La perforación de placas de circuito impreso es un verdadero dolor de cabeza para un ingeniero electrónico, pero nuestro nuevo dispositivo ayudará a suavizarlo un poco. Esta adición simple y compacta a los mini taladros extenderá la vida útil del motor y los taladros. Esquema, tablero, instrucciones de configuración, video, ¡todo en el artículo!
¿Para qué sirve el control de velocidad?
Por lo general, los minidrills se construyen sobre la base de motores de CC convencionales. Y la velocidad de tales motores depende de la carga y el voltaje aplicado. Como resultado, al ralentí, el motor gira con mucha fuerza y, en los tiempos de perforación, la velocidad del motor flota en un amplio rango.
Si reduce el voltaje en el motor cuando no hay carga, puede lograr un aumento en el recurso tanto de los taladros como de los propios motores. Además, incluso se mejora la precisión de perforación. La forma más fácil de lograr esto es medir la corriente consumida por el motor.
Hay muchos circuitos de tales reguladores en Internet, pero la mayoría de ellos usan reguladores de voltaje lineal. Son masivos y requieren enfriamiento. En colaboración con
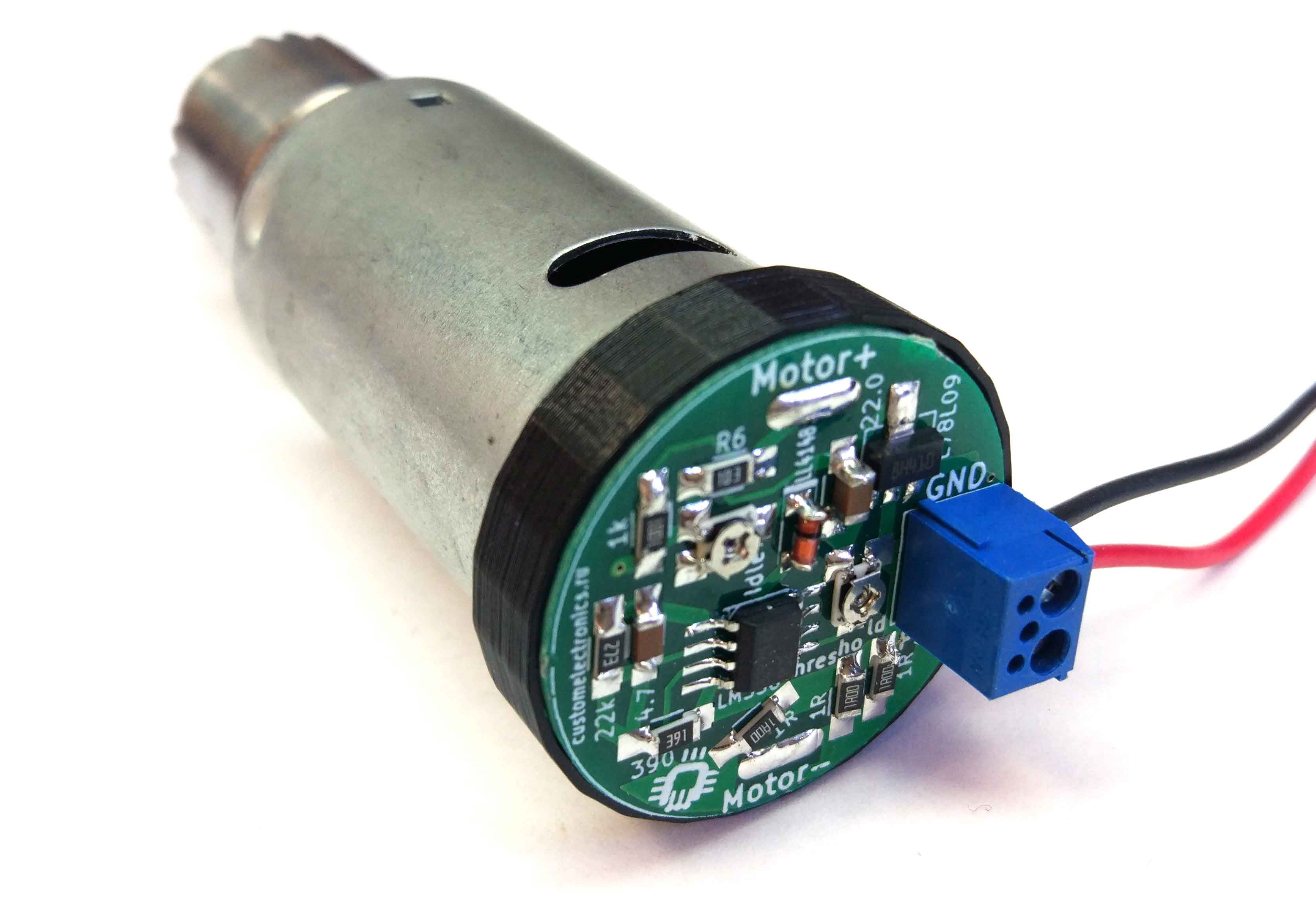
TinyElectronicFriends, queríamos hacer una placa compacta basada en un estabilizador de pulso para que pudiera "desgastarse" en el motor.
Esquema
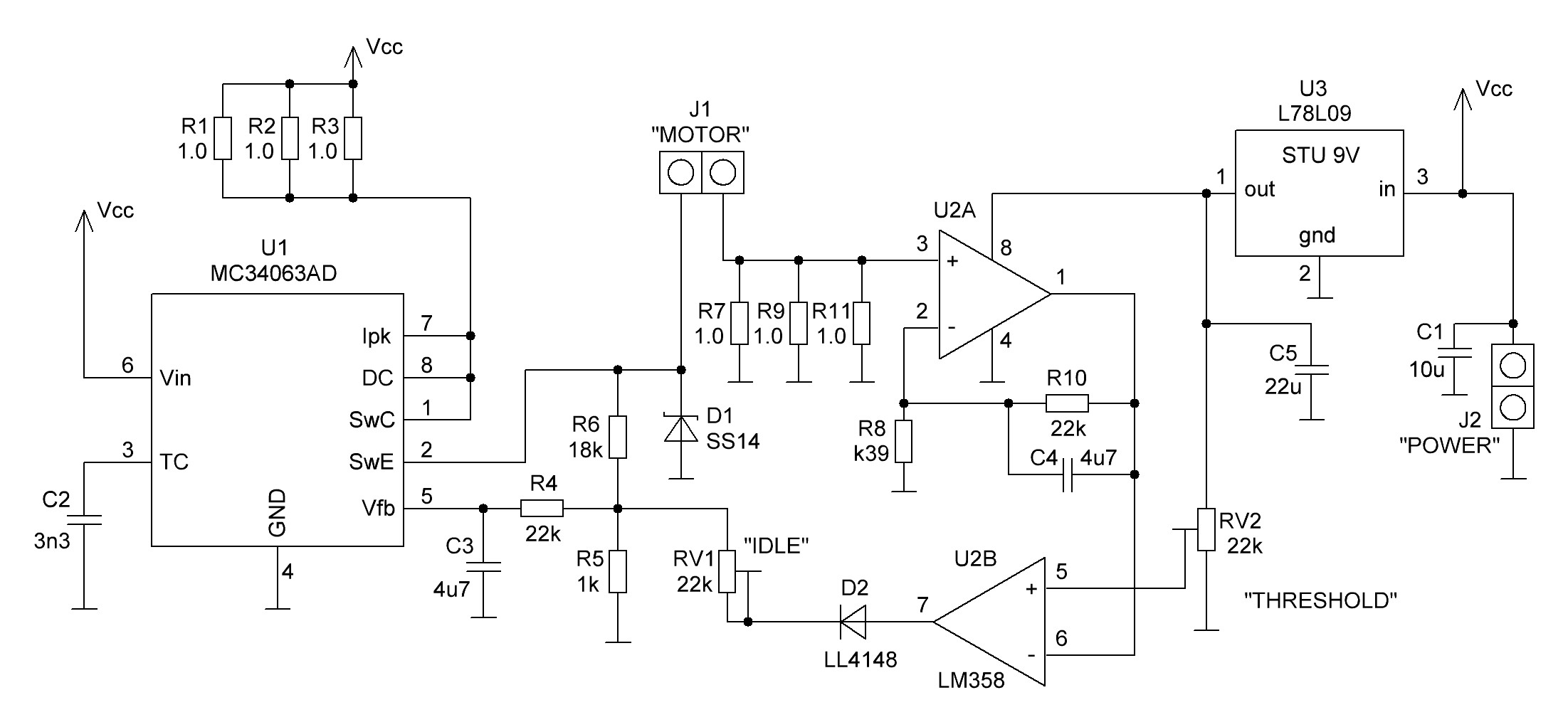
Un controlador PWM con una llave integrada MC34063 regula el voltaje en el motor. El voltaje en la derivación R7, R9, R11 es amplificado por el amplificador operacional y alimentado a través del comparador a la entrada de retroalimentación del controlador PWM.
Si la corriente es menor que cierto valor, entonces se aplica un voltaje al motor, dependiendo del ajuste de resistencia RV1. Es decir, al ralentí, solo se suministrará una parte de la potencia al motor, y la resistencia de corte RV1 le permitirá ajustar la velocidad al mismo tiempo.
Si la señal en la salida del amplificador operacional excede el voltaje en el comparador, entonces el voltaje completo se aplicará al motor. Es decir, al perforar, el motor se encenderá a la máxima potencia. El umbral de conmutación lo establece la resistencia RV2.
Se usa un estabilizador lineal para alimentar el amplificador operacional.
Todos los componentes del circuito disiparán muy poco calor y puede recogerlo completamente en los componentes SMD. Puede funcionar con una amplia gama de voltajes de alimentación (dependiendo de la resistencia R6), no requiere controladores ni sensores de velocidad.
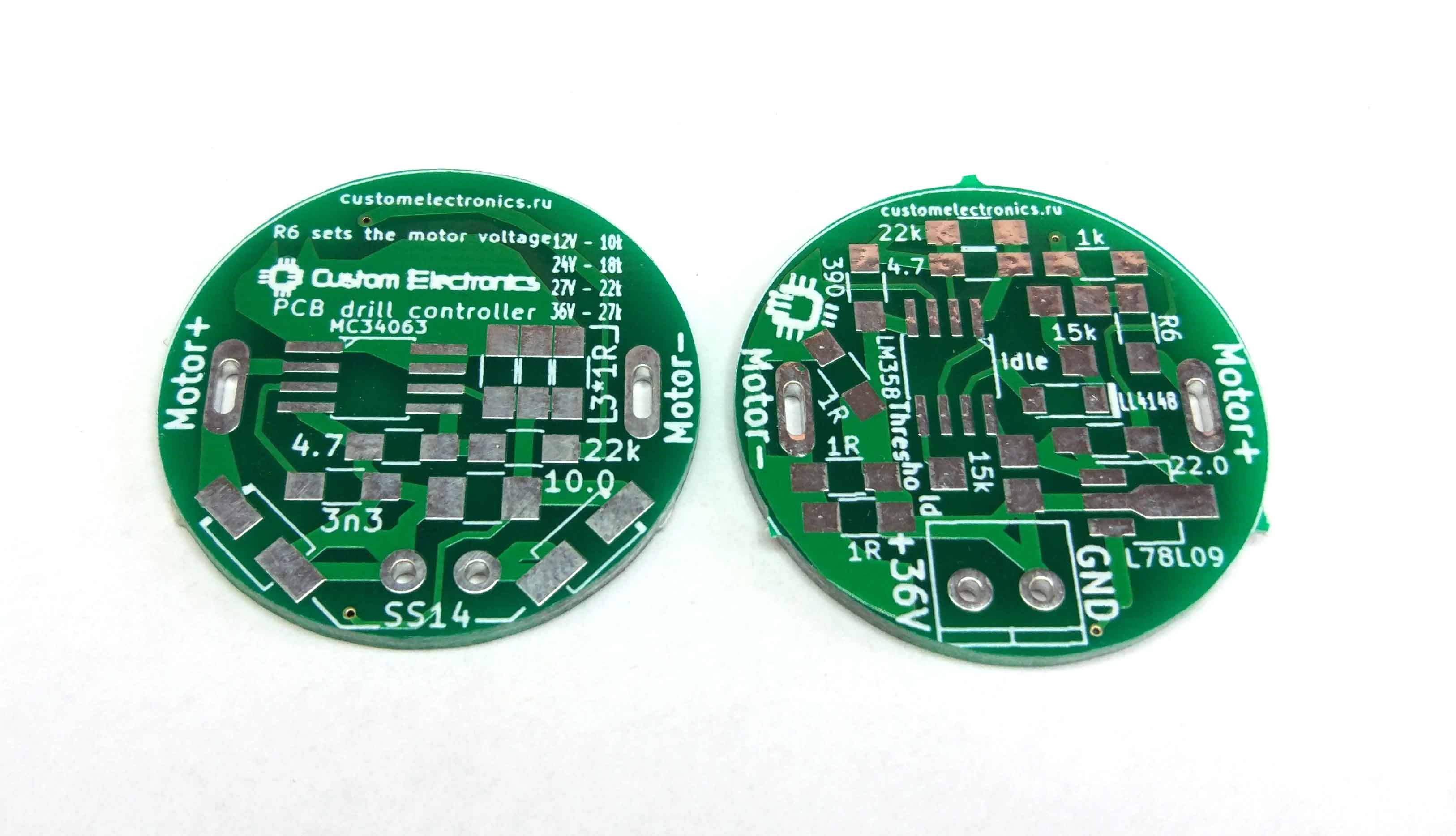
Placa de circuito
Todo el circuito cabe en una placa de circuito impreso de doble cara con un diámetro de 30 mm. En él solo hay algunas piezas de vías y se puede hacer fácilmente "en casa". A continuación, en el artículo, habrá archivos para descargar el archivo PCB para SprintLaout.
Lista de componentes
Aquí hay una lista completa de todo lo que necesita para construir:
- Placa de circuito impreso (enlace a los archivos para la fabricación al final del artículo)
- U1 - MC34063AD Estabilizador de conmutación, SOIC-8
- U2 - LM358, amplificador operacional, SOIC-8
- U3 - L78L09, estabilizador, SOT-89
- D1, D3 - SS14, diodo Schottky, SMA - 2 piezas
- D2 - LL4148, diodo rectificador, MiniMELF
- C1 - condensador, 10uF, 50V, 1210
- C2 - condensador, 3.3nF, 1206
- C3, C4 - condensador, 4.7uF, 1206 - 2 piezas
- C5 - condensador, 22uF, 1206
- R1-R3, R7, R9, R11 - Resistencia de 1 Ohm, 1206 - 6 piezas.
- R4, R10 - resistencia de 22kΩ, 1206 - 2 piezas
- R5 - resistencia de 1kΩ, 1206
- R6 - resistencia 10-27kOhm, 1206. La resistencia depende de la tensión nominal del motor usado. 12V - 10k Ohm, 24V - 18k Ohm, 27V - 22k Ohm, 36V - 27k Ohm
- R8 - Resistencia 390 Ohm, 1206
- RV1, RV2 - resistencia interlineal, 15kOhm, tipo 3224W-1-153 - 2 piezas
- XS1 - terminal, 2 pines, paso 3.81 mm
También hicimos un anillo limitador en una impresora 3D, para una instalación conveniente en el motor. Enlace de descarga para el archivo STL para descargar al final del artículo.

Ensamblaje y configuración
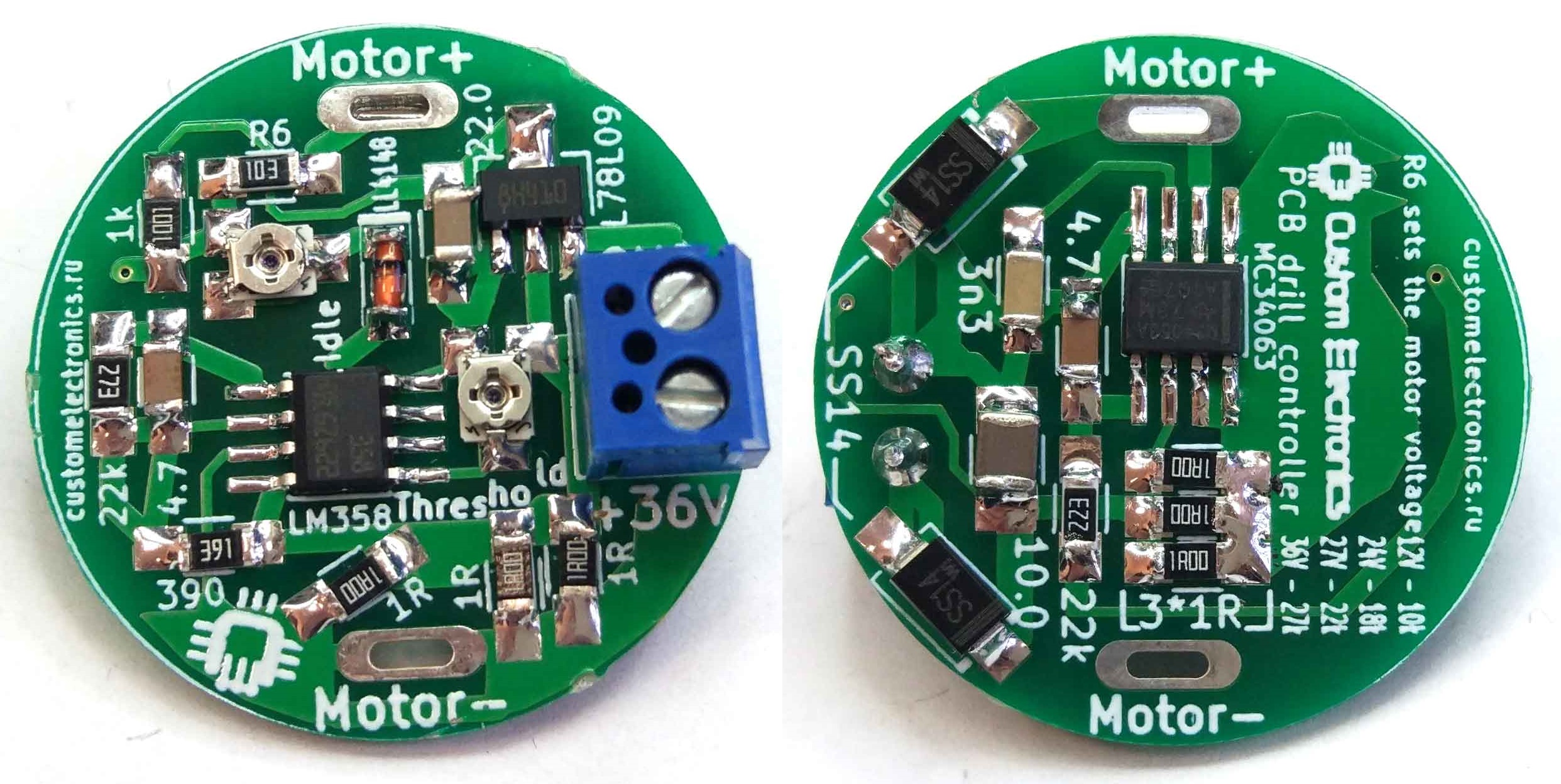
Todo va a ser bastante simple. Las almohadillas de contacto se dibujan para la soldadura manual.
Vale la pena comenzar el ensamblaje de la placa en sí instalando todos los componentes en el lado de la placa sin sintonizar las resistencias y luego en la parte posterior. El terminal es más fácil de instalar al final. La clasificación R6 se selecciona de acuerdo con el voltaje nominal de su motor. En este dispositivo, es importante controlar la posición de la llave en los chips y la polaridad de los diodos. Todos los demás componentes no son polares.
Instale un espaciador entre la placa y el motor para que la placa no toque el motor. El tablero en sí se usa directamente en las ranuras del motor. Verifique la polaridad de la conexión del motor varias veces para que gire hacia el lado derecho, y luego suelde los contactos.
Los contactos para suministrar voltaje a la entrada de la placa están firmados con "GND" y "+ 36V". El menos de la fuente de voltaje de entrada está conectado al pin "GND", y el más a "+ 36V". El voltaje de la fuente de alimentación debe coincidir con el voltaje nominal del motor.
Configurar el regulador es muy simple:
- Ajuste la resistencia RV2 al umbral del regulador para obtener el máximo
- Ajuste la resistencia RV1 a la velocidad de ralentí óptima del motor.
- Ajuste la resistencia RV2 a un umbral tal que cuando aparezca la menor carga, el voltaje en el motor aumente
Video
Es difícil evaluar el efecto del uso en el video, ¡pero ahora siempre perforamos solo con el regulador! Solo toma un poco acostumbrarse y asegurarse de que los taladros estén bien afilados. Y, por supuesto, en cualquier momento puedes encenderlo al máximo para siempre.
Referencias
Puede encontrar enlaces para descargar todos los archivos necesarios en la
página principal del proyecto .
Gracias por su interes!