La startup de Carnegie Mellon University tiene la intención de conducir la intersección usando la radio en automóviles futuros

La vida es corta, y en el tráfico parece aún más corta. O cuando está parado en un semáforo, la luz roja está encendida y nadie está manejando a lo largo del cruce.
En los suburbios de ciudades como Ciudad de México, Sao Paulo, Roma, Moscú, Pekín, El Cairo y Nairobi, el viaje por la mañana al trabajo puede exceder las dos horas. Agregue el camino a casa desde el trabajo aquí, y a menudo sucede que las personas pasan de 3 a 4 horas diarias en el camino.
Imagine que podríamos desarrollar un sistema que reduciría el viaje de ida y vuelta diario, por ejemplo, en un tercio, de tres a dos horas. Esto puede ahorrarle 22 horas al mes o 3 años en una carrera de 35 años.
Anímate, viajeros infelices al trabajo y a casa, ya que dicho sistema ya se está desarrollando y se basa en varias tecnologías recientes. Uno de ellos es la comunicación inalámbrica entre automóviles. A menudo se le conoce como tecnología V2V (vehículo a vehículo), aunque las señales de tráfico y otras infraestructuras también pueden incluirse en esta conexión. Otra tecnología emergente son los robomobiles, que por su naturaleza deberían reducir el tiempo que viajan al trabajo (y hacer que este tiempo sea más productivo). Y también está el
Internet de las cosas (IoT), que promete reunir no solo a 7 mil millones de personas, sino también a 30 mil millones de sensores y dispositivos.
Se puede hacer que todas estas tecnologías trabajen juntas usando un algoritmo que mis colegas y yo desarrollamos en la Universidad Carnegie Mellon en Pittsburgh. El algoritmo permite que los automóviles trabajen juntos usando sus sistemas de mensajería a bordo para que los automóviles se muevan sin problemas y sin el uso de semáforos. Para este proyecto, registramos la empresa Virtual Traffic Lights [semáforos virtuales] (VTL), verificamos cuidadosamente el algoritmo en las simulaciones y, desde mayo de 2017, este proyecto ha estado trabajando cerca del campus universitario. En julio, demostramos por primera vez al público la tecnología VTL en Arabia Saudita, a la que asistieron más de 100 científicos, funcionarios gubernamentales y representantes de empresas privadas.
Los resultados de la prueba confirmaron lo que ya sospechábamos: era hora de rechazar los semáforos. No tenemos nada que perder, sino innumerables horas de estar sentado en un automóvil en el tráfico.
El principio del semáforo no ha cambiado mucho desde que este dispositivo se inventó en 1912 y se introdujo en Salt Lake City, y dos años después en Cleveland [
vale la pena aclarar que estamos hablando del primer semáforo eléctrico. El primer dispositivo con accionamiento manual fue inventado en Londres en el siglo XIX / aprox. perev. ] Funciona con un temporizador, por lo que a veces te paras en rojo en la intersección y no ves otros autos cerca. el temporizador se puede ajustar para que coincida con los patrones de movimiento en diferentes momentos del día, pero eso es prácticamente todo lo que se puede hacer, y no es tanto [
aquí los autores son astutos, ha habido sistemas automáticos de control de tráfico con cámaras que capturan el tráfico, y Sistemas remotos de control de tráfico desde el centro, donde las personas controlan la congestión del tráfico / aprox. perev. ] Como resultado, muchas personas pasan mucho tiempo todos los días.
Imagine que, en cambio, varios automóviles conducen hasta una intersección, intercambiando datos gracias a la tecnología V2V. Votan y eligen conjuntamente un automóvil líder durante un determinado período en el que decide en qué dirección convertirse en principal (el equivalente a la luz verde) y en qué dirección "brilla el rojo".
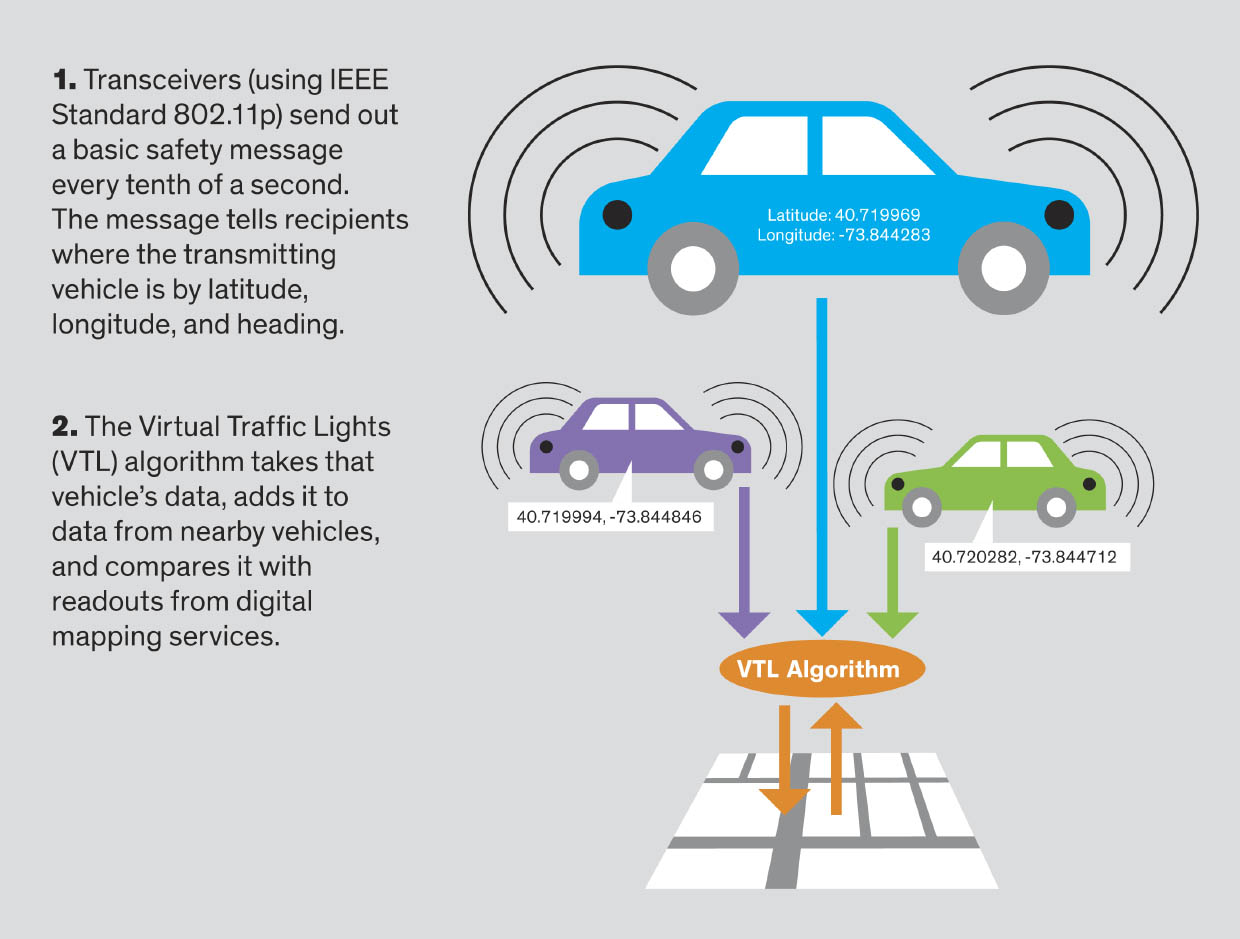 Los transceptores IEEE 802.11p envían mensajes 10 veces por segundo. El mensaje indica las coordenadas de la máquina y la dirección del movimiento.
Los transceptores IEEE 802.11p envían mensajes 10 veces por segundo. El mensaje indica las coordenadas de la máquina y la dirección del movimiento.
El algoritmo recibe datos, los agrega a los datos de otras máquinas y los compara con tarjetas digitales.¿Y quién tiene el camino principal? Todo sucede de manera muy simple y con respeto. El líder asigna un estado de luz roja a su dirección de movimiento y da luz verde a todos los automóviles que viajan perpendicularmente. Después de, digamos, 30 segundos, otra máquina, en un flujo perpendicular, se convierte en líder y hace lo mismo. El liderazgo se transfiere constantemente aquí y allá para compartir honestamente la responsabilidad y la carga; después de todo, la posición de un líder está relacionada con el sacrificio de los intereses personales por el bien común.
Con este enfoque, no se necesitan semáforos. El trabajo de control de tráfico se disuelve a la perfección en la infraestructura inalámbrica. Ya no estará sentado en el automóvil, de pie en el semáforo en rojo si nadie conduce por una calle transversal.
Nuestro algoritmo VTL selecciona líderes al interrogar parámetros tales como la distancia al automóvil delantero desde cada entrada a la intersección, la velocidad de los automóviles, la cantidad de automóviles en cada carretera, etc. En igualdad de condiciones, el algoritmo selecciona el automóvil más alejado de la intersección para que tenga tiempo de frenar. Esta regla garantiza que el vehículo más cercano a la rotonda tenga el derecho de paso, es decir, una luz verde virtual.
Es importante tener en cuenta que la tecnología no necesita cámaras, radares y lidares. Recibe toda la información de los sistemas inalámbricos que funcionan a través de comunicaciones dedicadas de corto alcance (
DSRC ). Estos son circuitos de radio y un canal de comunicación asignado para ellos, desarrollado en los EE. UU., Europa y Japón desde 1999 hasta 2008, y que permite que los automóviles cercanos se comuniquen entre sí. Los desarrolladores de DSRC imaginaron varias opciones para usar el estándar, incluida la recolección de dinero para el uso de carreteras de peaje y el control de crucero adaptativo cooperativo, así como exactamente la función para la que lo usamos para evitar colisiones en las intersecciones.
Desde la fábrica, el sistema DSRC se instala en una pequeña cantidad de máquinas (y, posiblemente, la nueva tecnología 5G
lo reemplazará ). Pero tales transceptores
se pueden comprar , y tienen toda la funcionalidad que necesitamos. Utilizan el
estándar IEEE 802.11p y están obligados a enviar mensajes diez veces por segundo. El mensaje indicará las coordenadas y la dirección del movimiento del vehículo. Nuestro algoritmo, que funciona en la computadora de un automóvil, recibe datos del automóvil, agrega los datos que recibe de los vecinos y superpone el resultado en tarjetas digitales como Google Maps, Apple Maps u OpenStreetMap.
De esta manera, cada automóvil puede calcular la distancia a la intersección y a otros automóviles que se acercan desde otras direcciones. También puede calcular la velocidad, aceleración y trayectoria de cada una de las máquinas. Y eso es todo lo que el algoritmo necesita para decidir quién pasará por la intersección (luz verde) y quién debe detenerse (rojo). Después de eso, el tablero de cada automóvil mostrará el color del semáforo, propio para cada conductor. Por supuesto, el algoritmo VTL resuelve solo el problema del control del tráfico en las intersecciones, la definición de las señales "stop" y "ceder". Él no conduce un auto. Pero trabajando en su campo, VTL puede hacer lo que sea necesario y es mucho más barato que la tecnología de automóviles totalmente autónoma. Los robomobiles necesitan mucha más potencia informática para descubrir los datos que provienen de sus lidares, radares, cámaras y otros sensores, y aún más para que, combinándolos, obtengan una imagen del espacio circundante. VTL no compite con la tecnología de robomobiles, los complementa.
Nuestro método puede ser imaginado como un reemplazo de una regla práctica con verdadera inteligencia. El algoritmo permite que las máquinas controlen el tráfico por sí mismas, como lo hace para las colonias de insectos y bancos de peces. Un banco de peces al mismo tiempo cambia su dirección de movimiento, sin que un controlador de tráfico en jefe dirija a sus miembros individuales. Cada pez recibe información de movimiento de los peces vecinos.
Este es un ejemplo del comportamiento de un sistema distribuido como alternativa a una red centralizada. Con su ayuda, una flota de automóviles en una ciudad puede regular de manera independiente el tráfico sin control centralizado e intervención humana, sin policías, semáforos, señales de alto o de paso.
No inventamos el concepto de intersecciones inteligentes; ha existido durante varias décadas. Una de las primeras ideas fue instalar bobinas magnéticas debajo de la superficie del asfalto, lo que determinaría la aproximación de los automóviles a la intersección y ajustaría la duración de las fases verde y roja. También puede usar cámaras en las intersecciones para calcular los autos que se aproximan y calcular el mejor momento para las fases del semáforo. Pero ambas tecnologías son caras de instalar y mantener, y por lo tanto se instalan en pocas intersecciones.
Comenzamos introduciendo el algoritmo VTL en modelos virtuales de dos ciudades: Pittsburgh en EE. UU. Y Oporto en Portugal. Tomamos datos de tráfico de la Oficina del Censo de EE. UU. Y de la agencia portuguesa pertinente, agregamos mapas de Google Maps y los enviamos a SUMO (
Simulación de movilidad urbana , un simulador de tráfico urbano), un software de código abierto desarrollado por el Centro aeroespacial alemán.
SUMO simuló la hora pico en dos escenarios: uno con semáforos existentes y otro con nuestro algoritmo VTL. Se descubrió que VTL reduce el tiempo de viaje promedio de 35 minutos a 21.3 minutos en Oporto y de 30.7 minutos a 18.3 minutos en Pittsburgh. La disminución en el tiempo de viaje de las personas que ingresan a la ciudad desde los suburbios disminuyó no menos del 30% y hasta el 60%. Es importante destacar que la variación en el tiempo de viaje, la desviación de la cantidad de la media, también disminuyó.
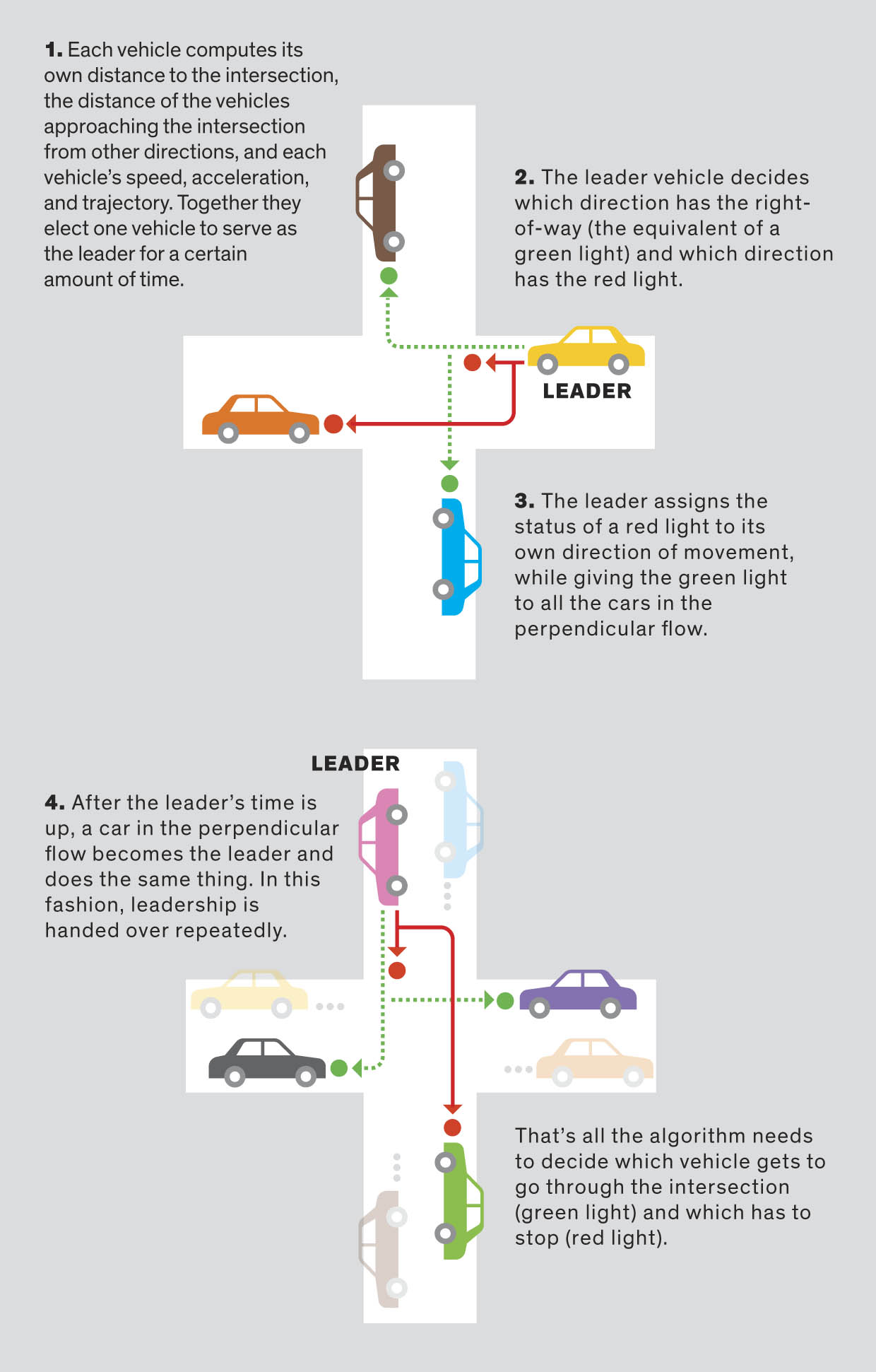 Esquema de selección de líderes
Esquema de selección de líderesSe ahorra tiempo por dos razones. En primer lugar, VTL elimina el tiempo de espera en el semáforo en rojo cuando nadie conduce por un cruce. En segundo lugar, VTL controla el tráfico en todas las intersecciones, y no solo donde hay señales activas. Por lo tanto, los automóviles no tenían que, por ejemplo, detenerse donde hay una señal de alto, si no había otros automóviles cerca.
Nuestras simulaciones han demostrado otros beneficios, quizás incluso más importantes que ahorrar tiempo. El número de accidentes de tránsito disminuyó en un 70% y, en su mayor parte, las reducciones ocurrieron en las intersecciones y en las señales de alto. Además, al minimizar el tiempo que pasa parado frente a un semáforo, acelerando y frenando, VTL reduce significativamente las emisiones de carbono de los automóviles.
¿Qué se requerirá para transferir VTL del laboratorio al mundo real? Primero necesita construir DSRC en automóviles fabricados. En 2014, la Administración Nacional de Seguridad del Tráfico en las Carreteras de los Estados Unidos propuso usar esta tecnología, pero la administración Trump aún no ha desarrollado las reglas apropiadas, y aún no está claro cuál será la decisión final. Por lo tanto, los fabricantes en los Estados Unidos serán reacios a integrar los transceptores DSRC en las máquinas, ya que aumentan su costo y serán útiles solo si están en otras máquinas, un problema estándar de huevo y gallina.
Hasta que un número suficiente de máquinas estén equipadas con dichos dispositivos, la escala de producción seguirá siendo baja y el costo seguirá siendo alto. En los Estados Unidos, solo General Motors comenzó a integrar radios DSRC en los automóviles, y todos ellos son modelos caros de Cadillac. Sin embargo, en Europa y Japón la imagen es más positiva. Muchos fabricantes de automóviles europeos decidieron integrar estos transceptores en los automóviles, y este año comenzó en Japón, donde el gobierno aboga por el uso de la tecnología, y el gigante de fabricación Toyota ha confirmado repetidamente su disposición para este paso.
Pero incluso si no pasa nada con DSRC, nuestro algoritmo se puede construir sobre la base de otras tecnologías inalámbricas, por ejemplo, 5G o Wi-Fi.
El concepto de penetración incompleta del transceptor plantea el problema de uno de los mayores obstáculos para la implementación de VTL. ¿Puede funcionar si solo un pequeño porcentaje de automóviles está equipado con transmisores? Sí, si los funcionarios deciden equipar los semáforos existentes con esta tecnología.
Los funcionarios pueden querer hacer esto, aunque solo sea para no abandonar la infraestructura existente por valor de cientos de miles de millones de dólares. Ofrecemos una solución a corto plazo para este problema: puede actualizar los semáforos existentes para que puedan reconocer la presencia de automóviles equipados con DSRC en la carretera y, en consecuencia, establecer las fases verde y roja. La belleza de este esquema es que todos los automóviles pueden usar las carreteras y la intersección, independientemente de la presencia de una radio. Es posible que este enfoque no reduzca el tiempo tanto como la solución ideal, pero seguirá siendo un 23% mejor que los sistemas actuales de gestión del tráfico, según nuestras simulaciones y ensayos de campo en Pittsburgh.
Otro problema es cómo tratar con peatones y ciclistas. Incluso si todos los automóviles y camiones están equipados por la fuerza con transceptores, no se puede esperar que los ciclistas los instalen y los lleven los peatones. Debido a esto, será difícil para las personas cruzar con seguridad las intersecciones ocupadas.
Nuestra solución a corto plazo, para el período de existencia conjunta de semáforos y VTL, es dar a los peatones la oportunidad de organizar su propia carretera principal. En nuestro programa piloto en Pittsburgh, colocamos un botón que enciende una luz roja, real para peatones y virtual para automóviles, en los cuatro lados de la intersección. Este sistema funcionaba cada vez que se activaba.
A la larga, los problemas de los ciclistas y peatones pueden resolverse con la ayuda de Internet de las cosas. Con la extensión IoT, llegará el momento en que todos llevarán siempre un dispositivo compatible con DSRC.
Mientras tanto, hemos demostrado que, en condiciones ideales, sin señales físicas, los automóviles que votan por el derecho de paso pueden asignar parte del ciclo a los peatones. Durante el turno, se enciende una luz roja virtual en todos los automóviles en todas las entradas a la intersección, y dura lo suficiente como para que los peatones crucen la carretera de manera segura. Esta solución preliminar no será óptima para un flujo denso, por lo que estamos trabajando en un método que utiliza cámaras económicas montadas en el tablero de instrumentos de los automóviles, lo que debería ayudar a detectar a los peatones y darles paso.
La prometedora tecnología de los semáforos virtuales hace que se acerque la era de los robomóviles. Hoy imaginamos que tales autos harán todo lo que hacen los conductores humanos: detenerse en los semáforos, ceder el paso en las señales de "ceder el paso", y así sucesivamente. Pero, ¿por qué llevar a cabo la automatización a la mitad? Sería mucho mejor si tales máquinas controlaran el movimiento de forma completamente independiente sin los signos y señales habituales. La clave para lograr esto es V2V y la infraestructura de estas comunicaciones.
Esto es importante, ya que los robomobiles de hoy a menudo no pueden navegar y conducir a través de intersecciones concurridas. Este es uno de los problemas técnicos más difíciles, y continúa molestando incluso al líder de la industria Waymo.
En nuestras simulaciones y ensayos de campo, descubrimos que los robomobiles equipados con VTL pueden controlar las intersecciones de intersección sin semáforos ni señales. La ausencia de la necesidad de reconocer estos objetos simplifica enormemente los algoritmos de visión por computadora y las computadoras que los ejecutan, de lo que dependen los robomobiles experimentales de hoy. Estos elementos en total, junto con los sensores (especialmente los lidares) representan la parte más cara de los robomobiles.
Dado que la arquitectura de software de VTL es modular, será fácil integrarlo en el software robomobile. Además, VTL es capaz de resolver la mayoría, si no todos, los problemas más complejos asociados con la visión por computadora, por ejemplo, si el sol brilla en la cámara, o la lluvia, la nieve, la tormenta de arena o las curvas de la carretera bloquean la vista. VTL, por supuesto, no compite con la tecnología robótica; Los complementa. Y esto solo puede ayudar a acelerar el lanzamiento de robomobiles en el camino.
Pero esperamos que mucho antes de este punto, nuestro sistema funcione en máquinas que las personas controlen. Ya en julio de este año, pudimos realizar una demostración pública de la tecnología en la ciudad de Riad en Arabia Saudita, con un calor de 43 ° C, con dispositivos instalados en máquinas de prueba. Representantes del gobierno, la academia y las corporaciones, incluido Uber, se subieron a un autobús Mercedes-Benz y recorrieron el campus de ciencia y tecnología de King Abdulaziz, cruzando tres intersecciones, dos de las cuales no tenían semáforos. El autobús, así como el camión GMC, el SUV Hyundai y el automóvil Citroën cruzaron estas intersecciones de todas las formas posibles, y el sistema VTL funcionó siempre con éxito. Cuando un conductor no obedeció específicamente el semáforo en rojo e intentó cruzar la intersección, nuestro sistema de seguridad funcionó mostrando un rojo intermitente a todos los demás autos que se acercaban, lo que evitó el incidente.
Espero que este momento haya sido un punto de inflexión en nuestro sistema de gestión del transporte. Los semáforos se han abierto camino. Y de hecho, han existido por más de cien años. Es hora de seguir adelante.