Introducción
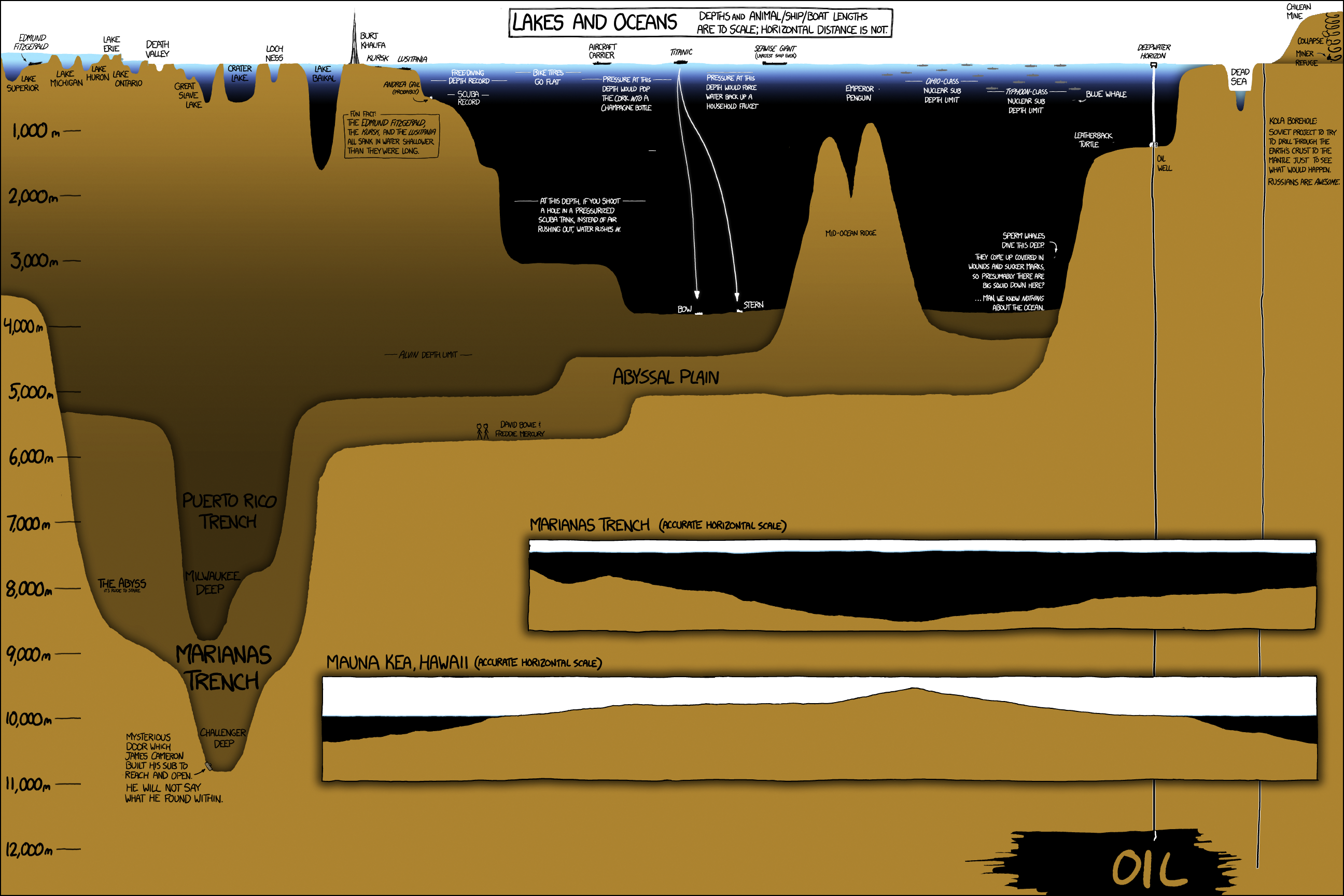
La superficie del planeta está aproximadamente cubierta en un 71% por los océanos (unos 361 millones de km²). El área de la Federación Rusa es de aproximadamente 17 millones de km. La profundidad de los océanos es desigual, se distinguen las siguientes zonas:
Estante (estante - estante) - profundidad hasta 200-500 m;
Pendiente continental - profundidad hasta 3500 m;
Fondo oceánico - profundidad hasta 6000 m;
Canales de aguas profundas: profundidad por debajo de 6000 m.
La profundidad promedio también difiere:
Atlántico - 3600 m
Indio - 3890 m
Ártico Ártico - 1225 m
Tranquilo - 4250 m
¿Por qué un hombre se arrastra debajo del agua?
Históricamente, primero para alimentos (pescado, mariscos, artrópodos, algas). Luego, para trabajos de ingeniería (construcción de estructuras hidráulicas, operaciones militares). Recientemente, para la construcción de instalaciones lineales (tuberías (gas, petróleo) y cables submarinos) y minería (gas, petróleo, nódulos de ferromanganeso). Para los humanos, el océano es peligroso, pero útil como fuente de bien.
Cómo el hombre conquistó las profundidades
Holding Diving
Si los buzos de perlas y otras ostras estuvieran en todo momento, entonces el buceo a profundidades considerables se hizo posible en los tiempos modernos. Para ser justos, es necesario tener en cuenta las profundidades récord de buceo de los buceadores libres [1]:
Buceo de peso constante con retención de la respiración:
Hombres - 129 m (Alexey Molchanov, 2016-10-28)
Mujeres - 104 m (Alessia Zecchini, 2017-05-10)
UPD:
Hombres - 130 m (Alexey Molchanov, 2018-07-18)
Mujeres - 107 m (Alessia Zecchini, 2018-07-26)
Desde el sitio web de AIDA .
Sin límites:
Hombres -
253,2 m (Herbert Nietzsc, 2012-06-06)
UPD:
AIDA no contó el intento.
Hombres -
214 m (Herbert Nietzsc, 2007-06-14)
Desde el sitio web de AIDA .
Mujeres -
160 m (Tanya Streeter, 2002-08-17)
También es necesario comprender que para lograr tales resultados, las personas dedican toda su vida a la capacitación, mientras que muchas mueren en un intento de romper el récord.
Usando los logros de la ciencia y la tecnología para trabajar en profundidad

Máquina de buceo Lesbridge
En 1715, el inglés John Lesbridge construyó un vehículo submarino, que ya era el prototipo de un traje duro moderno. Un hombre fue colocado en un cilindro de metal con tapa. Había tres aberturas en el cilindro: dos para las manos y una tercera, un orificio de inspección en el que se insertó el vidrio. Según las descripciones, el inventor descendió a una profundidad de 24 my pasó bajo el agua durante hasta 34 minutos. Usó una máquina para aumentar los valores después de un naufragio.
Traje de buceo pesado
Podemos destacar aún más el año 1819, cuando el primer traje de buceo pesado fue presentado por Kristian August Sieb, cuyas diversas modificaciones todavía se usan en la actualidad.
Por ejemplo, un abrigo de tres tornillos: este equipo de buceo estándar se ha utilizado en la Armada rusa y la flota civil desde el siglo XIX hasta nuestros días. Están equipados con estaciones de buceo de barcos de buceo de mar y de incursiones, embarcaciones de rescate y remolcadores. No aísla al buzo de la presión ambiental (agua). Equipado con intercomunicador.
El récord de buceo en el traje de buceo pesado que se encontró fue de
317 metros [2]. Como parte del desarrollo de elementos de la tarea del curso K-2 (la operación de un solo barco en el mar para su propósito previsto), los especialistas en buceo del buque de rescate Igor Belousov de la Flota del Pacífico de la Armada rusa en el rango de entrenamiento de aguas profundas primero hicieron un descenso experimental en una campana de buceo a una profundidad de 317 metros con acceso al suelo.
Con base en los resultados de descensos experimentales a profundidades de hasta 305 m, el ACC de la Armada y el comando de la Armada llegaron a la conclusión de que, para garantizar la seguridad de los buzos, la profundidad del descenso debe limitarse a 200 m para descensos que utilizan inmersiones a corto plazo, ya que los buzos a grandes profundidades permanecieron físicamente inviables, y ese rescate independiente de buzos desde un submarino hundido por el método de escalar la flota desde profundidades de más de 200 m es imposible [3].
Una vez más, tales profundidades están disponibles después de un entrenamiento extenso y el uso de cámaras de presión para la descompresión.
Aparato de Henry Fluss
A continuación, puede resaltar el aparato Henry Fluss de la patente de 1878, que puede llamarse SCUBA.
Equipo de buceo
En 1945, Jacques-Yves Cousteau junto con el equipo de buceo de patente Emil Gagnan. El equipo de buceo ahora es utilizado por la mayoría de los entusiastas del buceo, buzos profesionales y socorristas.
Equipo de buceo: 1 - Manguera, 2 - Boquilla; 3 - Válvula (caja de cambios); 4 - correa para el hombro; 5 - escudo trasero; 6 - Tanque (botella de gas)
El registro de buceo actualmente pertenece a Ahmed Gabr. Se las arregló para llegar a
332.4 metros debajo de la superficie del agua del Mar Rojo cerca de la ciudad de Dahab. Toda la inmersión tomó 14 horas (el ascenso probablemente duró al menos 10 horas).
Y nuevamente, dichos registros requieren una larga preparación, una cámara de presión y un gran equipo de soporte.
¿Cuál es la profundidad máxima a la que una persona puede sumergirse, experimentando el efecto de la presión de una columna de agua a esta profundidad?COMEX
534 m en aguas abiertas 1988, Marsella, Francia [4], utilizando una mezcla de respiración COMEX Hydra 8 (49% de hidrógeno, 50% de helio, 1% de oxígeno) para un total de 6 personas (4 buceadores COMEX, 2 de la Armada francesa). En los primeros 8 días en la cámara de presión, un aumento gradual de la presión a 53 atmósferas. Además, los 6 buzos trabajaron a profundidades de 520 ma 534 m. Una vez que se realizó un ejercicio para conectar las tuberías. Después de cumplir con las tareas planificadas, los buzos se sometieron a descompresión en una cámara de presión durante 18 días.
701 m en la cámara de presión experimental 1992, Marsella, Francia [5]. Registro de experimento:
- 4 semanas de período preparatorio antes de la "inmersión"
- Aislamiento de dos días a una profundidad de 10 m.
- 13 días para alcanzar una presión correspondiente a una profundidad de 675 m utilizando una mezcla de respiración COMEX Hydra 8 (49% de hidrógeno, 50% de helio, 1% de oxígeno).
- 3 días en presión entre 650 my 675 m
- Luego, uno de los buzos, Theo Mavrostomos, entró en una cámara de presión separada y continuó buceando a una profundidad de 701 m con la mezcla de respiración COMEX Hydro 10, donde permaneció durante 7 horas.
- Luego 24 días de descompresión.
- Y 2.5 meses de observación de los participantes en el experimento.
Aparentemente, la presión a una profundidad de más de 700 metros usando una mezcla de gases para respirar es extrema.
Hay estudios sobre tecnología de respiración líquida. Para esto, se usa perfluorocarbono líquido con oxígeno y dióxido de carbono disuelto en él en los experimentos. A la fecha de publicación, se están realizando experimentos en animales de laboratorio.
Aquí vale la pena recordar las profundidades promedio de los océanos desde 1250 ma 4250 m.
Trajes de buceo rígidos
La siguiente rama para conquistar las profundidades es la creación de disfraces que mantengan la presión atmosférica normal para una persona y la protejan contra la presión ambiental.
Según GOST R 52119-2003: un traje de buceo rígido está diseñado para operaciones de observación y buceo bajo el agua por un operador bajo presión interna normal (técnica de buceo. Términos y definiciones).
Equipo destinado a operaciones en aguas profundas (hasta 600 metros), durante el cual la presión atmosférica normal actúa sobre el buzo, lo que elimina el problema de descompresión y elimina el nitrógeno, el oxígeno y otras intoxicaciones. Históricamente, se pueden distinguir los siguientes productos:
Traje de buceo hermanos Karmagnol
Traje de buceo con 20 pequeños ojos de buey de Alphonse y Theodore Carmagnol, Marsella, Francia, 1878. Se suponía que el traje espacial podía sumergir a una persona de manera segura a una profundidad de 60 m. Sin embargo, nunca trabajó como debería y se filtró constantemente. Ahora ubicado en el Museo de la Armada francesa.
Disfraces "Neufeld y Kunke"
Tres generaciones de trajes de buceo de la compañía alemana Neufeld y Kunke, 1917-1940.
El traje de tercera generación (fabricado entre 1929 y 1940) le permitió bucear a una profundidad de 160 metros y estaba equipado con un teléfono incorporado. El desarrollo de la compañía "Neufeld y Kunke" formó la base de un traje espacial rígido del italiano Roberto Galeazzi a principios de los años 30 del siglo pasado, incluida la adopción de la flota militar del recién formado estado soviético.
Sub-1 hombre
1933, Mini submarino para una persona. El traje permite al buzo trabajar durante un tiempo considerable a una profundidad de 300 metros sin un largo proceso de descompresión.
Traje de jum
Traje de JIM 1974, traje duro. El traje espacial se usó en los años 70 del siglo pasado en la industria petrolera. En 1979, una buceadora, Sylvia Earle, estableció un récord mundial en este traje espacial. Bajó 381 metros y caminó por el fondo del mar durante dos horas y media.
Traje de neopreno
1985, desarrollo dirigido por Phil Newten. Probado a una profundidad de 900 m, certificado a una profundidad de 300 m.
Exosuit
Exosuit es un traje de dos metros y 240 kilogramos de aleación de aluminio, que permite a una persona trabajar a una profundidad de hasta 305 metros. Para aumentar la movilidad y ayudar a los brazos y piernas humanos débiles, el Exosuit está equipado con 4 motores de propulsión de 1.6 hp. (con posibilidad de aumentar a 8), así como 18 articulaciones que proporcionan movilidad de las manos. Las "mangas" del traje espacial se pueden equipar con varias boquillas intercambiables: pinza, cortador, taladro, etc.
Una característica de Exosuit es su soporte vital totalmente autónomo, mientras que la mayoría de las naves suministran oxígeno y electricidad a la mayoría de los trajes espaciales submarinos similares. Exosuit tiene un sistema de recuperación de oxígeno que limpia el aire de dióxido de carbono y lo repone con oxígeno. El sistema tiene una autonomía de 50 horas. En Exosuit, una persona respira aire atmosférico normal bajo presión normal, lo que elimina riesgos innecesarios y un largo procedimiento de descompresión. Exosuit vale $ 1.3 millones.
Sistema de buceo atmosférico (ADS 2000)
ADS 2000 se desarrolló en conjunto con OceanWorks International y la Marina de los EE. UU. En 1997 para cumplir con los requisitos de la Marina de los EE. UU. Carcasa de aleación de aluminio forjado T6061, diseño giratorio avanzado. Capaz de trabajar a una profundidad de 610 m durante 6 horas, cuenta con un sistema autónomo de soporte vital automático. Un sistema de doble dirección integrado permite al piloto navegar fácilmente bajo el agua. Fue certificado por la Marina de los Estados Unidos el 1 de agosto de 2006, cuando el Jefe de Buceo de la Marina, Daniel Jackson, se hundió a una profundidad de 2,000 pies (610 m).
Incluso con el uso de trajes espaciales, una persona puede bucear a una profundidad de 610 m.
¿Pero qué hay de los submarinos?
Los submarinos modernos te permiten bucear a una profundidad de aproximadamente 600-650 m.
 Clickable
ClickableEl submarino nuclear soviético Komsomolets sigue siendo el poseedor absoluto del récord de buceo máximo, en 1985 el submarino alcanzó una profundidad de 1027 metros debajo de la superficie del mar. El valor de trabajo para ello fue de 1000 m, y el valor estimado fue de 1250 m. El destino de los submarinos posteriormente se desarrolló trágicamente. Komsomolets se hundió en 1989 debido a un severo incendio que comenzó a una profundidad de unos 300 metros. Y aunque él, a diferencia del mismo Thresher, logró aparecer, la historia aún resultó ser muy trágica.
Las batiscafas se desarrollaron para sumergir a las personas a profundidades de más de 600 metros.
Batiscafo
FNRS-2 y FNRS-3
FNRS-2 fue el primer batiscafo creado por Auguste Piccard, Suiza. El trabajo en la creación de un batiscafo comenzó en 1937 y fue interrumpido por la Segunda Guerra Mundial. Batiscafo se completó en 1948. El nombre de la Fundación Belga para la Investigación Nacional (Fonds National de la Recherche Scientifique).
La construcción real del FNRS-2 se llevó a cabo en los años 1946-1948. El batiscafo fue dañado durante las pruebas en el mar en 1948 cerca de las islas de Cabo Verde.
Para las pruebas en alta mar, el batiscafo FNRS-2 partió en el barco belga Scaldis de 3.500 toneladas. Sin embargo, el Scaldis no era lo suficientemente poderoso como para sacar el FNRS-2 del agua con tanques flotantes llenos de gas. Se realizó con éxito una inmersión de prueba no tripulada a 1.400 m, pero debido a problemas técnicos, no fue posible vaciar los tanques de flotación de la gasolina. Se decidió remolcar el FNRS-2 de regreso al puerto, pero el batiscafo fue golpeado por las olas a los lados del buque y se produjo una fuga de gas de los tanques de flotación. Después de detectar una fuga, la gasolina fue drenada al mar y el FNRS-2 fue levantado a bordo del barco. Se restringieron más pruebas debido a la falta de fondos para la reparación.
Tras el cese de la financiación en 1948, el FNRS-2 fue vendido a la Armada francesa. Especialistas franceses repararon FNRS-2 y renombraron FNRS-3. En febrero de 1954, el FNRS-3 alcanzó una profundidad de 4050 metros en el Atlántico, a 160 millas de Dakar, el récord anterior de Picard fue de 3,150 metros en 1953.
Trieste
Diseñado en Suiza, construido en Italia, un batiscafo de investigación habitado en aguas profundas. Diseñado por Auguste Piccard. Trieste fue lanzado al mar Mediterráneo el 26 de agosto de 1953 cerca de la isla de Capri. El proyecto se basó en la experiencia previa con el batiscafo FNRS-2. Trieste fue gobernado por la flota francesa. Después de varios años de operación en el Mediterráneo, Trieste fue comprado en 1958 por la Marina de los Estados Unidos por $ 250,000. Inicialmente, el área de la tripulación fue diseñada para una inmersión de hasta 4000 m, pero la Marina de los EE. UU. Ordenó a Krupp que fabricara una esfera capaz de resistir la inmersión a 11000 m.
Durante la implementación del proyecto Necton, el 23 de enero de 1960, Jacques Picard y el teniente de la Marina de los EE. UU. Don Walsh se lanzaron a una profundidad de 10,919 m. Por lo tanto, por primera vez lograron conquistar el Abismo Challenger en la Fosa de las Marianas.
Archimède
El desarrollo del batiscafo con el nombre provisional B11000 (Bathyscaphe 11,000 metros) comenzó en 1957 en el arsenal de Toulon. La financiación fue proporcionada por el Centro Nacional Francés de Investigación Científica (CNRS) y la Fundación Nacional de Investigación Belga (FNRS). El proyecto fue dirigido por Pierre Wilm, el capitán de FNRS-3 Georges Wo tomó una parte importante en el diseño. "Arquímedes" tenía la intención de hundirse en el fondo de la Fosa de las Marianas, pero el batiscafo "Trieste" estaba por delante de "Arquímedes"
Shinkai
Shinkai es un vehículo submarino habitado, con una profundidad de inmersión de hasta 600 m. Lanzado en 1970, hasta 1981 tuvo la mayor profundidad de inmersión entre los barcos japoneses. Propiedad y gestión de la Guardia Costera de Japón.
Shinkai 2000 - 1981 año de construcción. Profundidad máxima 2000 m.
Shinkai 6500 - 1990 año de construcción. La profundidad máxima es de 6500m.
Búsqueda 6
El submarino autopropulsado habitado en aguas profundas del batiscafo tipo AS-7 "Search-6" del proyecto 1906 fue diseñado por el Rubin LMBP y el Malachite SPMBM y construido en la Planta Novo-Admiralty en Leningrado en 1975-1979. Las pruebas del dispositivo se llevaron a cabo en el Mar Negro y el Océano Pacífico, mientras se excedió la profundidad de inmersión de 6,000 metros. Las pruebas del aparato revelaron sus importantes fallas de diseño y fueron acompañadas por repetidas fallas en el equipo. Como resultado, en septiembre de 1987, el comité de selección estatal, teniendo en cuenta el envejecimiento físico y moral del aparato AS-7, no lo aceptó como parte de la Armada de la URSS y reconoció que el trabajo posterior era inapropiado.
Mir-1 y Mir-2
Quizás el batiscafo subacuático más famoso.

Mir-1 y Mir-2 son dos vehículos habitados por la investigación soviética y rusa en aguas profundas para operaciones de investigación y rescate oceanológico. Las ideas principales sobre el diseño del aparato, la disposición de sus sistemas individuales, componentes, elementos, sobre la adquisición de equipos científicos y de navegación pertenecen a I. E. Mikhaltsev, su adjunto A. M. Sagalevich y el ingeniero jefe de proyectos de la empresa de construcción naval finlandesa Sauli Ruohonen, quien dirigió el grupo de ingenieros finlandeses. y técnicos que participaron en la construcción del aparato. Los vehículos de aguas profundas fueron fabricados en 1987 por la compañía finlandesa Rauma-Repola Oceanics, y el contrato para la creación de los dispositivos se firmó el 16 de mayo de 1985, y el certificado de aceptación se firmó el 17 de diciembre de 1987, después de las exitosas inmersiones de prueba en el Golfo de Botnia y el Océano Atlántico a la máxima profundidad. 6170 metros (Mir-1) y hasta una profundidad de 6120 metros (Mir-2). De gran importancia para la investigación científica es la profundidad de trabajo de los "Mundos": 6,000 metros, por lo que estos dispositivos pueden alcanzar profundidades en las que se encuentra el 98.5% del fondo de los océanos. El costo de construir cada dispositivo en 1987 ascendió a 100 millones de marcos finlandeses (17 millones de euros).
Jiaolong
Jiaolong es un vehículo habitado chino de aguas profundas sin flotador. Durante el período comprendido entre el 31 de mayo y el 18 de julio de 2010, realizó 17 inmersiones en el Mar del Sur de China, la más profunda de las cuales, a una profundidad de 6759 metros. Este evento convirtió a China en el quinto país después de Estados Unidos, Francia, Rusia y Japón, que cuenta con tecnología moderna para bucear a una profundidad de más de 6500 metros.
Retador de aguas profundas
Deepsea Challenger (DCV 1) es un batiscafo donde, el 26 de marzo de 2012, el director canadiense James Cameron se sumergió en el Challenger Abyss (Mariana Trench). El submarino fue construido en Sydney, Australia, por Acheron Project Pty Ltd., una compañía de investigación y desarrollo. y contiene equipos científicos y cámaras 3D de alta resolución. Deepsea Challenger fue construido en secreto en Australia, en colaboración con National Geographic y con el apoyo de Rolex. El Instituto Scripps de Oceanografía, el Laboratorio de Propulsión a Chorro y la Universidad de Hawai ayudaron en la construcción del batiscafo y la implementación de la misión. El ingeniero de construcción fue el ingeniero australiano Ron Allum. El costo estimado del dispositivo es de 7 millones de dólares.
En el batiscafo, una persona puede sumergirse a cualquier profundidad en el océano e incluso realizar manipulaciones en el agua y elevar algo, pero el costo del batiscafo y su mantenimiento es bastante alto.
Aprovechando el poder del océano.
La imagen muestra brevemente las principales áreas de trabajo en el océano, sin contar las operaciones de búsqueda y rescate:- cultivo y cosecha de mariscos (pescado, mariscos, artrópodos, algas);
- producción y transporte de hidrocarburos (petróleo, gas, hidratos de gas);
- extracción y transporte de mineral a partir de nódulos de ferromanganeso;
- entierro de residuos peligrosos;
- construcción y reparación de estructuras lineales (cables submarinos de fibra óptica, cables eléctricos submarinos, tuberías);
- Búsqueda de objetos bajo el agua y mapeo.
Construcción y reparación de estructuras lineales.
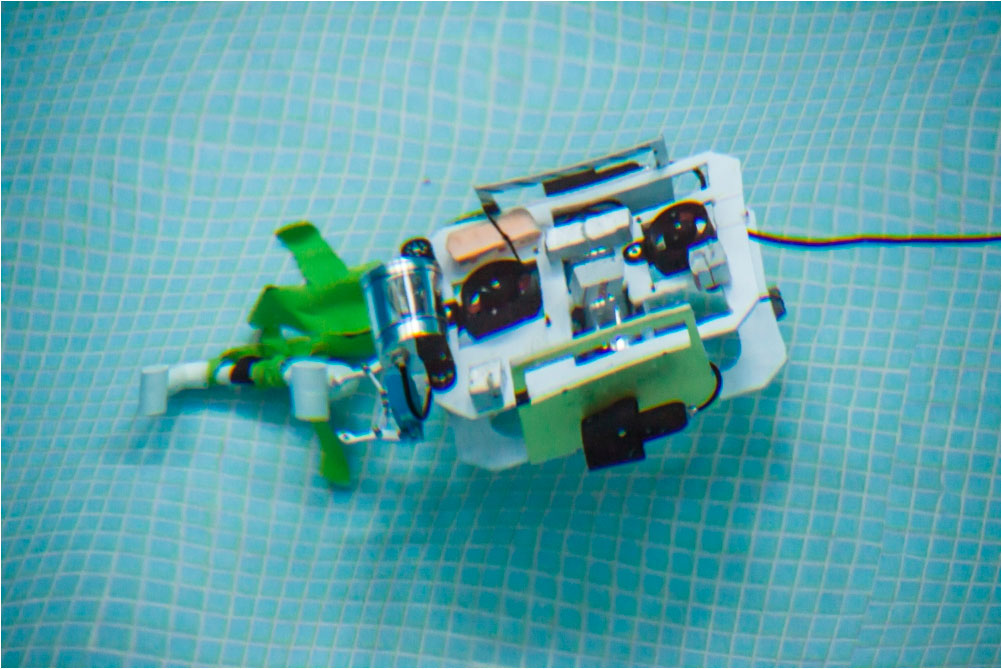
La compañía eléctrica española Red Eléctrica de España ha implementado un sistema de transmisión de energía de corriente continua de alto voltaje (HVDC) que conecta la isla de Mallorca con un sistema de energía unificado en la España continental.Un sistema de 244 kilómetros de líneas eléctricas de corriente continua de alto voltaje conecta el área de Morvedre (cerca de Valencia) con el pueblo de Santa Ponsa, ubicado junto a la capital de Mallorca, Palma de Mallorca. La energía eléctrica de 400 MW se transmite a través de un cable a lo largo del fondo marino, las pérdidas por transmisión de corriente continua son mínimas: 250 kW.Como se puede ver en la figura, cuando se trabajaba en profundidades, se usaban mecanismos especiales. Para el tendido de cables, se utiliza un aparato capjet especial [6], el tendido es controlado por vehículos submarinos (ROV) deshabitados a control remoto.Casi al mismo tiempo, hay un tendido de cables de comunicación:La operación para levantar el caza F14 Tomcat desde una profundidad de 1.140 m cerca de la costa mexicana. Durante la operación, se utilizaron vehículos submarinos a control remoto.Despejando el fondo de las sorpresas de la guerra durante la construcción de la corriente norte:Producción de petróleo en alta mar:Aproximadamente también, con la ayuda de dispositivos telecontrolados, se está desarrollando el campo Shtokman.Entonces el dispositivo se ve vivo:Entonces lo controlan:Y esto es lo que ve el operador al mismo tiempo:Los dispositivos telecontrolados (ROV) se producen en diferentes clases con diferentes profundidades de inmersión. Hay aquellos que se pueden bajar a 4000 m, hay aquellos que no pueden ser más de 300 m, su costo también difiere en órdenes de magnitud. Si los dispositivos que son adecuados para trabajar a grandes profundidades cuestan desde $ 1 millón, entonces los dispositivos que operan a profundidades de hasta 300 m cuestan varias decenas de miles de dólares en diseño industrial.Además de los vehículos a control remoto, se utilizan vehículos submarinos autónomos deshabitados (AUV). Se utilizan principalmente para operaciones de búsqueda, hasta julio de 2018, a partir de 2014 en el Océano Índico, se buscó el avión perdido de las aerolíneas de Malasia con la ayuda de dichos dispositivos.Los vehículos autónomos submarinos se utilizan para controlar el estado de las estructuras lineales submarinas (tuberías, líneas de cable), para mapear la superficie inferior y realizar investigaciones en un área grande. La mayoría de los dispositivos autónomos están hechos en forma de torpedo para reducir la resistencia frontal del agua y así aumentar la duración del trabajo bajo el agua con una sola carga de batería.
Extracción de nódulos de ferromanganeso.
Los nódulos de ferromanganeso son constricciones minerales autigénicas de hidróxidos de hierro y manganeso, así como otros elementos en el fondo de lagos, mares y océanos. El más ampliamente distribuido en las regiones pelágicas de los océanos. Primero estudiado por la expedición inglesa en el barco Challenger en 1872-76. Se obtuvo información detallada sobre los nódulos de ferromanganeso (distribución espacial, formación de facies, petrografía, mineralogía y geoquímica) como resultado de estudios del fondo de los océanos por investigadores de varios países (Gran Bretaña, CCCP, EE. UU., Alemania, Japón, etc.) durante el Año Geofísico Internacional. (1957-1958) y en años posteriores.
Las reservas estimadas de los tres océanos son de 200 mil millones de toneladas, el Océano Atlántico contiene 45 mil millones de toneladas, el Pacífico - 112 mil millones de toneladas, el Océano Índico - 41 mil millones de toneladas. Se encuentran depósitos que se producen a una profundidad relativamente baja y son variedades típicas de depósitos de manganeso. a una profundidad de hasta 400 metros de la costa de Bahía, California y Japón. Los nódulos frente a la costa de Japón se encuentran a una profundidad de 100 a 360 metros en la capa superior del fondo marino a lo largo del archipiélago de Auzu, cerca de Tokio.
Nautilus Minerals Ltd. construye una embarcación especial para procesar el mineral extraído del fondo del océano [7].
Los nódulos de ferromanganeso del Océano Mundial en promedio contienen los siguientes componentes minerales (%): Na 1.9409; Mg 1,8234; Al 2,82; Si 8,624; P 0.2244; K 0,6427; Ca 2,47; Ti 0,647; V 0,0558; Cr 0,0035; Mn 16.02; Fe 15,55; Ni 0,480; Co 0.284; Cu 0.259; Zn 0,078; Sr 0,0825; Zr 0,0648; Mo 0,0412; Tl 0.0129; Pb 0,0900. Es característica la presencia de Ag, Ir, B, Cd, Yb, W, Bi, Y, Hg y otros elementos cuyas concentraciones son significativamente más altas que los valores promedio de la corteza terrestre. Según el contenido promedio de los principales componentes del mineral (Ni, Cu, Co, Mn), los nódulos de ferromanganeso dentro de las regiones estudiadas individuales son comparables con los minerales de los depósitos desarrollados en los continentes.
En la superficie, el mineral se ve así:
Muy pronto prometen establecer la producción industrial.
Interés
En general, los vehículos o robots submarinos desde 2015 se consideran la nueva vanguardia de los robots (The Next Big Drone Frontier) [8].
Se proyecta que el mercado de UUV alcanzará los $ 5.20 mil millones para 2022, con una tasa compuesta anual de 14.07% de 2017 a 2022. El crecimiento del mercado puede explicarse por el aumento en la cantidad de producción de petróleo y gas en alta mar y un aumento en las amenazas a la seguridad marítima.
En general, el interés en la robótica submarina es bastante alto en los Estados Unidos, China, la UE y Singapur.
La investigación de patentes confirma esto.
Geografía de países que registraron patentes en el campo de la robótica subacuática:
Distribución por número de solicitudes presentadas:
Se puede ver que China ahora ha llegado al primer lugar y en unos años veremos desarrollos en hierro y más en el crecimiento de los indicadores económicos.
Segmentación de tecnologías utilizadas en esta área:
Lista de fabricantes de robótica submarina .
Naturalmente, se está trabajando con estudiantes y escolares. De hecho, en los próximos años todos estos desarrollos se destinarán a la industria y se requerirán especialistas para trabajar con los vehículos submarinos que se están creando.
Un indicador de la disponibilidad de dicho trabajo es la presencia de competencias en robótica subacuática:
- MATE International ROV Competition (anualmente desde 2002)
- AUVSI RoboSub Competition (anualmente desde 1997)
- Singapure AUV Challenge (anualmente desde 2013)
- Student Autonomous Underwater Challenge-Europe (SAUC-E) (anualmente desde 2006)
Concurso internacional de ROV MATE
La competencia más masiva. En los Estados Unidos, alrededor de 600 instituciones educativas declaran participar en rondas clasificatorias. Se dividen en competencias escolares y de estudiantes en varias clases:
- Explorer - estudiante
- Ranger - estudiantes de secundaria;
- Navigator - escuela secundaria;
- Scout - estudiantes de primaria.
Los equipos de Vladivostok están realizando con éxito:
Equipo ruso en competiciones internacionales de robótica submarina (2009)El equipo DVFU ROV 2010El equipo ruso se convirtió en el dos veces campeón mundial de robótica submarina (2012)Año 2013Centro de desarrollo de robótica para escolares (2015)Centro de desarrollo de robótica para alumnos y estudiantes (2018)ROBOSUB
La competencia más prestigiosa para estudiantes. Patrocinado por la Fundación UAV y la Oficina de Investigación Naval. Participan equipos de estudiantes de todo el mundo. En 2018, los chinos ganaron en la Universidad de Ingeniería de Harbin, segundo lugar en la Universidad Nacional de Singapur. Realizar con éxito los estudiantes de FEFU y la Universidad Estatal de Moscú. Nevelsky
Reconocimiento RoboSub 2012 en batalla y llegando a la finalSingapure AUV Challenge
Competencia en vehículos autónomos submarinos. Participan estudiantes de países de Asia-Pacífico. Realizar con éxito estudiantes de FEFU.
Student Autonomous Underwater Challenge-Europe
Lamentablemente, no conozco a los participantes de Rusia.
Que tenemosHasta 600 equipos, como en los EE. UU., Todavía están lejos, pero también hay interés:
- MATE ROV Competition Vladivostok (ronda de clasificación para el gran MATE, desde 2015);
- VRO Waterborne IRS (en Innopolis desde 2016);
- Perfil de agua de NTI Olympiad (desde 2017);
- Las primeras competiciones de toda Rusia en robótica submarina Vladivostok 2018 (agosto-septiembre 2018);
- La primera competencia de robótica submarina para estudiantes en los grados 1-4 (2018-2019).
MATE ROV Competencia Vladivostok
Celebrada en Vladivostok sobre la base de la cuenca de la Universidad Estatal de Moscú. Nevelsky
Inscripción de diciembre a marzo .
Descripción
aquí .
Noticias
aquí y
aquí .
Video
aquí .





VRO Water IRS
Se celebraron como parte de la final de la
Olimpiada de robótica de toda Rusia en Innopolis a fines de junio. Para 2019, aún no se sabe si Innopolis celebrará la final de la BPO.
El registro se abre en primavera .
Perfil de agua de NTI Olympiad
El registro ya ha comenzado.Las primeras competiciones de toda Rusia en robótica submarina Vladivostok 2018 (Aquareobototech 2018)
Ya se fue. Puedes leer sobre ellos
aquí y
aquí .
Ver
aquíLa primera competencia en robótica subacuática para estudiantes en grados 1-4
La competencia gobierna
aquí .
La inscripción finaliza el 30 de septiembre .
Oferta
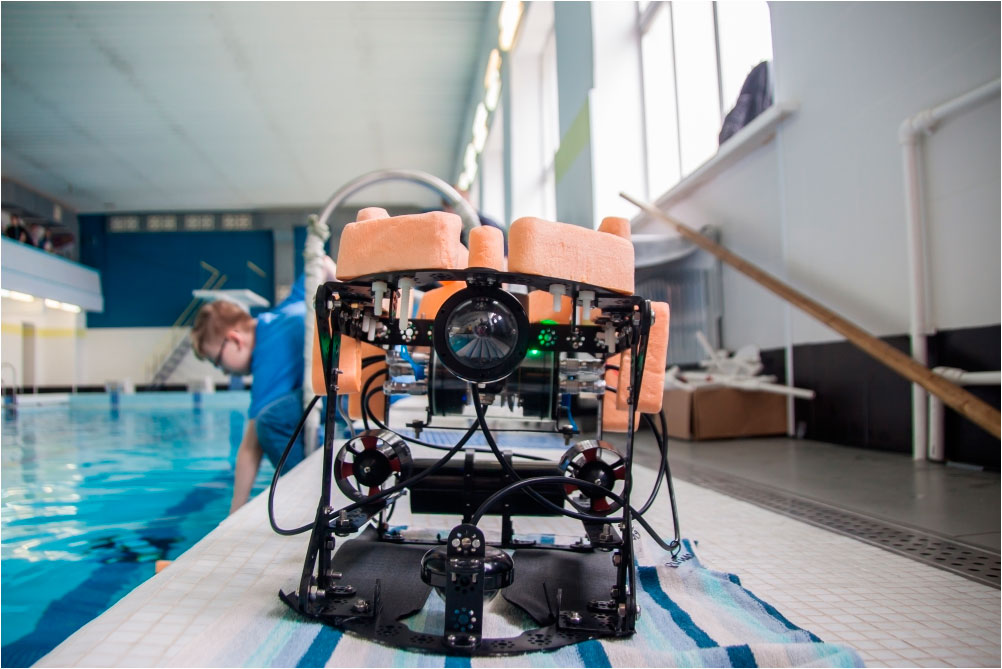
Podemos ofrecer los siguientes conjuntos para robótica subacuática:
- Micro Underwater Robot ( MUR ): un conjunto recomendado para NTI y VRO.
- Kit de montaje del robot de telecontrol MUR MiddleROV
- Kit de montaje de robot de telecontrol MUR ElementaryROV
- MUR HighROV - para participar en MATE (bajo pedido)
Más información en el
sitio web del Centro de Robótica