
Hola
Soy topógrafo, mis colegas de CROC me pidieron que hablara sobre cómo remodelar drones, cómo programar un vuelo y cómo procesamos todo más tarde, convirtiendo las imágenes tomadas de un dron en ortofotomapas detallados, modelos de terreno tridimensionales de alta precisión y planos topográficos en una escala de 1: 500–1. : 10,000.
Mi equipo y yo probamos varios drones diferentes y finalmente nos decidimos por el "caballo de batalla" DJI Phantom 4 PRO con varias modificaciones. Lo primero y más importante que hicimos con él fue equiparlo con un receptor GNSS geodésico, lo que nos permite determinar los centros de fotografía con precisión centimétrica.
Su GPS estándar proporciona una precisión del orden de 15-20 metros. Para resolver problemas geodésicos con tal precisión, necesita cruces especiales en el suelo o algún otro tipo de distorsión, como colocar platos de papel en coordenadas conocidas.

Lo hacemos más simple y más complicado: colocamos una estación base terrestre con coordenadas exactamente conocidas, e integramos un receptor GNSS adicional en el dron e instalamos una antena externa. Por ejemplo, comenzamos con MATRICE 600 con el sistema DJI instalado a bordo del D-RTK, que era muy engorroso, costoso y no conveniente para resolver tareas geodésicas.
Luego rehicimos el DJI PHANTOM 4 PRO más compacto: pudimos integrar equipos GNSS adicionales en un paquete estándar. La masa total del dron aumentó en aproximadamente 100 gramos. El tiempo de vuelo fue levemente dañado, pero no crítico: un conjunto de cuatro baterías es suficiente para completar una encuesta de 200 a 300 ha.
El fantasma dio una oportunidad importante: el conjunto principal comenzó a caber en el equipaje de mano de un avión de pasajeros. Es decir, ahora podemos llevar todo el equipo con nosotros a cualquier parte, muy, muy simple.
El conjunto mínimo es un dron modificado (todo su conjunto), un receptor geodésico GNSS como estación base terrestre, una computadora portátil con un programa de planificación de vuelo, un mapa descargado (para trabajar sin Internet) y un plan de vuelo escrito para el punto, si hubiera tal oportunidad de antemano. Todavía necesita baterías adicionales, un cargador (o varios) y un generador. Tomamos un generador de gasolina, que está hecho en forma de estuche, es muy conveniente para nuestras necesidades. O un inversor que funciona con el motor de un automóvil. Para algunas regiones, necesita más calefacción (en particular, para baterías y manos).
Desde una batería, puede disparar 50 hectáreas con una resolución de 2-5 centímetros por píxel.
Trabajamos así: llegamos al lugar con la tarea del dron detallada de antemano (en la oficina). Usamos UgCS (este es un software profesional de planificación de vuelo de drones bastante caro que vende y aconseja la integración y mejoras de CROC en Rusia. Por supuesto, dicho software es aplicable no solo en geodesia, sino que puede ser utilizado por rescatistas, agrónomos, constructores, etc.) pero en estas áreas no soy fuerte, por lo que todas las preguntas son para colegas de CROC). En él indicamos los límites del área de trabajo, la superposición transversal, la altura de la fotografía, y luego el software calculará la ruta de vuelo del dron, teniendo en cuenta las características del terreno. Es decir, UgCS corta todo como debería: con aterrizajes intermedios para reemplazar las baterías y el resto.
Miramos para ver si hay obstáculos no contados, luego configuramos la estación base GNSS. Las coordenadas de los puntos del terreno están especificadas por el receptor Topcon GR-5.

Además, ya hay una misión de vuelo. Aquí están los límites de la zona de sobrevuelo y la superposición longitudinal o transversal para pegar. Ponemos un par de puntos de contraste de control para el control:

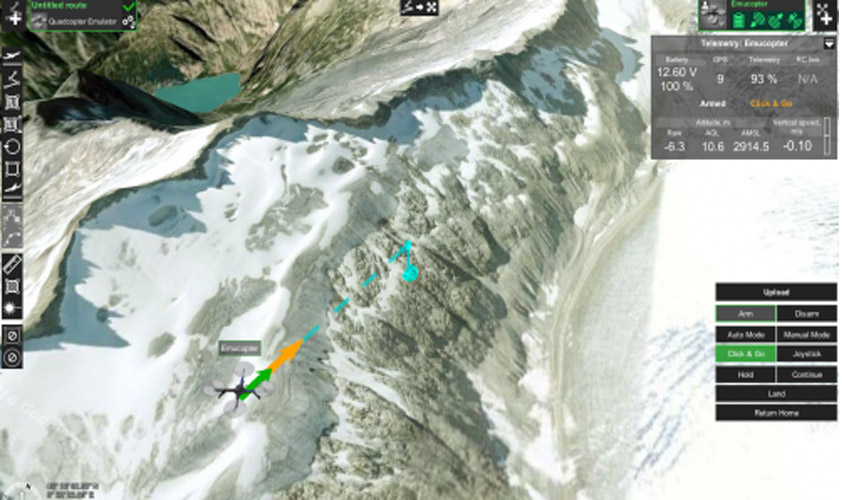
Para conectar un piloto automático desde GNSS, conectamos el dron al control remoto, el control remoto a una tableta con un programa de control DJI y luego la tableta a una computadora portátil. Configurar este paquete sobre la marcha no es fácil. Aquí mis colegas de CROC me ayudaron significativamente: instalar, ajustar, probar antes del lanzamiento.
El siguiente punto es que aproximadamente cada tercer objeto está ubicado donde no hay acceso estable a Internet. El software hace frente a esto. Pero también hay áreas difíciles, por ejemplo, montañas, donde los problemas con la propagación de señales ya están comenzando. Es por eso que usamos Phantoms: tienen muchos sensores incorporados para evitar obstáculos. Cuando pierde el contacto, regresa. Cuando no puede regresar, comienza a sentarse. Y estos sensores te ayudan a volar en condiciones difíciles, como las tierras altas o en la ciudad. Tuvimos varios casos en los que los sensores de obstáculos ayudaron a evitar una emergencia. Por ejemplo, en las montañas del emirato de Fujairah (EAU), perdimos contacto con el avión no tripulado, y debido al viento, el avión no pudo regresar al punto de despegue. Luego, el piloto automático tomó la decisión de aterrizar y, basándose en sensores de obstáculos, aterrizó el dron en la grieta entre las dos laderas de la cordillera en un área relativamente plana.
El resultado del vuelo del dron son fotografías en estos puntos (este software para el procesamiento ya resalta sus centros):
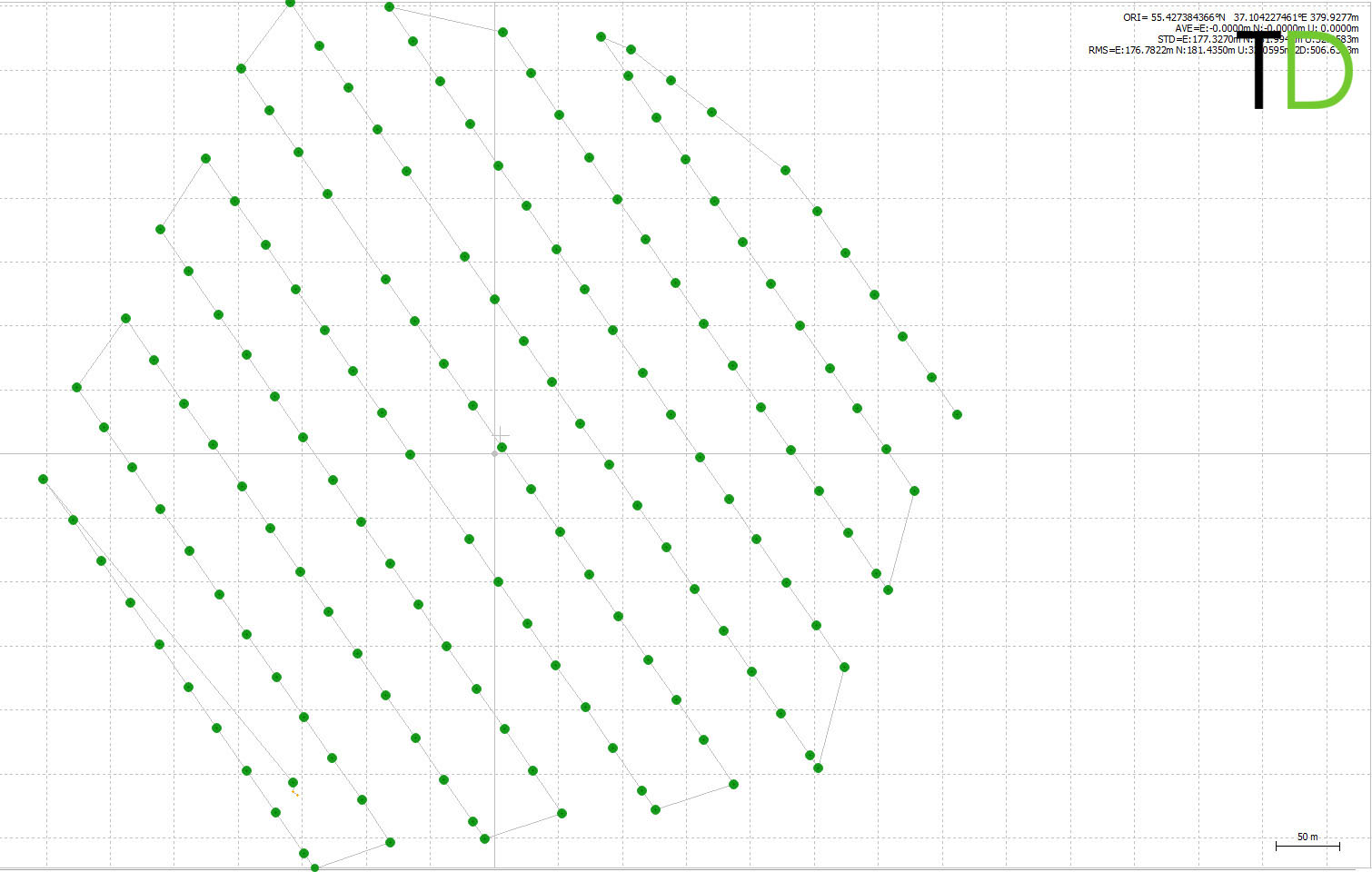
Las mediciones GNSS se descargan por separado a través de Wi-Fi después de que se completa el vuelo, se almacenan en el dron y no se transmiten al suelo en tiempo real.
Puede irse más lejos, porque el siguiente paso es el procesamiento fotogramétrico de fotografías aéreas. Las coordenadas de los puntos de control en tierra se usan solo para el control:

Aquí hay una nube de puntos después de la clasificación. El color resalta vegetación, soportes, cables de líneas eléctricas, edificios y estructuras:
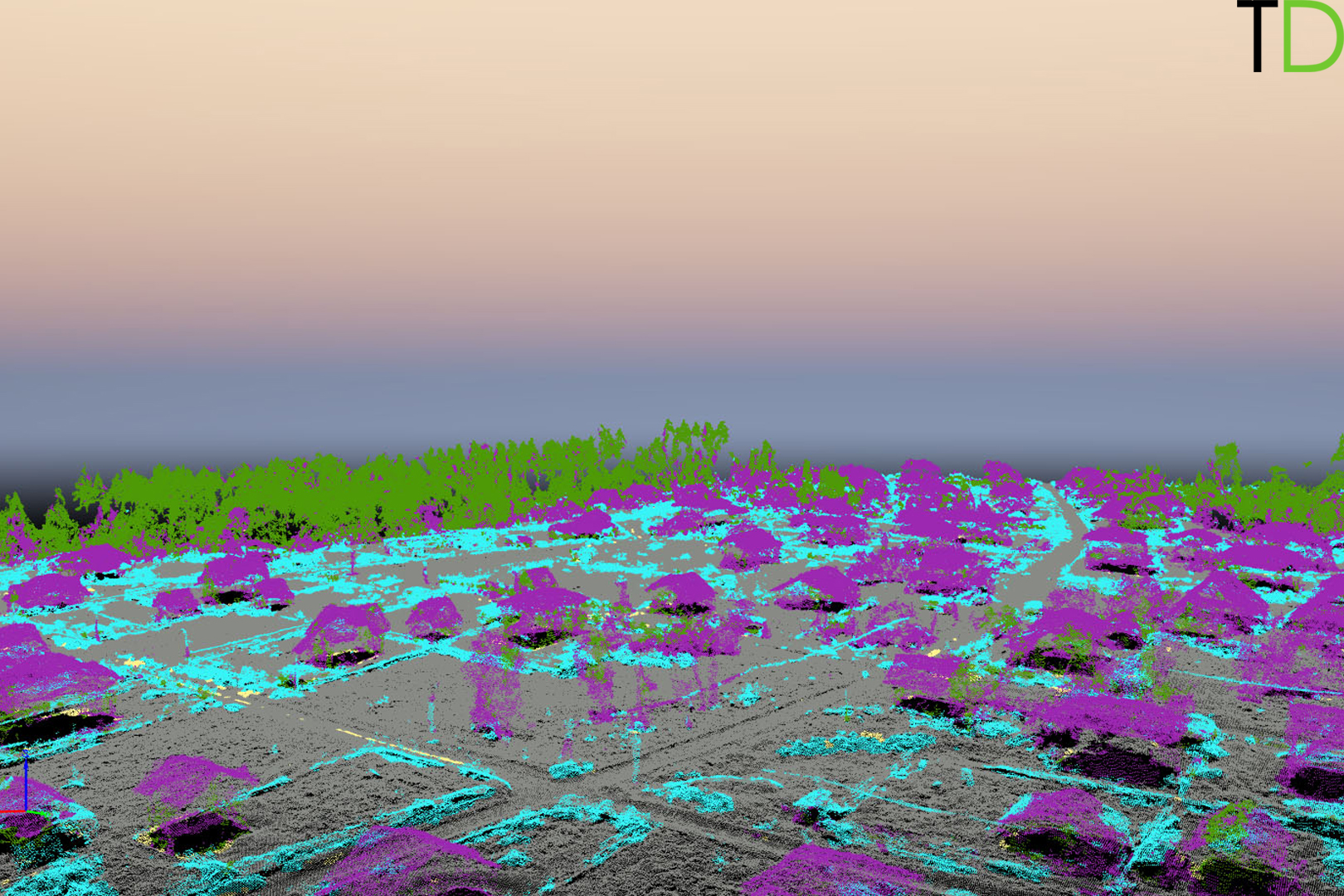
Y este ya es un modelo 3D para esta nube:

En este pueblo rural, la tarea era simple: 5 cm por píxel, paisaje simple, un mínimo de árboles, sin interferencias. Recibimos el ortofotomapa y lo combinamos con el plan catastral:
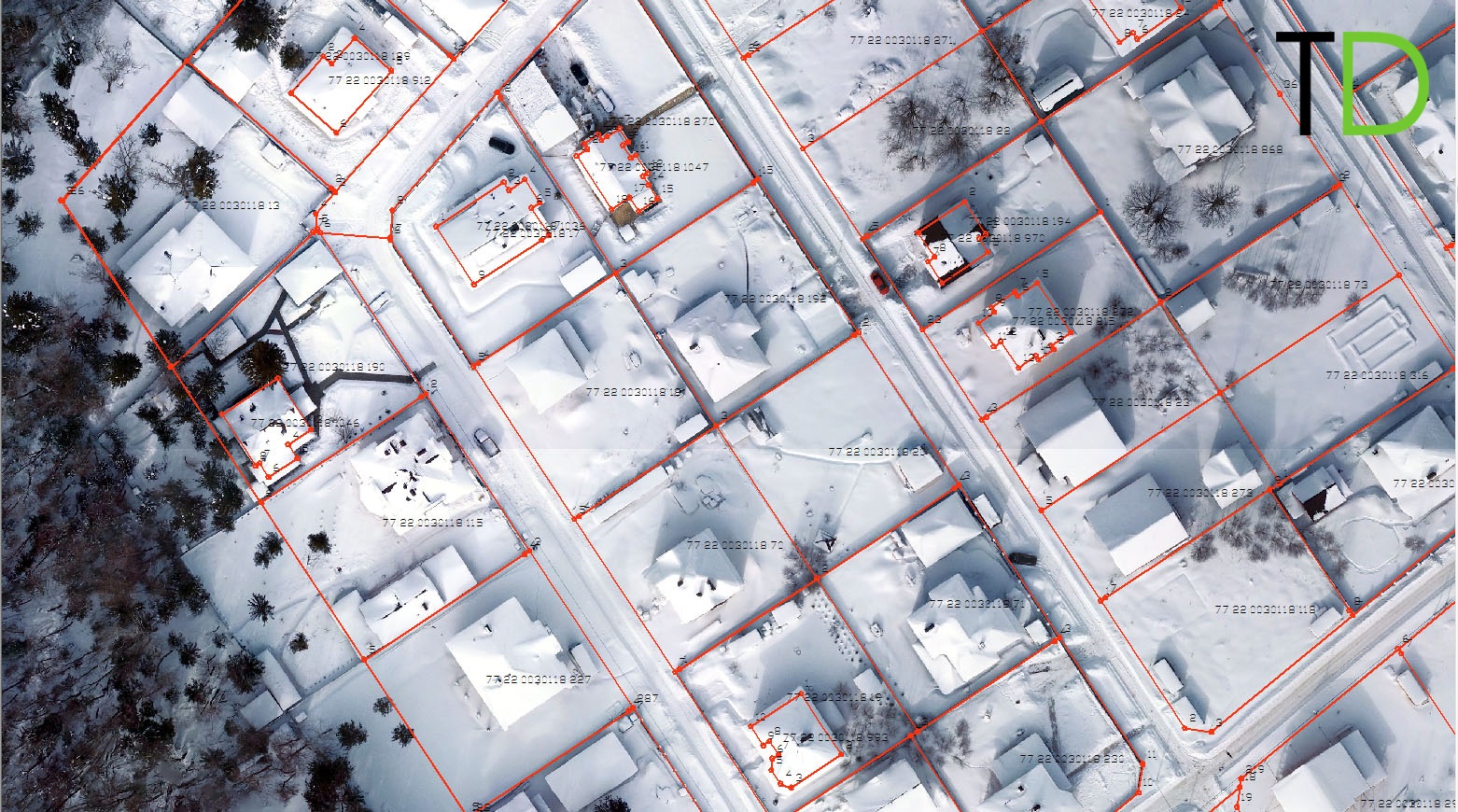
Se puede utilizar para la topografía, el inventario y la valoración catastral de las parcelas, evaluar la efectividad del uso de la tierra, diseñar el desarrollo de territorios, diseñar y realizar trabajos de prospección, reconstrucción y desarrollo de redes viales, monitorear el estado de las comunicaciones terrestres y subterráneas, tuberías, líneas eléctricas, etc. monitoreo de la tierra con fines de protección, monitoreo ambiental de límites y áreas de tierra sujetas a cambios, la creación de modelos de terreno tridimensionales para SIG.
¿Por qué UgCS? Debido a que no hay otras opciones en el mercado, todo lo demás es un nivel amateur. Es muy conveniente que cualquier dron se pueda poner en una misión, y simplemente volará: toda la línea DJI es compatible, incluyendo Maviki y una docena de drones más populares en la geodesia. No hay ninguna unión al hierro en absoluto. Muy buena planificación, desde la oficina. Control normal desde una computadora portátil con un joystick o CLICK & GO, buena geocodificación de imágenes para Photoscan o Pix4D. Hay un software alternativo en el mercado sin tener que llevar una computadora portátil, pero con muchas menos funciones. Una computadora portátil es una gran ventaja, pero también una maldición del sistema: complica enormemente los viajes de negocios. En invierno, todo esto se vuelve aún más complicado debido al hecho de que las baterías de todo el paquete se congelan, y tienes que trabajar con guantes (que no es muy preciso). Pero todavía no hay otras opciones: tales inconvenientes o capacidades limitadas.
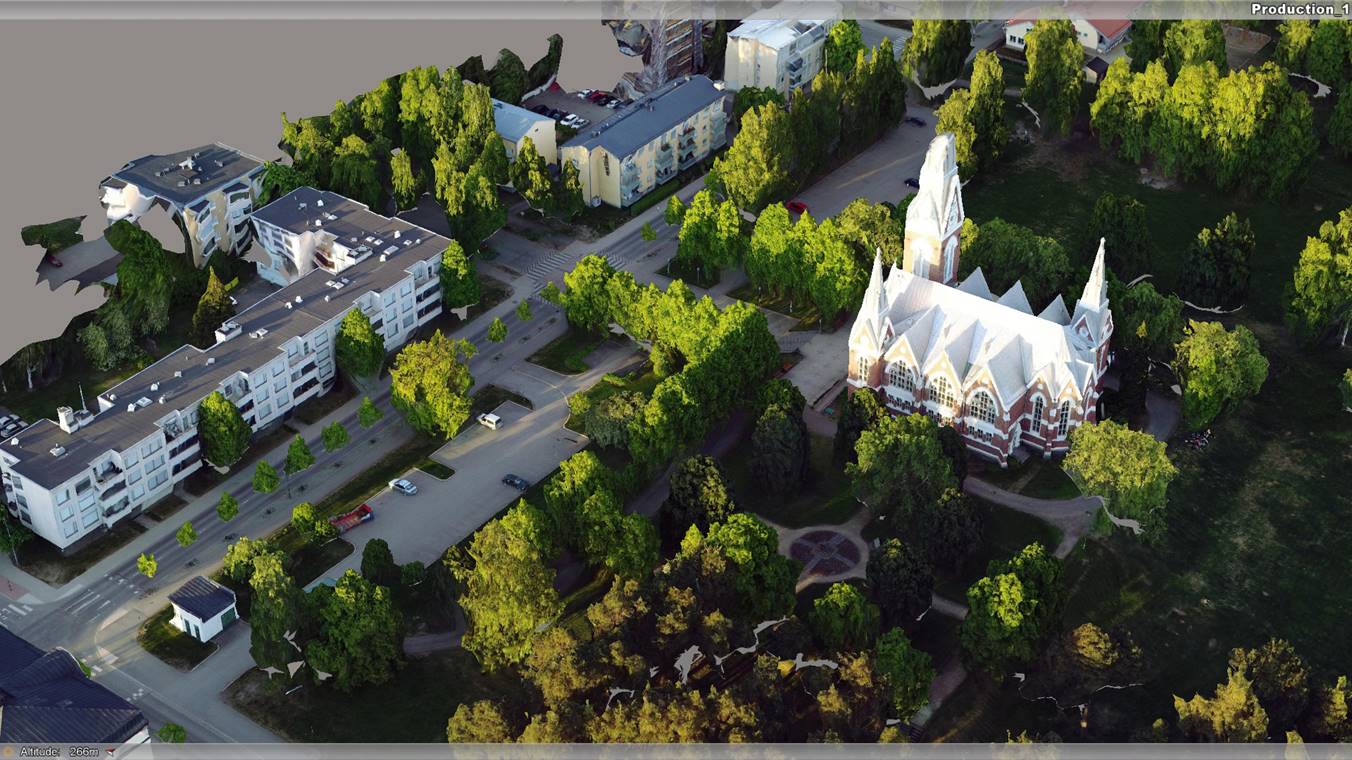
Aquí hay un ejemplo del resultado de un modelo de ciudad tridimensional:
Aquí hay otro objeto: un modelo de cantera tridimensional:


Aquí hay una historia.
Referencias