
Varias tecnologías que usamos ahora fueron "inventadas" e implementadas por selección natural y otros mecanismos evolutivos hace millones de años. Esto, por ejemplo, navegación ultrasónica (murciélagos), sonares (ballenas), pistola eléctrica (anguilas eléctricas), etc. Al final resultó que, hace millones de años, la naturaleza también desarrolló algoritmos según los cuales funciona el protocolo de red TCP / IP, ya creado por humanos. Los métodos de búsqueda de alimentos para hormigas son consistentes con estos algoritmos.
En casi todas las colonias de hormigas, la mayoría de las especies de hormigas tienen recolectores, individuos que entregan alimentos. A primera vista, los recolectores corren al azar alrededor del nido, algunos más lejos, otros más cerca, y sus actividades no tienen un sentido particular. Pero esto es solo a primera vista. A pesar de la aparente aleatoriedad de su comportamiento, obedece ciertas leyes.
El caso más llamativo es el comportamiento de los recolectores de hormigas de la especie Pogonomyrmex barbatus. Casi nunca regresan a la colonia sin presas: comida. La frecuencia y el número de redadas de alimentos depende de la frecuencia y el número de recolectores que regresan a la colonia.
Muchos patrones de comportamiento de las hormigas no han cambiado durante muchos millones de años, por lo que se puede decir que fueron estos insectos los que inventaron los principios básicos de TCP / IP hace millones de años. Según el investigador
Balaji Prabhakar , hace mucho tiempo las hormigas aprendieron sobre funciones como el inicio lento de la transmisión y la interrupción de la transmisión como resultado de la interrupción de la comunicación (tiempo de espera). En cuanto al primer caso, cuando se envía un gran número de recolectores (paquetes), la transmisión continúa, pero a grandes intervalos.
Si no hay hormigas que regresan con comida (no hay confirmación de la entrega del paquete), la transmisión se interrumpe por un tiempo determinado. En el caso de este tipo de hormigas, el retraso es de unos 20 minutos. Si no ha regresado una sola hormiga durante este período, los nuevos recolectores no van a ninguna parte, el nido está en modo de espera. Tan pronto como
aparece al menos un recolector de alimentos , se reanuda el envío de proveedores de entrega de alimentos.
Optimización de ruta: retroalimentación positiva y negativa
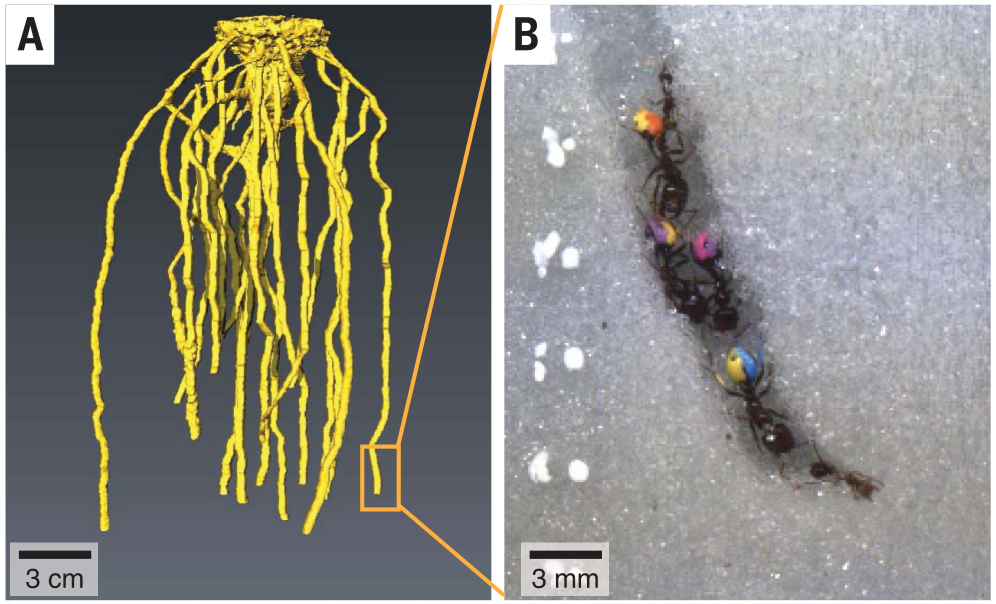
Al salir del nido, el recolector se mueve a lo largo de una trayectoria arbitraria. Deja un rastro oloroso (para otras hormigas) con la ayuda de feromonas. La hormiga regresa a lo largo de su propio camino, y la trayectoria puede ser ligeramente diferente (por ejemplo, volviendo con la carga, se ve obligado a sortear obstáculos que acaba de conquistar a la ligera, como un pico de montaña).
Si el recolector regresa con la carga, las otras hormigas "entienden" que todavía hay comida donde el explorador acaba de visitar. Inicialmente, otras hormigas se mueven a lo largo de los "caminos" originales, pero finalmente establecen una nueva ruta más corta. El hecho es que más hormigas logran pasar a lo largo del camino corto por unidad de tiempo que a lo largo del largo, lo que significa que la traza de feromonas del camino corto aumentará después de un tiempo, pero la trayectoria del camino largo, por el contrario, se debilitará. Al final, la ruta más corta permanecerá, y las rutas largas desaparecerán debido a la evaporación de las feromonas. Hay un matiz interesante: si las feromonas no se evaporaron, o si se evaporaron más lentamente que en la realidad, entonces las hormigas no podrían hacer un camino corto.
 Hormiga segadora (Pogonomyrmex barbatus)
Hormiga segadora (Pogonomyrmex barbatus)Y así, dado que el sistema se basa en la retroalimentación positiva (cuando otras personas hacen que la ruta de feromonas sea más "notable" y la retroalimentación negativa (las feromonas se evaporan, la ruta se vuelve menos notable para otras personas), la trayectoria de las hormigas se autoorganiza y, en última instancia, comienza a moverte por el camino más corto.
Hormigas y robots
Este año se supo sobre otro estudio de colonias de hormigas, cuyos resultados se utilizaron en robótica. El hecho es que los científicos se han quedado sorprendidos por la capacidad de los insectos para evitar atascos al excavar movimientos. Todos ellos de alguna manera se organizan, las hormigas pasan al resto de los individuos con una carga.
En un nuevo experimento, los
expertos examinaron el comportamiento de 30 hormigas de fuego de la especie Solenopsis invicta. En el proceso de creación del nido, se llevaron la carga (partículas del suelo). Al principio, aparecieron atascos en los túneles, pero con el tiempo las hormigas aprendieron a esperar hasta que el paso estuviera despejado, y luego llevaron su carga sin problemas.
Los científicos han estudiado el algoritmo de comportamiento de las hormigas y han utilizado este algoritmo para entrenar pequeños robots. Los mecanismos fueron entrenados para transportar la carga en un modelo de hormiga, y los robots comenzaron a funcionar sin problemas y sin problemas. Los robots aprendieron a dejar pasar a sus hermanos con carga y seguir la ruta prevista sin colisiones y retrasos especiales. Según los autores del estudio, los algoritmos obtenidos pueden ser útiles para la logística, los robomóviles, así como para construir modelos para reducir los atascos. Anteriormente, solo se usaban modelos estadísticos, pero ahora es bastante posible usar los mecanismos que usan las hormigas.
IoT y división de hormigas de una colonia
Otro experimento, que se realizó hace varios años,
ayudó a comprender por qué las hormigas de una especie deciden separarse de su colonia principal y establecer una nueva (el enjambre de abejas es de aproximadamente la misma naturaleza). Entonces, tan pronto como las hormigas comienzan a chocar con demasiada frecuencia en el nido, el número de colisiones alcanza un valor crítico, una cantidad de trabajadores "eligen" a la heredera de la reina, la recogen y se mudan a un nuevo lugar (no todos los tipos de estos insectos hacen esto).
Los científicos creen que el principio que permite a las hormigas determinar el momento en que es necesario separarse de la colonia principal ayudará a determinar la confiabilidad de las predicciones meteorológicas basadas en datos de sensores y sensores de una región específica. Por ejemplo, los sensores que intercambian información entre sí pueden transmitir un determinado token, y el servidor central, además de la información de observación del clima, recibirá información sobre el número de registros de ciertas condiciones climáticas en un lugar determinado. Cuantos más registros, más confiable será el pronóstico del tiempo basado en las lecturas.
El modelo de comportamiento presentado anteriormente para las hormigas también es relevante para otros insectos sociales, como termitas, abejas, avispas y otros. El estudio adicional del comportamiento de los insectos sociales revelará otras "tecnologías" que utilizan. Algunos de ellos pueden ser útiles para los humanos. Pero, en general, la naturaleza todavía tiene una gran cantidad de secretos que aún no se han revelado.