La evolución es un viaje. Por un lado, esto parece ser un mecanismo simple: las personas que están mejor adaptadas al medio ambiente dan a luz a más niños, y las menos adaptadas no se reproducen tanto, y sus genes se filtran. Por otro lado, fue capaz de generar una increíble variedad de organismos. Algunos animales vuelan con alas emplumadas, otros con membranas estiradas entre los dedos. Algunos corren sobre dos piernas, otros sobre cuatro. Y todo a su manera adaptado a su entorno.
La evolución es poderosa, y los expertos en robótica están recurriendo a este poder hoy para inspirarse. Un nuevo estudio conceptual realizado por científicos australianos está explorando cómo los algoritmos evolutivos pueden generar patas para robots adaptados para caminar sobre ciertas superficies. Los resultados fueron lógicos, contradictorios y extraños, y también insinuaron una nueva forma de hacer máquinas para caminar.
Los investigadores comenzaron con 20 formas aleatorias de patas digitales, limitadas por un cierto tamaño (no necesitamos patas de tres metros de pesadillas). Cada circuito se basa en elementos conocidos como
curvas de Bezier . "La curva de Bezier se puede ver en Microsoft Paint, donde se define una curva para varios puntos de control, solo que los usamos en tres dimensiones", dice el investigador David Howard de la Organización Pública Australiana para la Investigación Científica e Industrial. El sistema proyecta estas curvas en una cuadrícula de píxeles tridimensionales:
vóxeles . "En el punto donde la curva se cruza con el vóxel, colocamos nuestro material", agrega Howard. "Todo lo demás permanece vacío". Como resultado, cada circuito se vuelve único.
La simulación estudia la aptitud de la pierna resultante para caminar en tres superficies diferentes: tierra sólida, grava y agua. Simplemente, en lugar de elegir propiedades como la buena visión o el camuflaje, como ocurre durante la selección natural, el sistema selecciona esquemas para el par que el motor tendría que desarrollar para rotar una pierna de cierta longitud al caminar sobre una superficie determinada. En otras palabras, una buena pierna es una pierna eficiente en energía. También se otorgaron bonos para las piernas que requieren menos material.
"Para la superficie de grava en la que va el pie, calculamos las fuerzas que actúan sobre cada piedra", dice Howard. "Nos da una idea muy precisa de lo que hace el pie en el medio ambiente". Lo mismo sucede con el agua y el suelo sólido.
Luego, los investigadores tomaron 20 de las piernas originales y las combinaron con las que mostraron las mejores. Eligieron las piernas más adaptadas para crear piernas hijas, un poco como las de los padres. "Simplemente lo hacemos una y otra vez", dice Howard. Por mil generaciones. Como resultado, la mitad de la población, que mostró los peores resultados, desapareció, ya que los animales desaparecen en la naturaleza bajo la influencia de factores ambientales. "Y luego aplicamos la adaptación automática al medio ambiente".

En la imagen de arriba, en la primera fila están las patas, que el algoritmo consideró las más efectivas para caminar sobre una superficie dura. La fila del medio se prefiere para la grava, la parte inferior para el agua.
Las patas en forma de cuchilla son una opción lógica para caminar sobre terreno duro. Como es duro, las piernas estrechas no se caerán. "Entonces, las patas para la grava son más gruesas, necesitan huellas más anchas", dijo Howard. Ayudan a las piernas a caminar sobre la grava, no cayendo como raquetas de nieve.
¿Piernas gruesas adaptadas para el agua? Esto sigue siendo un misterio. "Algo extraño sucedió con el agua, esperábamos algo que pareciera cuchillas, como caminar sobre una superficie dura", dijo Howard. Esto les permitiría atravesar el agua. También puede esperar extremidades más delgadas del sistema, dadas todas las tareas iniciales. “Pero las piernas estrechas no funcionaron. Todavía no estamos seguros de por qué ".
También fueron bastante extrañas algunas protuberancias, especialmente en las patas destinadas al suelo. "Nos gusta la teoría de que tienen su propio objetivo", dice Howard. Pero, de hecho, cuando se marca la curva de Bezier en la red vóxel, su parte, que parece inútil, es en realidad parte de una curva mucho más grande que proporciona estructura dentro de la pierna ". Las protuberancias se ven brutales, pero en realidad, son solo artefactos que no ayudan, pero que tampoco interfieren con las piernas. Howard y sus colegas modificaron el sistema para que los reconociera y los eliminara automáticamente.
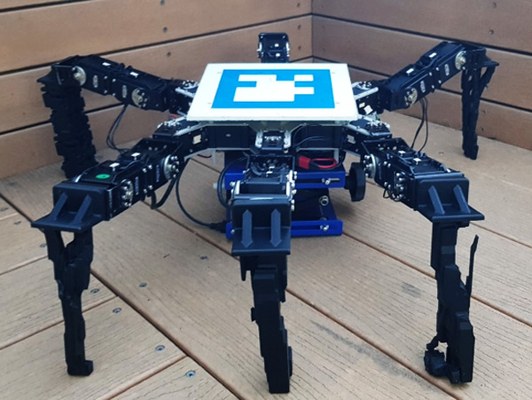
Los investigadores imprimieron estas patas en una impresora 3D y las conectaron a un robot de seis patas. Ahora planean probar su efectividad en una superficie real en comparación con las piernas diseñadas por humanos. El equipo ya ha cargado ejemplos de tales piernas en el simulador, y resultó que las piernas obtenidas como resultado de la "evolución" no son peores, y a veces mejores, artificiales.
¿Por qué necesita gastar esfuerzo en simular la evolución de los robots? Por ejemplo, puede darle al robot una especialización estrecha para moverse sobre una determinada superficie y no basarse en patas de uso generalizado. Teóricamente, esto permitirá que el robot se adapte mejor en ciertas situaciones, por ejemplo, al superar las dunas de arena.
"Si desea utilizar el robot en un entorno diferente, simplemente puede reiniciar el algoritmo", dice Tonnes Nigaard, que estudia el cambio de forma bajo la influencia de la evolución de los robots en la Universidad de Oslo, y no participó en este trabajo. "Si desarrolló un sistema diseñado específicamente para un propósito específico, en las etapas posteriores del diseño, esto ya puede ser imposible".
El sistema Nigaard, un robot de cuatro patas con patas telescópicas, evoluciona sobre la marcha. Por prueba y error, es decir, a menudo cayendo, aprende a caminar, por ejemplo, sobre una superficie helada, acortando sus piernas para bajar su centro de gravedad. En el interior, puede alargarlos para aumentar la longitud del paso y aumentar la eficiencia del movimiento. Es posible combinar estas dos tecnologías: use la simulación para desarrollar un diseño de pie adecuado y luego conviértalo en una máquina real que pueda cambiar.
Y si la evolución logra hacerlo bien, entonces es sorprendente. "La evolución busca respuestas en una gama mucho más amplia de opciones", dice Howard. "No le importa cómo se ve la cosa resultante". Puede parecer completamente contradictoria, no como un ingeniero humano hubiera pensado. Pero si funciona, nada más importa ".