Hola a todos! No hace mucho tiempo, comencé a estudiar programación para microcontroladores. Al principio, escribir programas simples para parpadear un LED o incluso dos ya no era divertido y se estaba volviendo aburrido. Y una noche, pensando en qué ocupar su cabeza, decidió buscar proyectos más complejos. En Internet, vi muchas cosas que la gente crea, pero sobre todo me sorprendió un robot de seis patas o un hexápodo.
Inspirado por las fotos y el video, decidí probar suerte. El desarrollo del caso, la electrónica y los programas se realizarán desde 0.
Etapas de desarrollo:Parte 1 - DiseñoParte 2 - montajeParte 3 - CinemáticaParte 4 - trayectorias y secuencias matemáticasParte 5 - ElectrónicaParte 6: transición a la impresión 3DParte 7 - nuevo alojamiento, software de aplicación y protocolos de comunicaciónDesarrollo de un modelo 3D del cuerpo.
Materias primas y componentes para el futuro robot:
0. Arduno Due (escribiremos en Atmel Studio en puro C sin Arduino IDE, al mismo tiempo le diré cómo conectar un depurador a esta placa) - 1 PC;
1. HLK-RM04 (convertidor UART a WIFI) - un puente transparente con UART a WIFI - 2 piezas;
2. Servos MG996R (de China, cómo puede sin él) - 18 piezas;
3. LM317D2T-TR para alimentar servos + musgo fino en forma de resistencias y condensadores;
4. CAD "COMPASS 3D";
5. Contrachapado de 3 mm como material para el estuche (barato y huele delicioso);
6. Capacidad para ordenar el corte por láser;
7. Tiempo. Mucho tiempo
Al comienzo del viaje, surgió la pregunta: "¿Qué tipo de edificio quiero?". En el proceso de encontrar una respuesta a esta pregunta, me encontré con varias soluciones listas para usar. Lo que más le gustó a PhantomX y A-Pod. Después de mirar los casos, decidí comenzar el desarrollo, pero no. Apareció el siguiente problema: como no veía estos robots en mis ojos y no los sostenía en mis manos, tenía una mala idea de sus dimensiones. En busca de una solución a este problema, me encontré con uno de los artículos sobre Habr. El autor del artículo
tomnewmann amablemente compartió conmigo los dibujos de su proyecto, por lo que muchas gracias a él.
Después de apreciar las dimensiones de los detalles futuros y pensar un poco en toda la información recibida, comencé a esbozar los dibujos del caso. Pensé que sería más prudente comenzar con el diseño de las piernas, ya que son la parte más difícil del cuerpo.
Coxa
Después de varias horas de reflexión, apareció el primer modelo de Coxa (se acostumbra denotar el nodo que conecta la pierna al cuerpo). El nodo trató de hacerlo lo más compacto posible. El servoaccionamiento estará completamente dentro, por lo que no debe olvidarse (lo que hice la primera vez) sobre el orificio para la salida de cables.
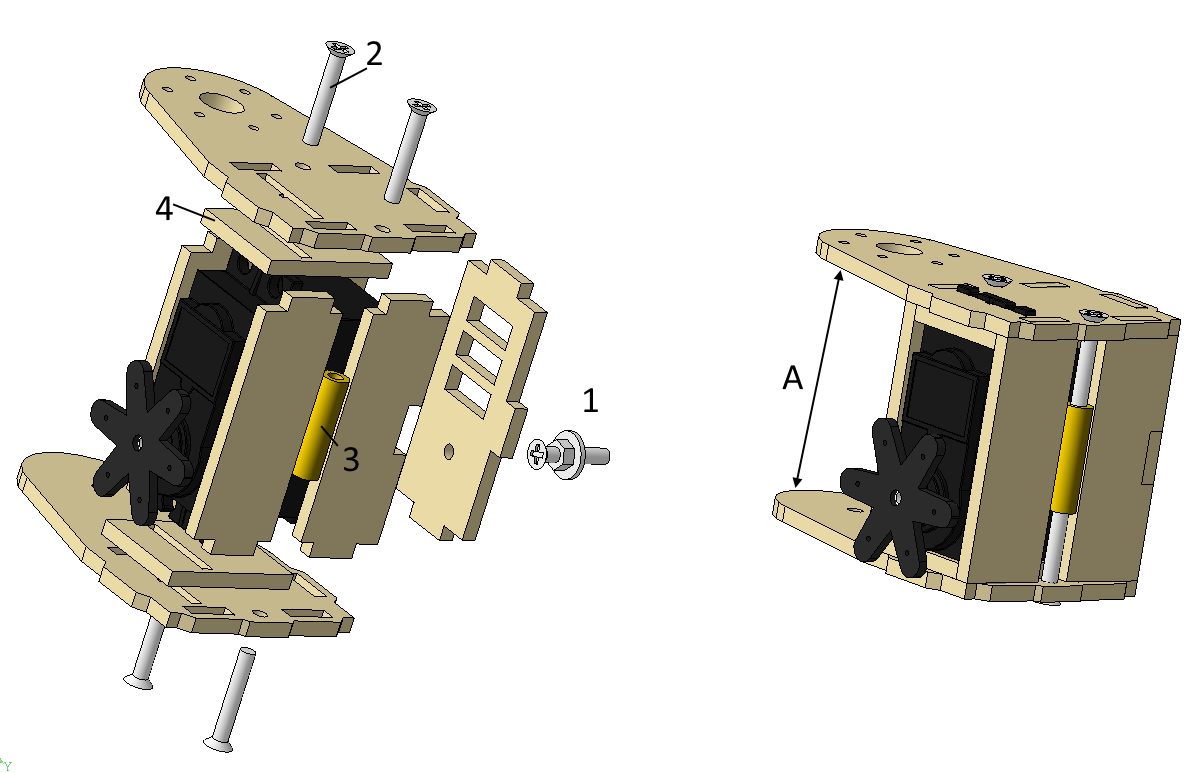 Detalle 1 - El eje en el que se unirá el fémur (la segunda parte de la pierna). Montado de tornillo M3x15, arandela M3 y tuerca
Detalle 1 - El eje en el que se unirá el fémur (la segunda parte de la pierna). Montado de tornillo M3x15, arandela M3 y tuerca
Parte 2 - Tornillo M3x20
Parte 3 - Rack para PCB M3x20
Detalle 4: son una especie de servo bloqueos para evitar que se mueva verticalmente.
La altura (A) de este nodo debe hacerse para que el servoaccionamiento que se colocará en el marco pueda caber dentro.Fémur
Luego, debes hacer "Femur". El detalle resultó ser el más simple de todos y creo que no necesita comentarios.
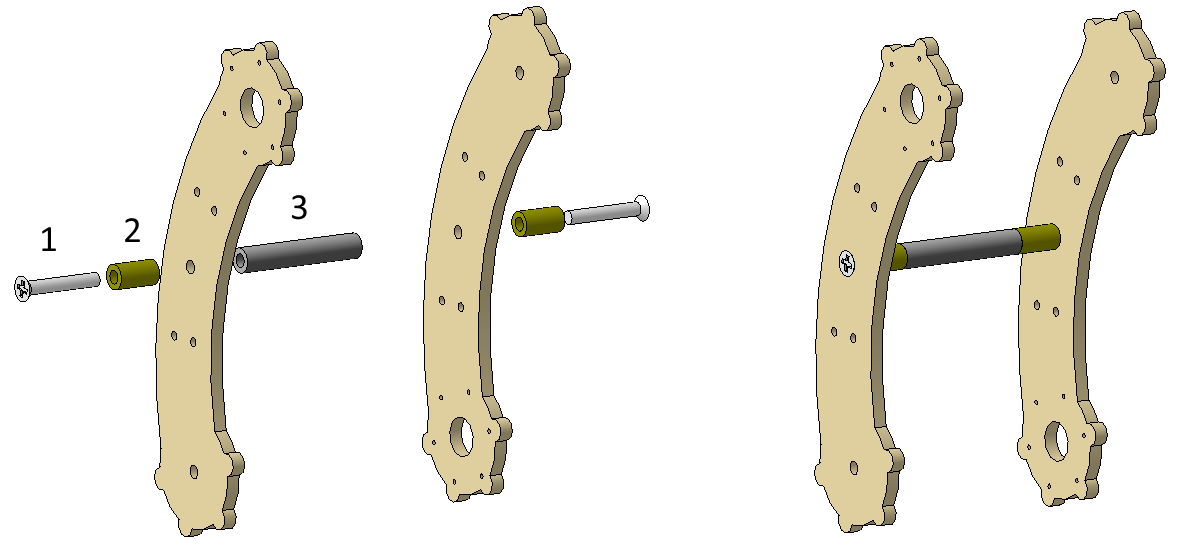 Parte 1 - Tornillo M3x20
Parte 1 - Tornillo M3x20
Detalle 2 - Funda de plástico de 3x10 (no encontré un soporte largo, tuve que buscar otras soluciones)
Parte 3 - Rack para PCB M3x30Tibia
El siguiente detalle es Tibia, la última parte de la pierna. No debería haber problemas con él y su longitud depende de la altura a la que se planea entender el robot. Lo tengo a 130 mm del eje del servo, ya no lo hice, ya que al aumentar la longitud también aumenta la carga en los servos, especialmente en el servo en Coxa. En el segundo lado, hice un segundo agujero para el eje para que el servo se pueda voltear y la longitud de la palanca se reduzca si de repente los servos son duros.
Marco
El siguiente en la línea es el marco, la parte más grande. Es ella quien determina la configuración de las piernas del futuro robot. Hay varias opciones para la ubicación de las piernas, pero me decidí por la opción con la letra Zh (cuando se ve desde arriba parece).
En las primeras etapas del diseño, surgió la pregunta: "¿Y a qué distancia deben estar las piernas entre sí?" En busca de una respuesta a esta pregunta, me di cuenta de que no hay recomendaciones sobre este tema. Al estudiar los proyectos y las opciones de marcha de otras personas, concluyó que la distancia se selecciona en función del ángulo de rotación máximo deseado de la extremidad. Cuanto mayor es la distancia entre las piernas, mayor es el ángulo que las extremidades pueden alcanzar al caminar.
Los dibujos de
tomnewmann me ayudaron
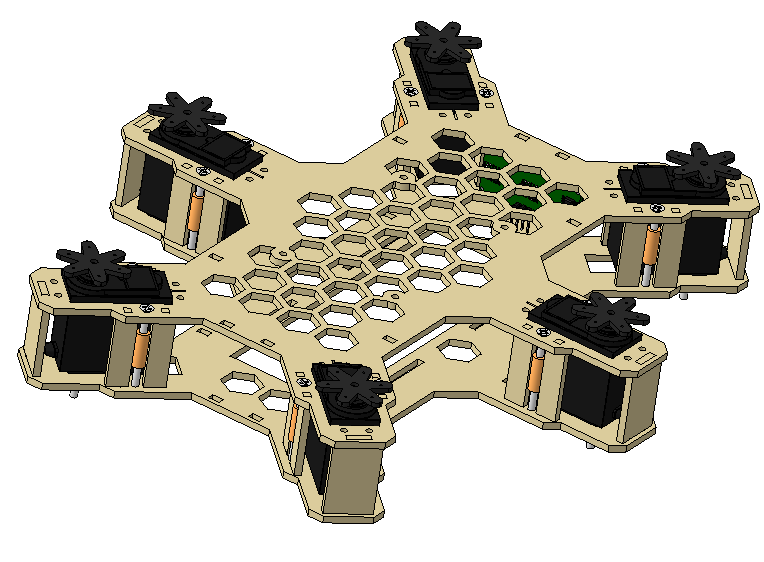
a resolver este problema, del cual tomé la distancia entre las piernas, ya que las dimensiones de los robots eran bastante similares (la mía es un poco más pequeña). Unas horas más tarde, nacieron las partes superior e inferior del marco:
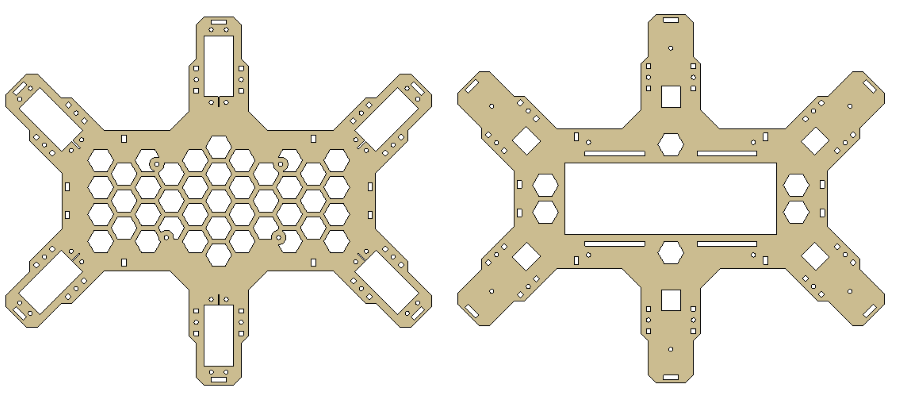
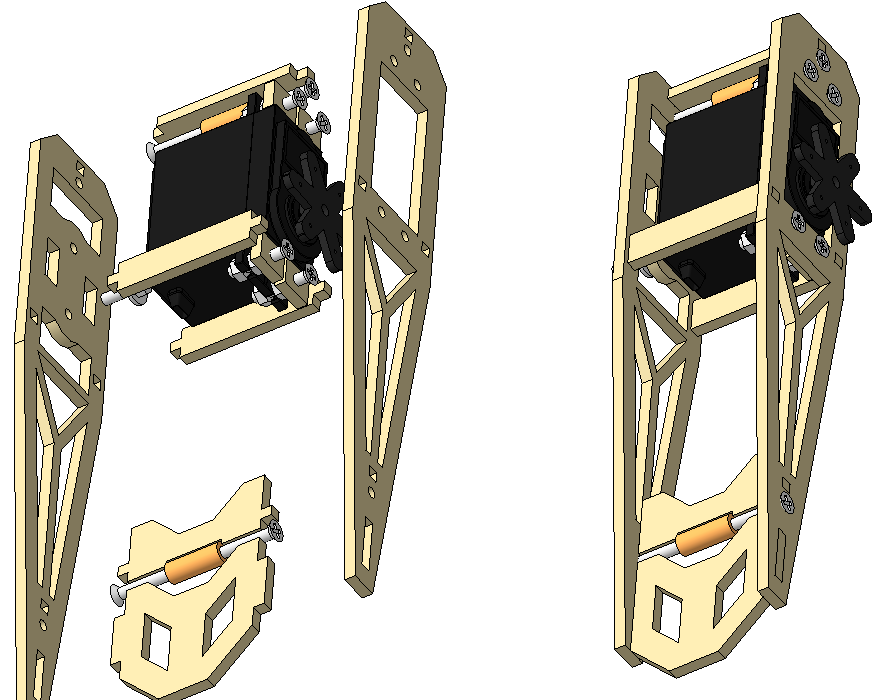
En la parte inferior del marco, se hace un recorte para la batería y sus sujetadores. Por cierto, se sujetará con velcro, que se usa en los cuádricos cuando se les une la batería. El marco es bastante grande. Después de sentarme otra noche y hacer partes intermedias en forma de soportes entre las partes, decidí que era hora de ensamblar el marco con los servos instalados. El resultado no se hizo esperar:
Como ya tenemos todos los componentes necesarios, puede hacer un ensamblaje completo de la carcasa:
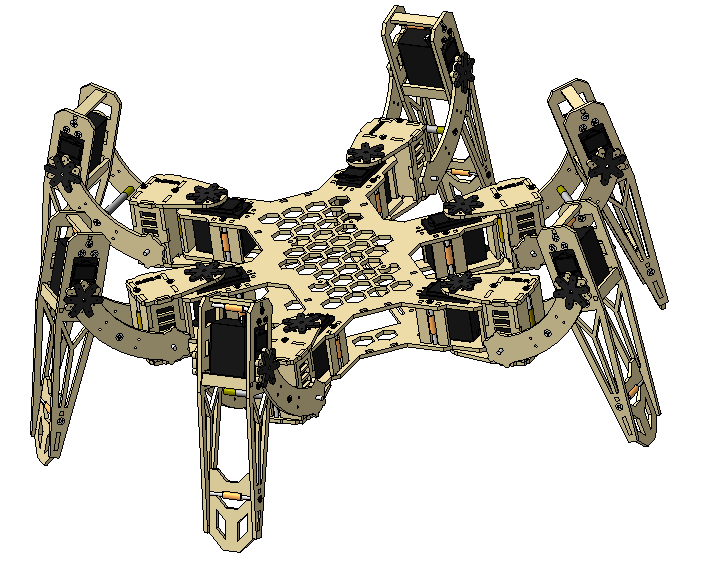
En el centro de la caja, entre las placas, se planeó tener una fuente de alimentación para servos, una batería 3S Li-po en la parte inferior y una placa de control (Arduino Due) en la parte superior. En consecuencia, cambié el ensamblaje del marco:
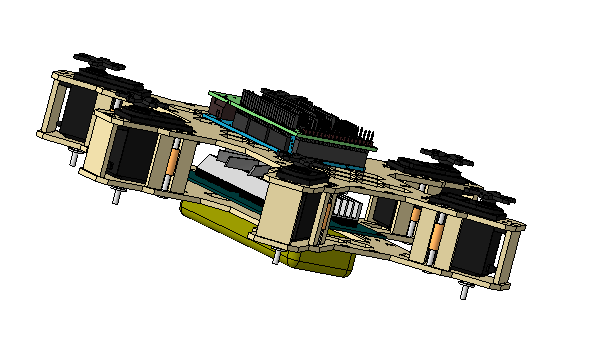 El tablero en la parte superior es un modelo Arduino Mega con algún tipo de escudo. Se usa solo para el aspecto y tiene las mismas dimensiones que Due.
El tablero en la parte superior es un modelo Arduino Mega con algún tipo de escudo. Se usa solo para el aspecto y tiene las mismas dimensiones que Due.No se ve muy bien, pero teniendo en cuenta los cables que sobresalen será aún peor. Además, el cuerpo me parecía muy delgado. Decidí cubrir la electrónica lo más posible sin afectar la apariencia y se me ocurrió un nombre para mi creación.
La solución al primer problema fueron las tapas en la parte superior e inferior, cubriendo la batería y la electrónica de control. Estas son las únicas partes que se ensamblarán con pegamento. Una tarde después, nació un modelo de tapa inferior.
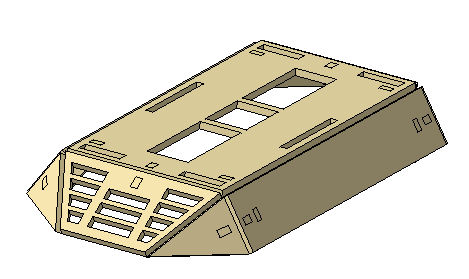
Si no hubo problemas con la primera tarea, entonces con la segunda tarea hubo dificultades durante 2 días. Sí, me tomó mucho tiempo encontrar un nombre para él. Recordando accidentalmente la película "Terminator" decidió llamarla "Skynet" y cortar el nombre en la portada. También se agregaron recortes para HC-SR04.
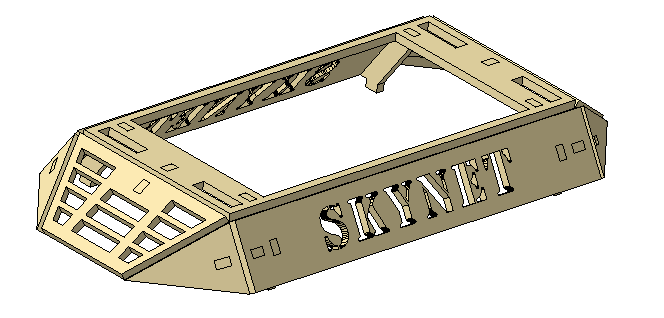
Como resultado de agregar solo dos techos, el cuerpo cambió significativamente la apariencia para mejor:

El resultado me impresionó mucho y el aspecto es bastante atractivo. En la
segunda parte contaré sobre el montaje del caso y un rastrillo en el que pisé.