadora portátil envía periódicamente solicitudes
REM_PINGEX al suscriptor a la dirección especificada en la configuración de la aplicación, lo hace al recibir
REM_TIMEOUT o
REM_PONGEX . En el camino, se registran las coordenadas del barco y se almacenan datos sobre la distancia y la profundidad del abonado remoto junto con las coordenadas del barco en el que se recibieron.
El sentido común (y la experiencia) nos dice que para determinar la posición de un objeto submarino, se necesitan 3-5 estaciones de base virtuales, y como se puede ver en las imágenes de arriba, no deben ubicarse de ninguna manera.
Es decir, se forma la siguiente tarea: a medida que se reciben las mediciones, es necesario seleccionar varias de ellas como elementos de la base de navegación de cierta manera.
Propongo la siguiente opción: elegir tales medidas para que formen la figura más convexa que se describe alrededor de la ubicación estimada del objeto posicionado.
Para hacer esto, tome un cierto punto (en la etapa inicial, cuando no está claro dónde está el objeto posicionado, aparecerá el punto medio de todas las mediciones, que luego se reemplazará por la primera aproximación de la posición del objeto deseado), y calcule el ángulo acimutal desde él (el ángulo entre la dirección hacia el norte y la dirección hacia punto) para cada punto de medición. Y ahora seleccionaremos algunos que cubrirían de manera más uniforme el rango resultante de ángulos. En el control remoto, esto se hace por el método
List<Measurement> Measurements.GetBase();
A medida que llegan los datos, en el método donde se analiza el mensaje REM_PONGEX, agregamos medidas e intentamos construir una base de navegación y resolver el problema de navegación con él. El método es responsable de esto.
GeoPoint3DWE LocateLBL_NLM(List<Measurements> base, GeoPoint3DWE prevLocation, double rErrorThreshold, out double stStageRErr, out int itCnt);
La base misma se transfiere a ella: el conjunto de medidas que seleccionamos para resolver el problema de navegación, la posición anterior (si la hay, la profundidad del objeto deseado también se transmite allí), el umbral de error radial y dos parámetros de salida de diagnóstico: el error radial en la primera etapa de la solución (de acuerdo con optimización unidimensional) y el número de iteraciones, después de lo cual se obtuvo la solución en la segunda etapa.
Si la solución con la que estamos satisfechos se debe a un error radial, entonces usaremos esta solución como punto de referencia para construir la base.
Y así, hasta que nos cansemos, obtendremos una solución que nos satisfaga.
El método
LocateLBL_NLM , como su nombre lo indica, resuelve el problema
utilizando el método Nelder-Mead , realizando previamente una optimización unidimensional si no hay una solución previa. En realidad, es posible que no esté atado al resultado anterior, pero aplique la optimización unidimensional constantemente: la estrategia puede ser diferente y depende de condiciones específicas.
Para simplificar, la solución se realiza en metros, para lo cual, antes del inicio de la solución, todas las coordenadas se transfieren al sistema local, con el origen en el punto medio de la base de navegación. Después de resolver, el resultado se traduce nuevamente a la longitud y latitud geográficas (la longitud es X y la latitud es Y). Para traducir grados a metros y viceversa, la clase de Navegación contiene los métodos GetDistance2DDeg y Meters2Deg.
Pero, como saben, una teoría sin práctica está muerta, y es hora de pasar a los resultados de los experimentos de campo.
Revivamos la teoría con verificación práctica
Según la antigua tradición, realizamos pruebas en la
desembocadura del río Pichuga . Es un lugar conveniente, hay profundidades de hasta casi 30 metros y un área de agua bastante complicada.
El faro del acusado está montado en un "soporte" de vástago especial (los balcones de espuma de espuma y un ancla que ayudan a que toda la estructura se mantenga erguida no se incluyeron en el marco):
 Figura 11 - Contestador de baliza "Estación inferior"
Figura 11 - Contestador de baliza "Estación inferior"La instalación del faro se filmó en
video , no se calcularon un poco con la luz y se olvidaron de llevar una linterna con ellos, de modo que el momento de contacto con el suelo permaneció oculto en la oscuridad.
Mientras estaban a punto de probar, le dieron un nombre al bote:
 Figura 12 - "Palych" en el entorno natural
Figura 12 - "Palych" en el entorno naturalEn el espejo de popa "Palychu", los lazos de nylon aseguraron una pieza de la caña de pescar, en la que se encuentra el módem RedGTR (para no pasar el rato y saltar).
El experimento consistió en el hecho de que la baliza del acusado está instalada en la parte inferior, solo un pequeño flotador sobresale de ella, mientras "Palych", controlado desde la orilla, camina alrededor del área del agua en grandes círculos, el control remoto periódicamente le pide algo al acusado, por ejemplo, su profundidad . Todos los datos se escriben en el registro, y todo se muestra en la pantalla de acuerdo con el estado real de las cosas. Así:
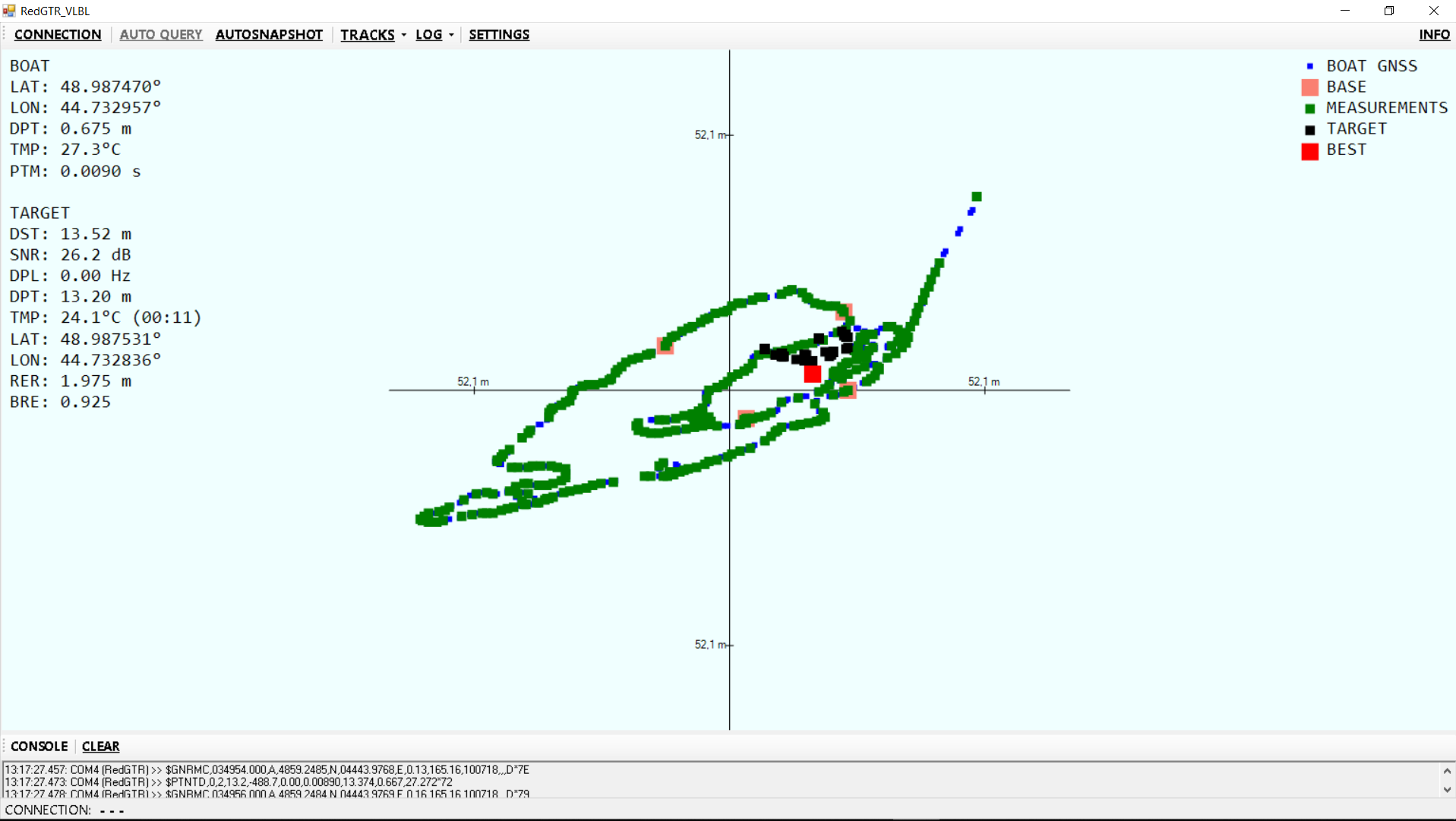 Figura 13: captura de pantalla del software de control remoto con la trayectoria de la embarcación y las posiciones calculadas de la baliza de respuesta (la mejor posición calculada se muestra en rojo)
Figura 13: captura de pantalla del software de control remoto con la trayectoria de la embarcación y las posiciones calculadas de la baliza de respuesta (la mejor posición calculada se muestra en rojo)Como se puede ver en la Figura 13, el faro estaba ubicado a una profundidad de 13.2 m, y la temperatura del agua a esta profundidad era de 24.1 ° .
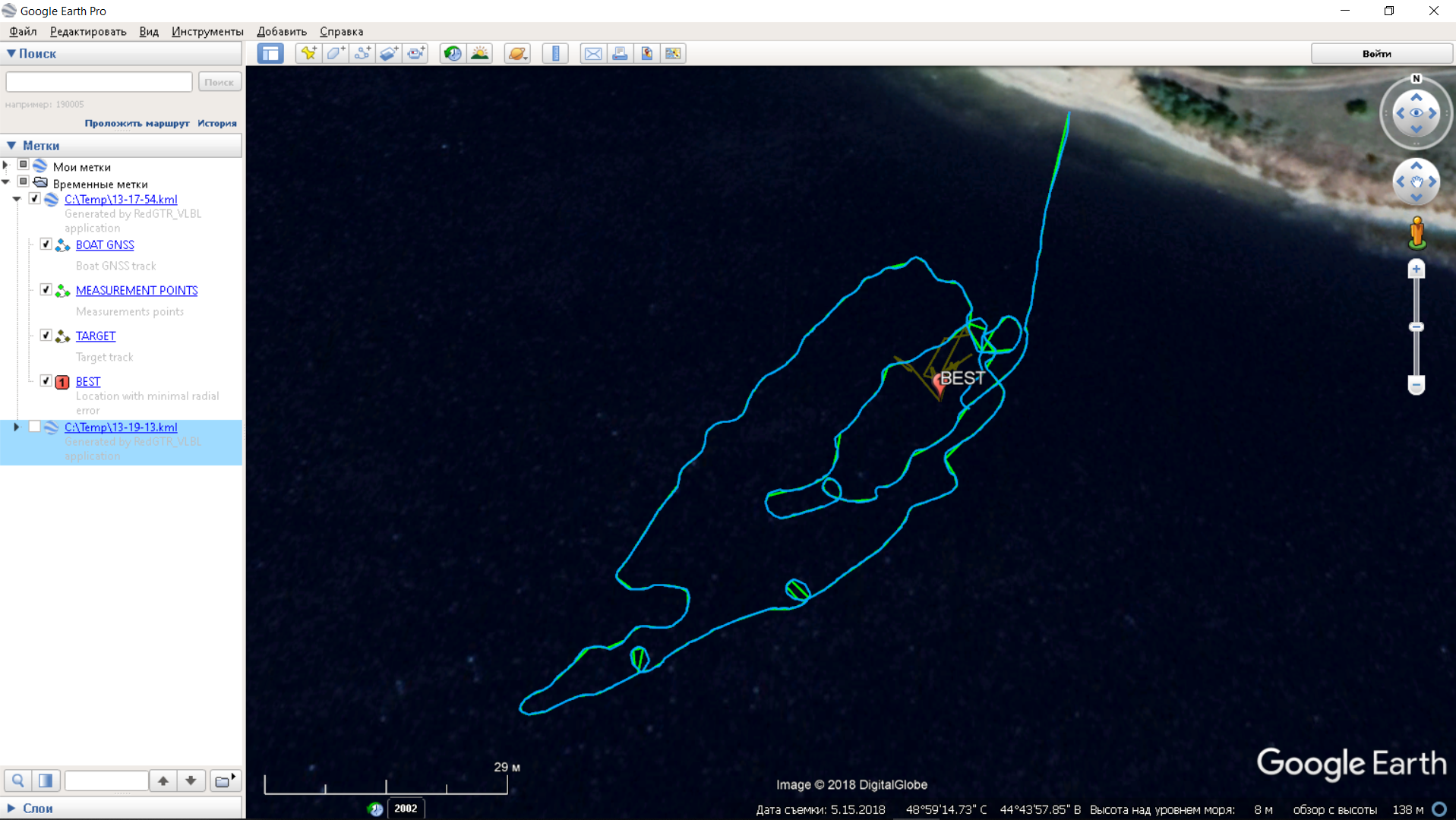 Figura 14: Importar pistas recibidas en GoogleEarth
Figura 14: Importar pistas recibidas en GoogleEarthObtener un buen resultado en este caso tomó unos 15 minutos de natación desde la fuerza.
En el segundo experimento, el faro se instaló a una profundidad de 16.5 metros, donde se esperaba algo más frío, solo 22.6 ° C.
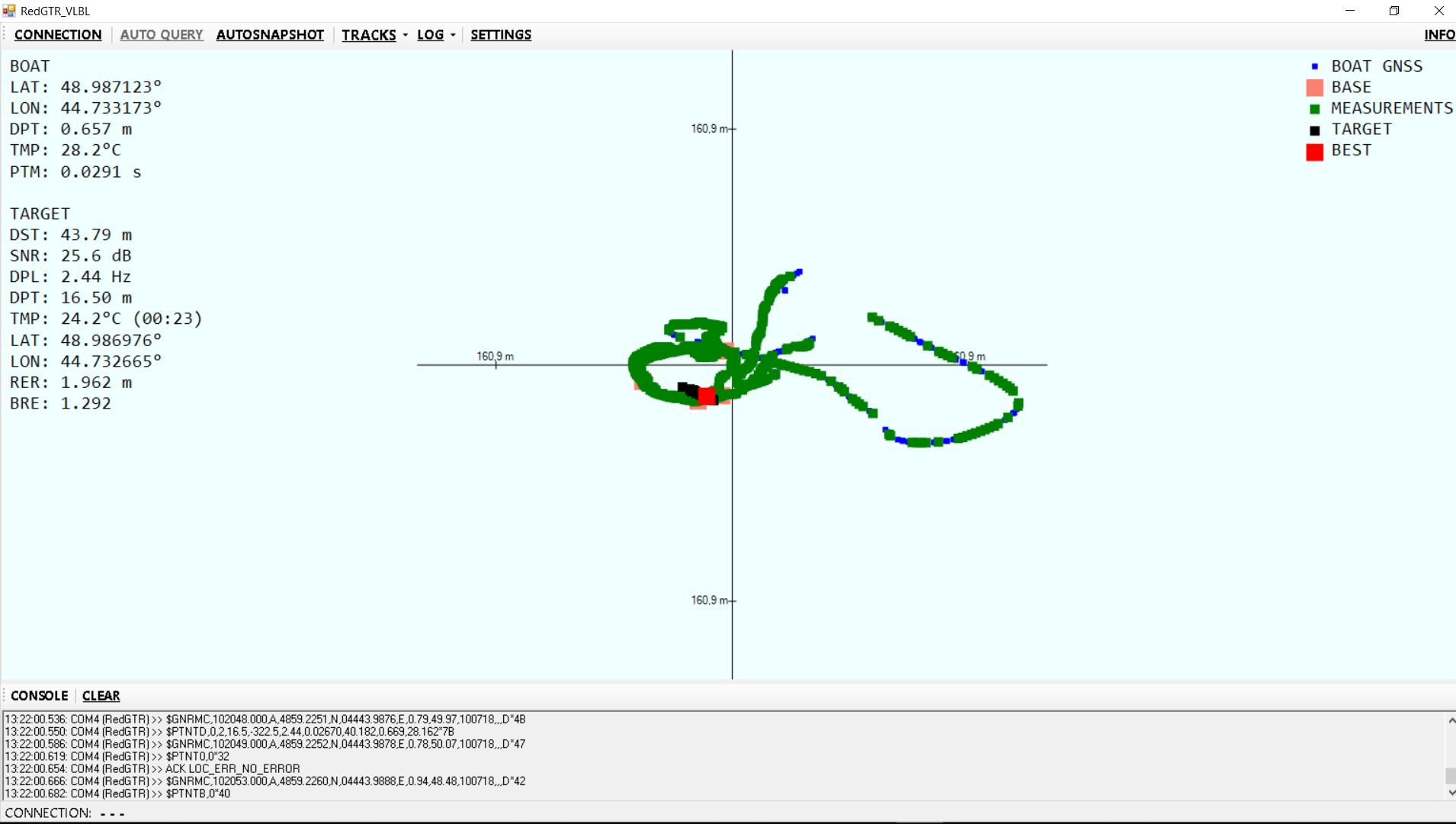 Figura 15: el resultado de determinar la ubicación de la baliza de respuesta en el segundo experimento en la pantalla del software de control remoto
Figura 15: el resultado de determinar la ubicación de la baliza de respuesta en el segundo experimento en la pantalla del software de control remotoEn este caso, no tratamos con la evaluación correcta de la precisión debido a la aguda falta de tiempo (de hecho, estas pruebas divertidas causaron cierta fricción entre la administración, porque fueron retiradas del trabajo), y quedamos satisfechos de que cuando el barco fue al flotador (este momento se puede ver en la
primera track ), luego, en términos de su posición, coincidió completamente con la mejor solución, y la distancia coincidió con la profundidad (con la diferencia entre las profundidades del respondedor y el módem instalado en el barco). Se corrigieron los puntos en los que se reiniciaron las balizas, y la discrepancia entre la posición calculada y los puntos de descarga está en la región de 2-3 metros, lo que además confirma la operatividad del sistema.
En general, podemos decir que esta prueba de concepto se ha completado con éxito.
¡Recibimos verdadero placer y quemaduras solares, estaremos encantados de responder preguntas y escuchar críticas!
Epílogo
El hecho triste es que los módems utilizados en este experimento, aunque son muy baratos según los estándares del mercado mundial para la comunicación hidroacústica, aún no son muy accesibles para los aficionados.
Para no ser infundado, daré un enlace al
excelente trabajo de la señorita Benson, que en la página 54 del PDF o 36 de la numeración del documento tiene una placa interesante con precios para algunos módems de sonda a partir de 2010. Tales cosas (Hay un pequeño error en la tabla: el rango de comunicación de alcance para el módem que está desarrollando se indica en metros, mientras que el encabezado de la columna es km).
La buena noticia es que de repente desarrollamos módems que pueden hacer casi todo de la misma manera (un poco más pequeños (de hecho, los más pequeños del mundo, y antes de ellos, los más pequeños también eran nuestros). , menor velocidad de transmisión), y según nuestras estimaciones, ya son bastante alentadores para los entusiastas adinerados. Por el momento, la electrónica y el firmware están completamente listos, y estamos completando la solución del caso. Al final del desarrollo, publicaremos un artículo con los resultados de una verificación experimental.
Atencion Encuesta