
O una aspiradora con control Bluetooth
En el proceso de creatividad técnica, no solo se obtienen todo tipo de cosas útiles y no muy útiles, sino también muchas virutas diferentes, aserrín y otra basura. Y esta basura debe eliminarse tanto durante el aserrado como después. A continuación, le contaré sobre mi solución a este problema y, por un lado, mostraré un proyecto de control remoto para dispositivos con un regulador de pulso de fase.
Para empezar, elegí una aspiradora adecuada para limpiar las virutas, incluido el metal. Las aspiradoras con bolsa se cayeron inmediatamente. Debido a que las virutas de metal y otras piezas de hierro rasgarán rápidamente una bolsa de papel, y no la sacudirá de una bolsa de tela. La elección recayó en una aspiradora con un filtro de ciclón (contenedor) y un filtro de espuma después. Esto es conveniente Simplemente vierte las virutas del vidrio y a veces lavas el caucho de espuma. Con él, me di cuenta de la succión de las virutas en un molino manual directamente desde debajo del molino durante la operación. Esto mejora en gran medida la visibilidad, reduce la expansión del chip y mejora la calidad, porque el chip no interfiere con el proceso y el cortador no se pega. El control de la aspiradora fue a través de un enchufe con un relé sincronizado con el encendido de la máquina.
 Clickable
ClickablePero luego no fue suficiente. E hice un gran ciclón con un tanque de 20 litros.
 Clickable
Clickable¡Esto es algo genial!
- Este es el ciclón mismo. Crea un torbellino de aire y el polvo / suciedad se emite por la fuerza centrífuga en el tanque 2
- El tanque debe estar absolutamente apretado y tener paredes fuertes para que no sea aplastado por el vacío. Debe tener una tapa extraíble para sacudir los escombros.
- La base de los rodillos hace que sea conveniente desplazarse por el taller hasta diferentes máquinas o al limpiar.
Una fuente de succión para el ciclón es una aspiradora. Ahora cualquiera. Debido a que el ciclón recoge el 99% de la basura y la aspiradora necesita limpiarse muy raramente. El ciclón no se adapta bien al polvo fino, que casi no tiene masa (por ejemplo, polvo de concreto), pero este no es nuestro caso. No soy un constructor. Pero el aserrín después de un rompecabezas eléctrico ya está dentro de su poder y virutas de metal por sí mismo.
Compré un ciclón (1) en una tienda en línea china.
Robé un barril de pegamento tóxico
del almacén de Soyuzmultfilm junto con un caballo morado y un snusmumrik verde de una empresa familiar.
Apoyó el soporte de rodillos por su cuenta.
Todo parece ser genial, pero hubo un problema. Si miras cuidadosamente la foto,
puedes ver la alfombra antigua del siglo XVI, se puede ver que los controles de la aspiradora permanecieron en el mango, que está atascado a la salida del ciclón. Y la manguera con la que está trabajando no está conectada a la aspiradora y no la controla. Sin embargo inconveniente! Que hacer Será terriblemente inconveniente tirar de los cables; te enredarás en ellos, te caerás y te romperás todo lo que sea posible e imposible.
¡Debemos crear un control de radio!
Afortunadamente, todavía tengo un mango de la vieja manguera rota. Por cierto, esta también es una idea para reparar una manguera con un control. Se puede suministrar cualquier manguera y el control se puede hacer por radio. Lo principal es guardar el asa con el botón.
También tengo la idea de integrar los módulos de radio en las máquinas, donde uso la succión de chips (fresado CNC y convencional) e integrar el control de succión en el panel de la máquina. Y en el caso de CNC, será posible establecer la succión mediante programación desde el código G. Y no lo conecte a un enchufe con un relé.
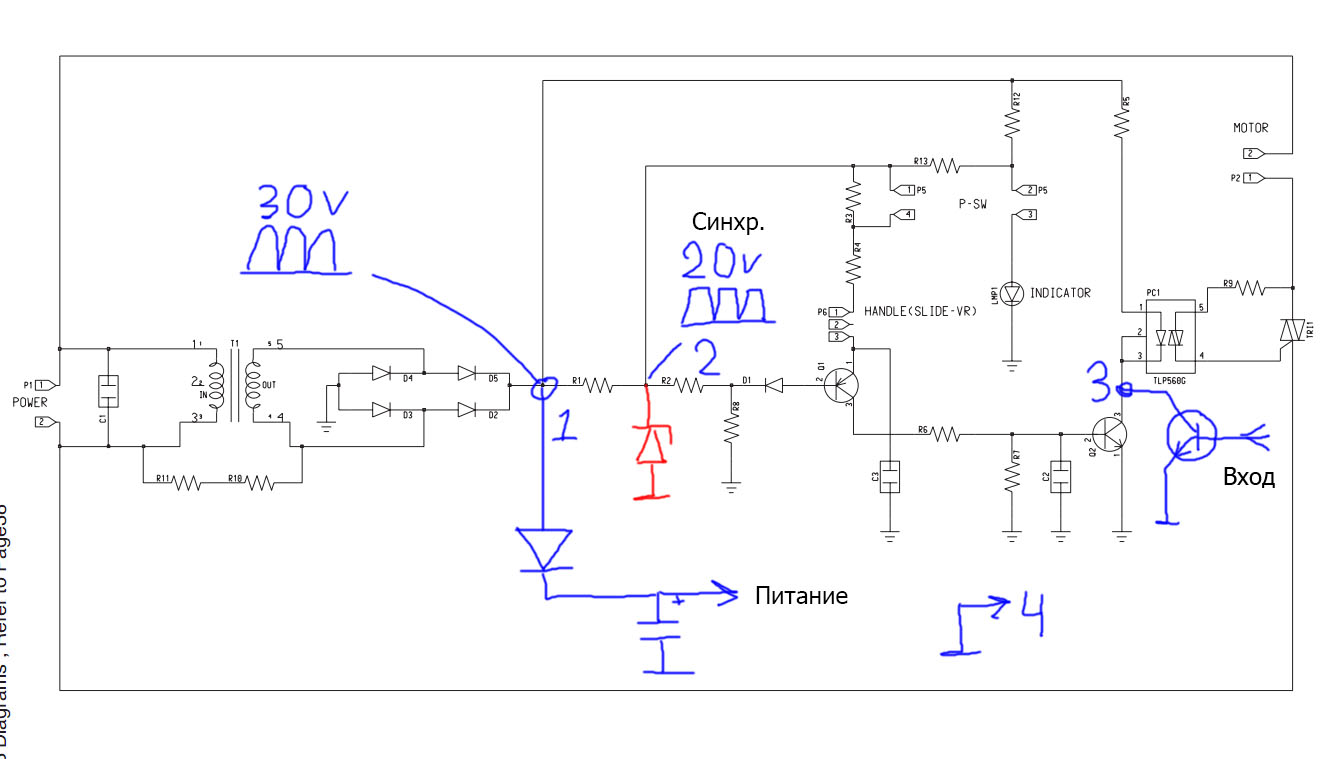
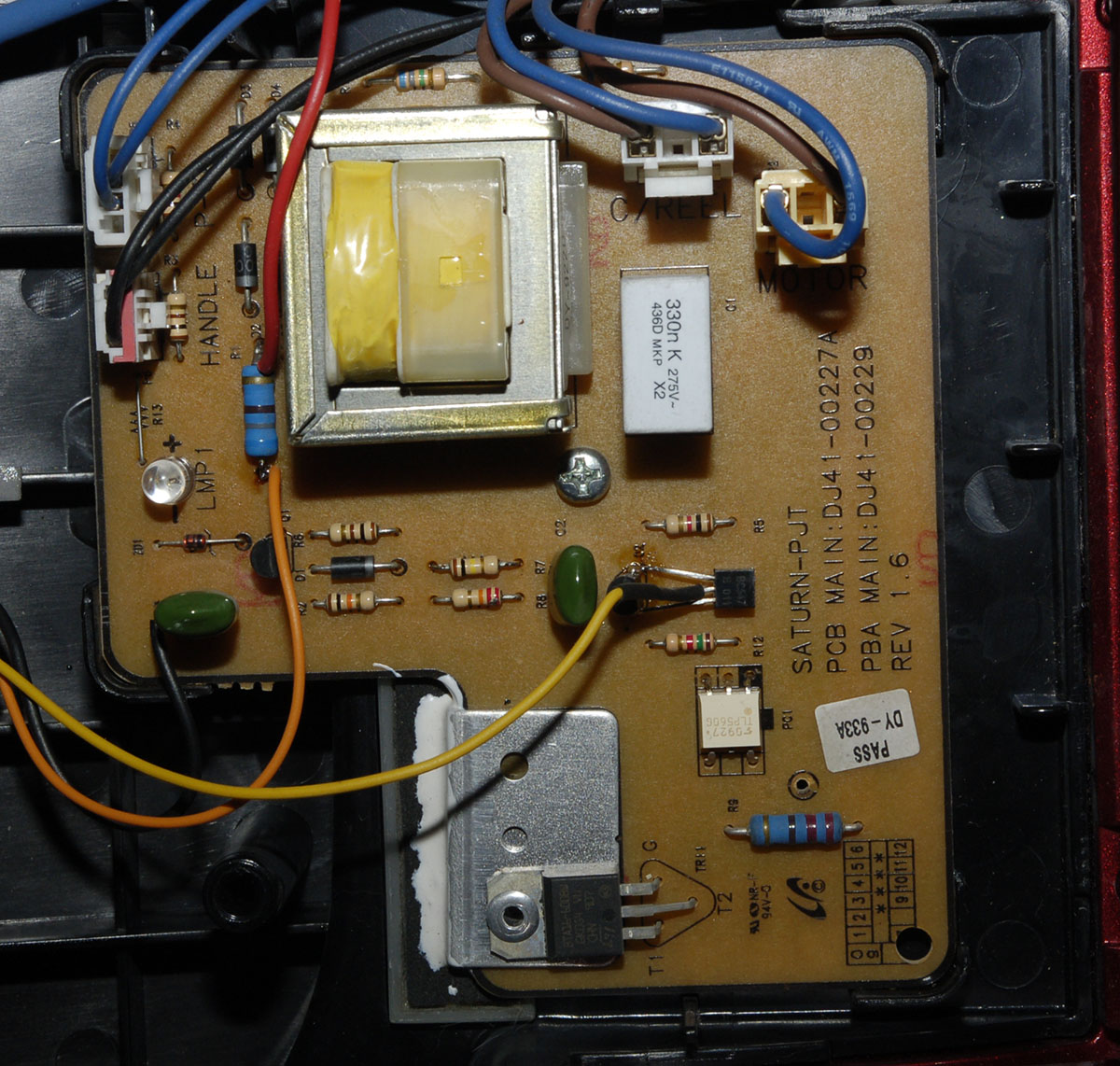
Apenas dicho que hecho. Considere el esquema de mi aspiradora Samsung:
 Clickable
Clickable¿Qué vemos aquí?
El fabricante no suministró 220 voltios al mango para que la corriente eléctrica no matara al menor, e hizo un transformador y aislamiento galvánico. Es agradable cuando te cuidan. Y desde la parte de bajo voltaje, puede llevar comida para el "cerebro". El motor se controla a través de un triac y se abre con un optoacoplador. Los diseñadores de circuitos de diodos zener rojos simplemente olvidaron :)
Me gustaría cortar el circuito para no arruinar la funcionalidad nativa. Deje que la aspiradora funcione como un hogar normal.
Sacamos conclusiones:
- Tendremos que hacer un control PWM y sincronizarlo con la red. Simplemente cambiar el voltaje o algo así no funcionará.
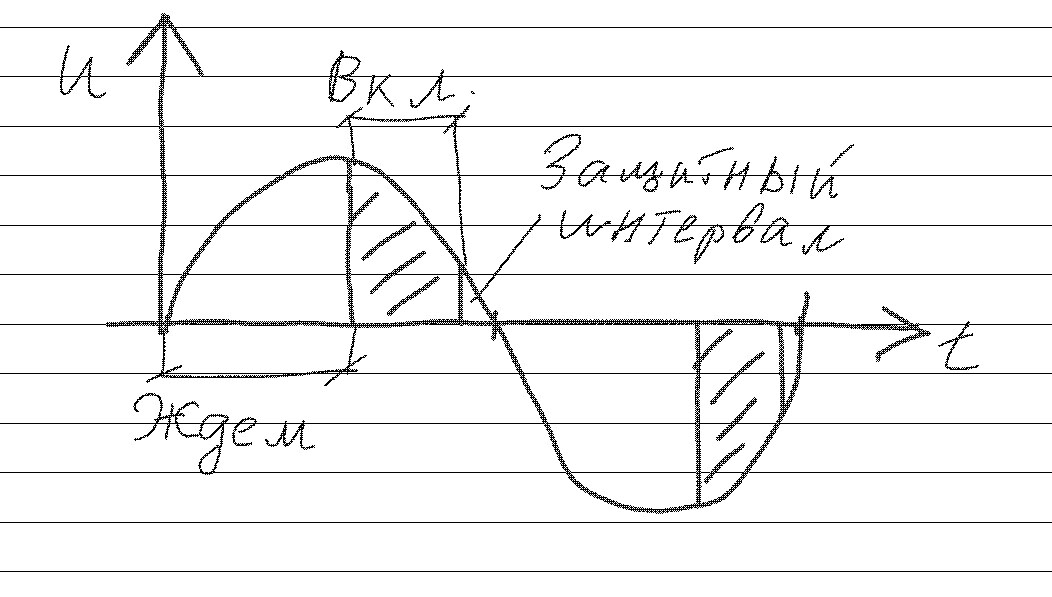
- Desde el control del triac, PWM tendrá que comenzar desde el final del medio ciclo de la tensión de red para que el triac se cierre al pasar por 0 y se abra cuando lo necesitemos.
- Necesitamos un intervalo de protección para poder eliminar la iluminación del optoacoplador antes de pasar nuevamente por 0 para que el triac se cierre y no se abra al comienzo del próximo medio ciclo.
- Es necesario que el motor esté garantizado para arrancar y que las escobillas no se quemen. No puede iniciar PWM con un ciclo de trabajo cero. Porque el motor necesita superar la fricción y está garantizado para arrancar. Se necesita un ciclo de trabajo mínimo y debe medirse.
- Para alimentar el "cerebro" tendrá que usar un convertidor pulsado. La potencia de los "cerebros" es de 3.3v y la salida del transformador es de 30v. Disipar tanto en el calor no es humano, especialmente porque el trance es pequeño y se calentará.
Decidí "chocar" en el circuito de esta manera:
Desde el punto 1 tomamos comida. Pero a través del diodo! Porque el voltaje de ondulación es necesario para el funcionamiento del circuito nativo.
Desde el punto 2, eliminamos el pulso de sincronización con la red.
En el punto 3, también conectamos un transistor, con el cual abriremos el optoacoplador con una señal del controlador.
Bueno, la tierra 4 tampoco nos hará daño.
 Clickable
ClickableMediante el método de empuje científico con un osciloscopio en la mesa de trabajo, medí que el ciclo de trabajo mínimo para un arranque confiable del motor debería ser del 20%. Y el intervalo de protección antes de pasar por 0, decidí hacer el 5% del medio período de la red, es decir, 0.5 millas por segundo. Será necesario programar el controlador para que haga algo como esto:
Para implementar la conexión de radio, pedí en China tales módulos Bluetooth penny SPP:
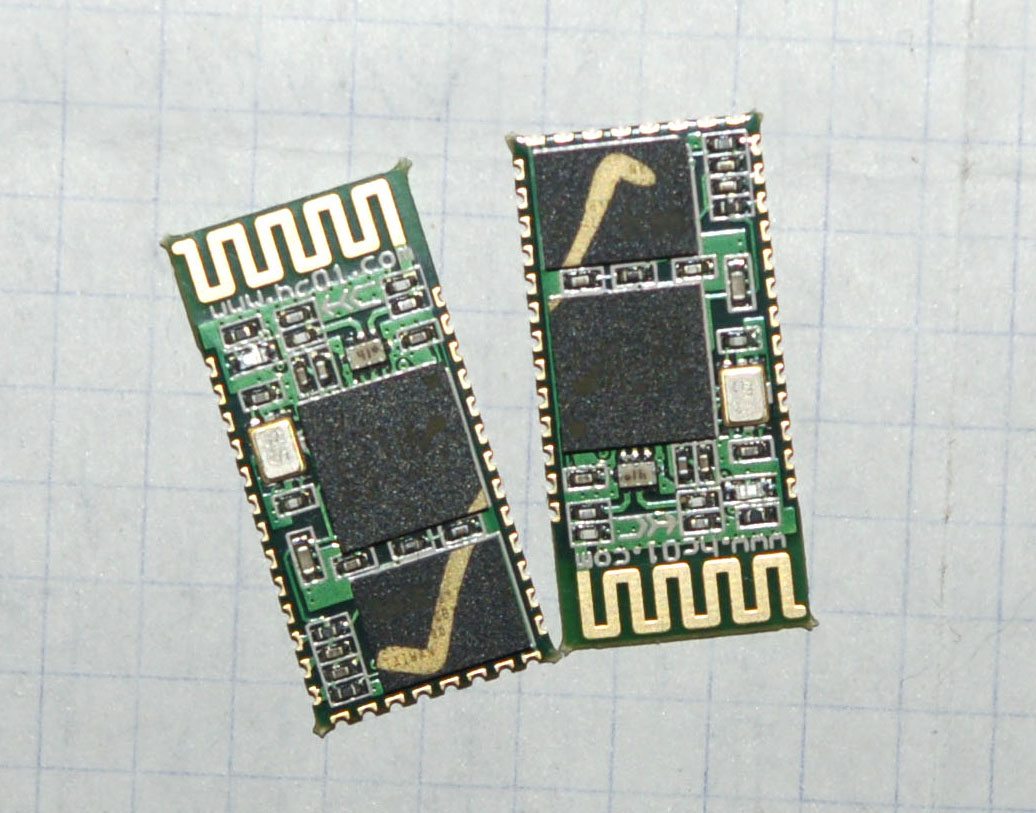
Se llaman HC-05
Pueden ser configurados tanto por el receptor como por el transmisor. Están configurados por comandos UART AT. El proceso se describe en muchos lugares. Creo que no debe detenerse en él y la hoja de datos para estos módulos está en la red.
No configuré el PIN estándar del receptor para protegerlo contra conexiones de terceros, pero bloqueé el transmisor a una dirección fija del receptor para que no se pudiera conectar con nada. En general, protegió el dispositivo de lazos perversos :)
La velocidad elegida por 9600 es más que suficiente. Mega habría tenido suficiente cerebro para esto. Encendido los módulos, verificado. Se conectan sin comandos adicionales y el terminal verificó que las letras de un módulo vuelan a otro. Me di cuenta de cuál de ellos fue el que lo pospuso hasta que el resto de los despojos estuvo listo.
Todo, estoy cansado de escribir y nadie leerá artículos largos.
¡Ya es viernes! Y es hora de comenzar a celebrarlo, ¡lo que deseo a todos!
En la siguiente parte, mostraré la implementación dura del receptor y el transmisor, contaré cómo vi la placa de circuito en el enrutador.