En el contexto de lo queDespués del inicio de emergencia de la Unión, el distinguido
Zelenyikot escribió un inspirador
post- brindis por la salud del programa espacial. Y aquí está lo que encontraron los comentarios:
Un número significativo de ciudadanos de Khabrovsk cree que el desarrollo de la astronáutica es principalmente el desarrollo de la astronáutica
tripulada . Así fue en el pasado, y así debería ser en el futuro.
Al mismo tiempo, muchos residentes de Khabrovsk creen que los programas espaciales tripulados, en particular el trabajo de los equipos de la EEI, estimulan poderosamente el desarrollo de nuevas tecnologías y ciencia en general. Las personas en órbita están haciendo algo inteligente, complejo y muy, muy importante. Y aún más personas increíblemente inteligentes trabajan en laboratorios terrestres, proporcionando estos experimentos: reflexionan, procesan los datos invaluables obtenidos, crean herramientas de precisión difíciles al borde de la ciencia ficción, sin las cuales estos experimentos no pueden llevarse a cabo ...
Propongo ver cómo funciona todo, en un ejemplo concreto.

Resumen: misceláneo, falta de tolerancia, nenashi. Y un poco sobre la preparación del espacio. (+ Criticar - ¡oferta!)
La parte real, TTX: un poco de análisis: lo que está oculto detrás del TTX, cómo es el objetivo de los drones dentro de la estación orbital y cuál es su destino en la ISS real; ¿Por qué resulta? ¿Y cómo podría ser? Escalando en fantasías convirtiéndose en Año Nuevo1. Descripción general del dron1.0. Lugar: ISS¿Por qué la idea de los drones es atractiva en la EEI?
Es suficiente recordar las principales afirmaciones de los drones cuando se usan en tierra:
- muy ruidoso;
- corto tiempo de vuelo.
Tanto el primero como el segundo debido al hecho de que los motores del dron tienen que lidiar con la gravedad. Los motores se ven obligados a trabajar por encima de un cierto umbral de potencia (de lo contrario, el dron simplemente no despegará). Los motores eléctricos se comen rápidamente la batería; Los devanados y tornillos cargados que baten el aire a altas velocidades crean un sonido agudo y potente.
En la ISS, donde no hay gravedad, los motores pueden funcionar tan débilmente como quieran. Puede consumir muy económicamente la batería; No habrá ruido fuerte.
Por otra parte Dado que la propia ISS es un lugar bastante ruidoso (ventilación forzada, muchos bastidores con equipos que operan constantemente, sistemas de soporte vital y mantenimiento de orientación de la estación: el consumo total es de aproximadamente 50 kW), el dron, con un funcionamiento moderado del motor, aunque formalmente hace un sonido, pero en la práctica Sus propósitos pueden considerarse silenciosos. No será otra molestia sonora molesta para las personas en la estación.
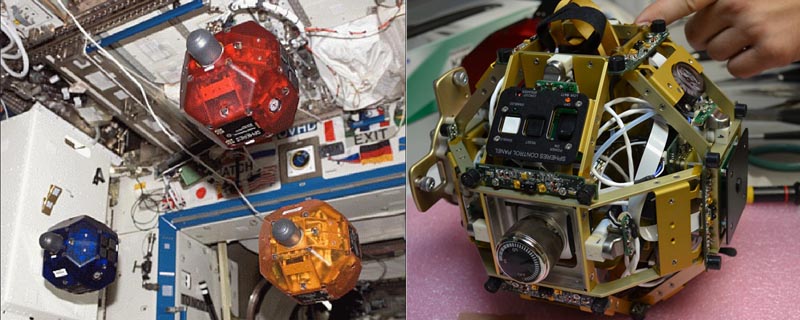
1.1. Esferas (EE. UU.)Según el pasaporte, con el juego de acrónimos: ESFERAS (Satélite de posición sincronizada, reenfocar, reorientar los satélites experimentales). Propiedad de la NASA. Creado en MIT por la subvención DARPA.
Peso: 4.3 kg.
Tamaño: 22 cm.
 (Fuentes de materiales gráficos: NASA, JAXA, ESA.)
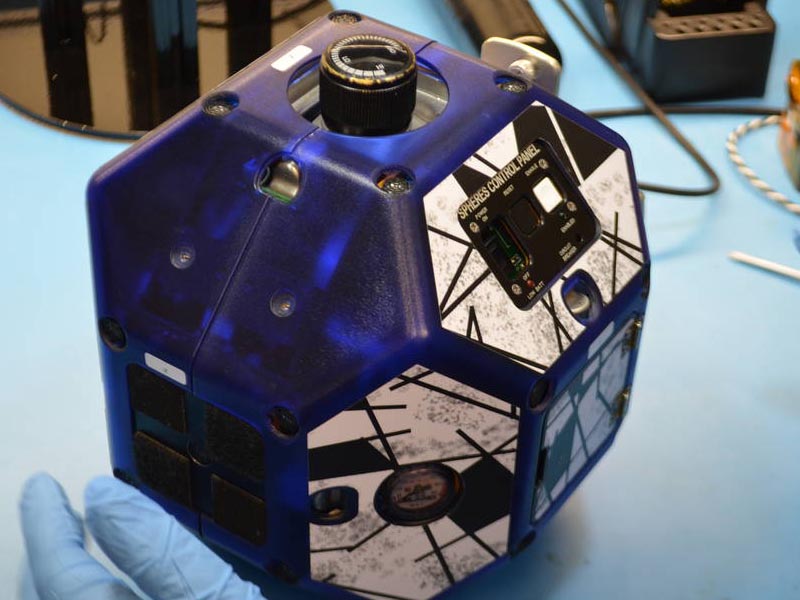
(Fuentes de materiales gráficos: NASA, JAXA, ESA.)Varios drones idénticos, de los cuales tres cayeron en órbita: azul, rojo y naranja. First Blue, en 2006. Un poco más tarde, el resto, con firmware mejorado.
Estos no son del todo drones en el sentido de que ponemos "drones" en la tierra, lo que significa principalmente helicópteros aficionados (quadro) o profesionales (hexo, octo). Las esferas no son helicópteros. No tienen tornillos, sino boquillas. Pura propulsión a chorro, gas comprimido.

El cilindro se carga a 170 g. Desde allí, el gas se distribuye a 12 boquillas. Aceleración máxima: 17 cm / s
2 en movimiento, 3.5 rad / s
2 en rotación.
Pero esto es precisamente lo que son las aceleraciones máximas, en funcionamiento normal, las aceleraciones no son casi las mismas. En experimentos reales, las esferas se mueven
muy lentamente .
Comunicación completa: canales de radio a frecuencias de 868 y 917 MHz.
Alarma: señal infrarroja.
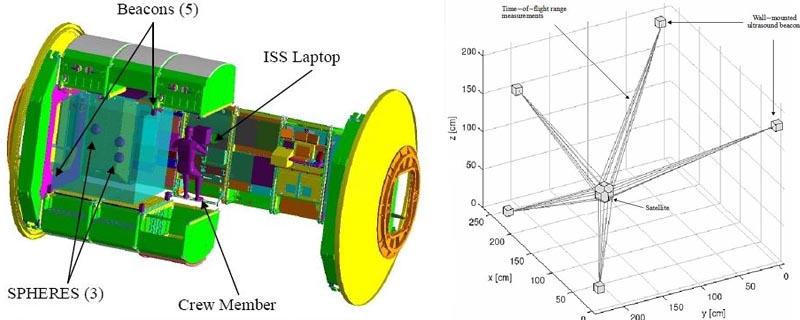
Sensores: receptores ultrasónicos.
No hay cámaras de video, pero se proporcionan soportes para el kit de carrocería. Al principio, la unidad VERTIGO se usaba como cámara de video, cuya base son dos cámaras para crear imágenes estéreo. Luego, cuando los teléfonos inteligentes se propagan, solo un teléfono inteligente.

Inicialmente, la navegación estaba en receptores ultrasónicos. Estos ni siquiera son sensores de distancia; ellos mismos no emiten ultrasonido. Para esto, se fijaron 5 balizas dentro del laboratorio estadounidense. Cuando necesite determinar su posición, Sphere emite un destello infrarrojo. Esta es una señal para las balizas. Se turnan, con diferentes retrasos, dan una señal ultrasónica. La esfera capta estas cinco señales. El retraso inicial diferente es necesario para que las señales no se superpongan, y el análisis es lo más simple y confiable posible; por lo tanto, las balizas ni siquiera tienen firmas diferentes. El tiempo real de llegada de la señal le permite calcular el retraso secundario asociado con la distancia desde la esfera a cada una de las balizas.
Todo es lo más simple posible. Quizás porque los estudiantes comenzaron a desarrollarse, lo cual fue tomado débilmente por su supervisor, recordando un
episodio de una famosa película infantil .
Los desarrolladores consideraron que la parte electrónica de los drones es el lugar más vulnerable, debido a la radiación cósmica. Pero los drones pasaron más de diez años en la estación, y los problemas con el sistema de distribución de gas llegaron a las boquillas. Sin embargo, resultó ya en el suelo, durante la reparación del Azul, lanzado en el "Dragón".
Síntomas similares, no tan graves, superaron a Orange, pero hasta ahora permanece en la estación.
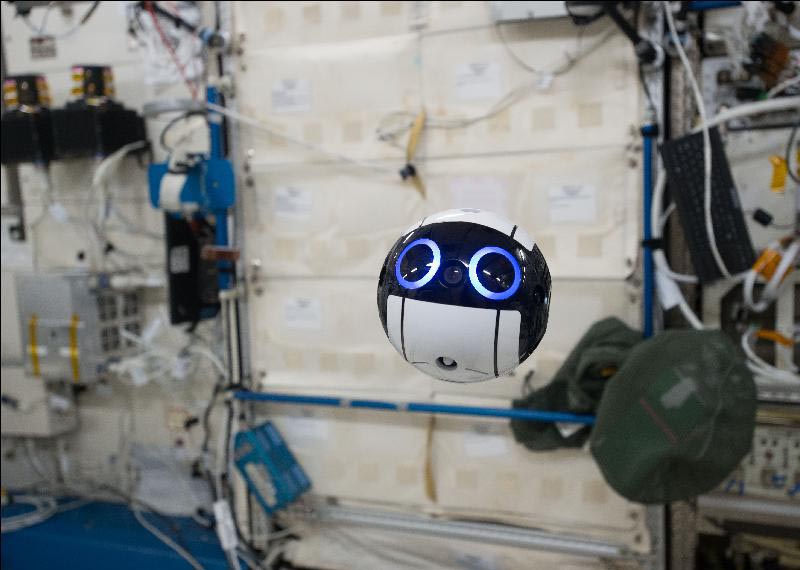
1.2. Pelota (Japón)Int-Ball (cámara interna de bolas). Propiedad JAXA.
Peso: 1,4 kg.
Tamaño: 15 cm.
Esta mimimi voladora fue entregada a la ISS en el verano de 2017, pero comenzó a usarse seriamente solo un año después, cuando un astronauta japonés estaba en la estación. Sin embargo, formalmente y ahora el estado de la pelota sigue siendo un reajuste.
Para moverlo tiene 12 respiraderos pequeños. Pero para la rotación, ya hay un bloque de gyrodynes.
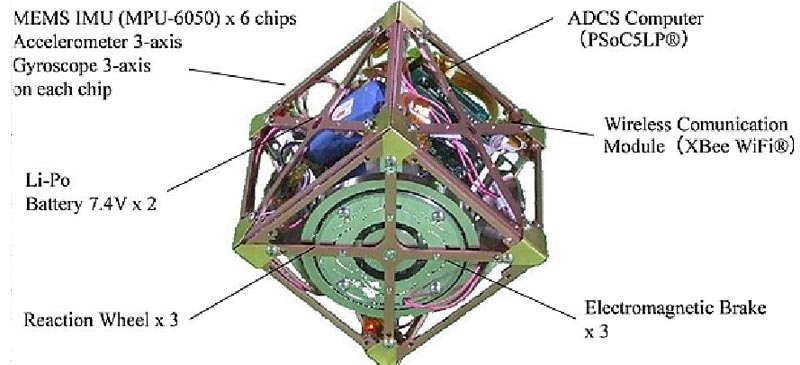
Hay una conexión inalámbrica directa, sin muletas (como las esferas) a las computadoras portátiles de la estación.
Puede pensar que hay cámaras de video en los ojos, pero no.
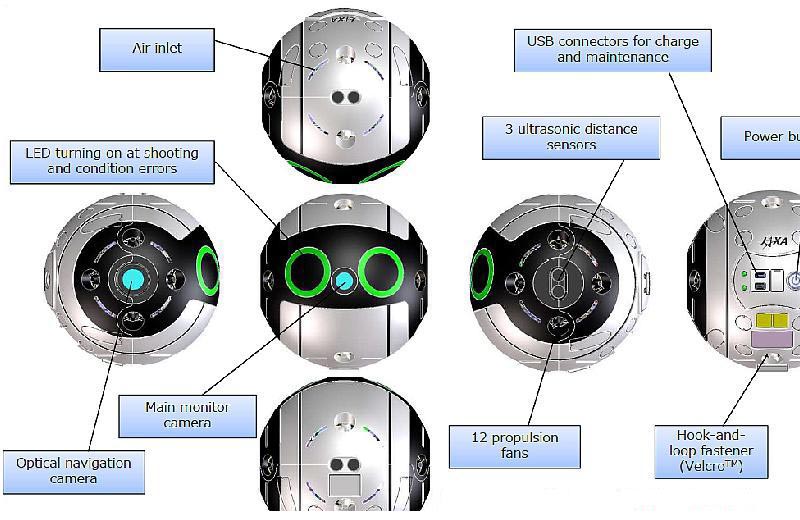
Videocámara casera en la nariz. Los ojos son solo indicadores. En realidad son grises. Cuando brillan en azul, esta es una señal de que la cámara principal está funcionando. En caso de una falla del sistema, se vuelven rojas y la vista de la bola se vuelve inesperadamente agresiva.

La bicicleta ya está caminando, y por primera vez, la pelota asustó al astronauta estadounidense que no esperaba tal cosa.
Desde el lado de estribor hay una cámara auxiliar, navegación. Para ella, se colocaron dos marcadores en el laboratorio japonés (esa mancha rosa vyrviglazno-rosa). Por lo general, se encuentran en diferentes extremos del módulo, uno debajo del umbral y el otro en la cubierta de la mini puerta de enlace, pero se pueden mover libremente.
En el lado izquierdo de la pelota hay sensores de distancia ultrasónicos.
En relación con problemas de moda, se enfatiza que las partes del cuerpo se imprimieron en una impresora. (Y luego fueron pulidos y pulidos durante mucho tiempo, los milagros no suceden).
En el modo fuera de línea, la pelota aún no ha funcionado. Su movimiento es controlado por dos operadores en el CCM japonés.
Una vez al mes, el
diario de video se actualiza.
1.3. Simon (Europa, más específicamente Alemania)CIMON (Crew Interactive Mobile acompañante), en honor del
Prof. Simon Wright Bajo los auspicios de la ESA, realizado por el Centro Alemán de Aviación y Espacio en las instalaciones alemanas de Airbus, con la participación de IBM.
Peso: 5 kg.
Tamaño: 32 cm.

Entregado a la ISS "Dragón" este verano.
Todavía no se ha enviado una descripción detallada, solo hay datos más generales: 14 tornillos. En la nariz hay un monitor y una cámara de video, a los lados hay dos más auxiliares.

Sistema Linux. IBM hizo una versión portátil de
Watson , que no requiere docenas de servidores o conexión a tierra.
Si de repente decidiste que los drones son algo "¡con la IA de IBM!" pueden maniobrar normalmente, y ahora por fin se
ve al menos un poco
genial : aquí están
sus disparos en toboganes . En la primera prueba, resultó que su capacidad calculada para maniobrar es más débil que los restos de no inercia en el laboratorio de vuelo europeo (llamado con orgullo ZERO-G).
Se planeó que en octubre el alemán Alexander Gerst comenzará a trabajar con él, el reconocimiento de voz y rostro fue encarcelado por él. Y en el invierno, Simon será bajado de nuevo al suelo. Pero, aparentemente debido a la
infección de la estación con gremlins malvados , los plazos se han movido. Puedes conocer el comienzo en
el twitter de Gerst .
2. AnálisisBueno, ¿por qué los drones en la ISS?
Hay declaraciones ceremoniales de los creadores, hay comunicados de prensa de las agencias, pero está claro que, en su mayor parte, todo esto es una charla burocrática ociosa, donde las perspectivas se hinchan como una rana a través de una tubería, y se notan preguntas incómodas debajo de la alfombra.
2.1. ¿Para qué son las esferas?En primer lugar, intentemos comprender: ¿es razonable el diseño?
Hay aire dentro de la ISS. Pero los motores de las esferas utilizan un principio puramente reactivo. Esto significa que cuando el dron se está ejecutando, hay un recurso que se desperdicia constantemente. La pregunta lógica es: ¿cómo se repone este recurso? ¿Quizás pueda reabastecer el dron directamente a la ISS (es decir, desde un punto de vista práctico, no se desperdicia ningún recurso)? ¿Quizás se entregó un compresor a la ISS junto con el dron? No El dron utiliza cilindros intercambiables con dióxido de carbono licuado. Después de usarse en un avión no tripulado, deben bajarse al suelo, reabastecerse de combustible allí y elevarse nuevamente a la EEI.
Además, incluso la energía eléctrica del dron no está en la batería, lo que parecería obvio, sino en las baterías. Baterías AA desechables, dos paquetes de 8 cada una. Cambie a fresco cada vez antes de usar, aproximadamente debería ser suficiente durante 2 horas. Después de lo cual solo pueden enviarse al suelo, y el dron necesita unos nuevos.
¿Cómo puede justificarse una decisión tan extraña?
¿Tal vez la idea era que, aunque el dron funcionará dentro de la ISS, simula el movimiento fuera de él, en el vacío? Donde no hay aire? ¿O tal vez incluso en caso de que ocurra la despresurización de ISS? Luego podría moverse dentro de la estación en el vacío, al igual que un dron con tornillos no pudo. Eso podría ser útil. La forma habitual de encontrar una fuga es por sonido, pero este método solo funciona si la fuga es pequeña y el aire se escapa lentamente.
Pero los propios creadores dicen que el dron no está diseñado para usarse en el vacío.
Entonces, tal vez, ¿encontraremos la razón en los experimentos en los que se usaron estos drones?
Experimento de anillo
Dos esferas, para cada una se agrega un kit de cuerpo con inductores (anillo). De esta forma, los drones pueden interactuar magnéticamente: repeler, atraer y torcerse mutuamente. Se cobran entre sí sin contacto.
Cual es la idea. La razón para completar la mayoría de las misiones espaciales (¡exitosas!) Es que el combustible está agotado. El dispositivo elaboró su programa básico, y aún funciona perfectamente, podría servir y seguir sirviendo, eso es solo que no hay más combustible en los motores. Es imposible corregir aún más la ruta de vuelo. Peor aún, es imposible descargar gyrodines, y el dispositivo ya no puede mantener la orientación de la antena al suelo y los paneles al sol: la conexión al suelo, la energía se pierde ... ¿Es posible prescindir del consumo regular del propulsor? Si coloca varios de estos "anillos" (por ejemplo, en la superficie de la EEI), puede conducir un pequeño satélite entre ellos tanto como desee sin gastar combustible, suficiente energía, lo que generalmente no es un problema.
A nivel de palabras comunes, todo esto es divertido. Pero es difícil imaginar un caso de uso real: ¿dónde y para qué propósito práctico puede ser necesario?
Además, el experimento en sí, en la forma en que se realizó, es completamente inútil, por lo que se hicieron cosas elementales en él.
Que da ¿Para qué fue eso?
Experimento de vértigoDesde 2008, comienzan las propuestas e intentos de actualizar Spheres para que su navegación no se base en balizas, sino en análisis de video. En 2010, el proyecto toma el mismo DARPA para financiamiento, incluidos estos puntos para el dron. Parece que la idea obvia y útil es trabajar en una versión tridimensional con el hecho de que los prototipos de pilotos automáticos de automóviles ahora se fabrican en una versión bidimensional. Además, emprendido antes de que este tema se convirtiera en un boom.
Pero esto es por un lado. Por otro lado, la implementación del dron en forma de Esfera es la menos adecuada para esto.
Incluso si cierra los ojos al hecho de que las esferas son terriblemente lentas, ¿qué pasa con el hecho de que el inicio del vuelo requiere una pérdida de tiempo humano (verifique la presión en el cilindro y reemplácelo si es necesario; reemplace los paquetes de baterías por otros nuevos), y las horas de vuelo son muy limitadas (frecuente cambio de cilindros y baterías, y con entrega desde el suelo)?
"Experimento" Halo
Entre comillas, porque el proyecto es que hay un parachoques montado en el dron, en el que puede colgar cualquier otra cosa.
Probablemente habría tenido algún sentido, si el avión no tripulado se pudiera utilizar como inspector de aviones no tripulados al menos dentro de la estación. Pero las esferas no se pueden usar así, no el TTX. Entonces, ¿por qué eso es todo?
Pero para que. Por ejemplo, se colgaron "unidades de acoplamiento" en los kits del cuerpo, y los drones se acoplaron entre sí. ¿No es un milagro?
O aquí hay otro: dos drones atados con una cuerda, y observaron cómo uno puede tirar del otro. Y resulta que esto es una imitación de la captura de desechos espaciales. Asombroso! ¿No es así?
Experimento Splash (Slosh)
A la viga especial se unen: en los extremos hay dos esferas, y en el medio hay un globo transparente parcialmente lleno de líquido.
Las esferas se utilizan para torcer, sacudir, oscilar, etc. La cámara al lado del cilindro saca lo que sucede dentro. Se utilizaron diferentes grados de llenado y líquidos con diferentes propiedades.
Está claro que, en primer lugar, esto es una analogía de lo que puede suceder en tanques con combustible cuando se encuentran en un estado cercano a la gravedad cero. Por lo tanto, el experimento se lleva a cabo con la participación de grandes fabricantes reales.
En general, este experimento parece el más convincente de todos los demás. ¿Qué nos hace usar reservas de todos modos? Un diseño con un balancín y esferas como sus aceleradores es algo extremadamente torpe. El trabajo de los propulsores de las esferas, especialmente con el paso del tiempo, está lejos de ser preciso. El uso de Spheres como parte de la instalación impone restricciones estrictas sobre la duración del experimento, es imposible llevarlos a cabo durante mucho tiempo y en un modo automatizado (sesiones con Spheres, un par de horas en unas pocas semanas). Parece que si hubiera un interés real en tales experimentos, se asignaría un lugar en los bastidores y se instalaría un pequeño agitador de aparatos allí, afilado para tales experimentos. Y si no había lugar en los bastidores, entonces incluso: ¿no era más razonable hacer un marco con girodinos alrededor del cilindro que unir extremos largos en los que se cuelgan las esferas, bastante voluminosas, pero débiles e inexactas en términos de las aceleraciones que se crean?
Es decir, persisten las dudas sobre la necesidad de Esferas para tal experimento. Y están respaldados por el hecho de que todos los siguientes modelos de drones no se han probado para nada como esto.
Entonces, ¿por qué se necesitaban las esferas?Deje que los estudiantes experimenten: ¿es su experiencia e interés en entrar en la esfera espacial más importante que los beneficios reales de Esferas específicas en la EEI?
O, sumergiéndose en la teología de la conspiración, todo lo contrario: ¿DARPA financió este proyecto para confundir a los valientes militares rusos y chinos? Mira, ¿qué indefensos prototipos de inspectores satelitales se nos acercan ... Si tuviéramos buenos inspectores satelitales, financiaríamos tal abrazo y llanto? ¡No tenemos inspectores satelitales!
¿O es que los burócratas adicionales de la NASA y DARPA, que no tienen ningún uso real, se ven obligados a crear la apariencia de trabajo para justificar su existencia? ¿Es todo esto simplemente "dominar" los fondos? Y al mismo tiempo, el llenado formal del horario de trabajo de los astronautas "no es en vano, ¿los llevamos de ida y vuelta"?
2.1. ¿Por qué necesitamos una pelota?Aquí el objetivo se establece de inmediato, de forma muy clara y convincente.
Echemos un vistazo a cómo se organizan los experimentos con personas en la EEI.
Un hombre, todavía en la tierra, enseña un plan de trabajo, entrena. Pero! Dado que las personas están siendo abandonadas en la EEI durante seis meses, y hay pocas, es imposible preparar al astronauta de manera ideal para cada uno de sus experimentos, y hacerlo con la habilidad de un asistente de laboratorio que ha estado trabajando con ese equipo durante años. Pero se requiere un experimento más o menos rápido, no aburrido, hay un horario. Por lo tanto, casi todos los experimentos están bajo la supervisión del CCM. El astronauta monta una cámara en el soporte, apuntando al lugar donde trabajará. Y el CCM no solo puede responder sus preguntas, sino también corregir de inmediato si ya está haciendo algo mal, sin darse cuenta él mismo.
Por supuesto, una cámara fija en el soporte no es una opción ideal. A veces quieres mostrar una imagen de cerca, lo que está debajo de sus dedos. A veces esto es realmente importante. El experimento puede posponerse o cancelarse, pero en el caso de la prevención o reparación de sistemas de soporte vital no hay a dónde ir, y un error puede generar grandes dificultades. Por lo tanto, debe llamar a alguien de la tripulación para pedir ayuda: uno está trabajando, el otro está sosteniendo la cámara y se quita por encima del hombro.
Los japoneses afirman que preocuparse por las cámaras toma hasta el 10% del tiempo.
Aquí, por supuesto, no está completamente claro si esta afirmación no es astuta: consideraron el tiempo de los astronautas dentro del trabajador, o incluyeron todo lo que pudieron: a los astronautas en su tiempo libre les gusta fotografiar en ojos de buey; se considera una buena forma para que todos graben su video tour de la estación, al menos una vez por expedición; necesita mantener vlogs y participar en puentes de video, ya que esto se requiere para su divulgación / por razones políticas y de imagen. Entonces, en realidad, el porcentaje de tiempo puede ser diferente.
Pero esto no cambia la esencia: ¿por qué no liberar este tiempo para algo realmente útil?
La pelota se declara como una cámara de movimiento universal, lo que debería ahorrar esta vez.
¿El dron funciona así en realidad?El balón muestra una imagen bastante mediocre (si se compara con cámaras completas con buenos objetivos montados en la ISS en los soportes). ¿Y qué otra imagen puede venir de una cámara compacta con una lente pequeña?
La movilidad es aún peor. Las limitaciones en la alegría de Sharik están obviamente relacionadas con el reaseguro, el poder de los tornillos se subestima especialmente. Esto se puede cambiar en el futuro si la parte del software (navegación de imagen y maniobras) es confiable y eficiente. Pero este es solo el gran problema. Si tomamos tecnologías similares "terrestres" como punto de partida, lo que se está haciendo en el campo de los pilotos automáticos de automóviles, entonces parece que estos especialistas y desarrollos no estuvieron involucrados, y en JAXA todo se hace desde cero, casi por principiantes en este campo.
Sin embargo, el mayor problema ni siquiera es eso. Supongamos que la pelota puede reconocer con confianza el entorno y maniobrar con precisión en él. ¿Es esto suficiente para que el dron se convierta en un operador asistente, como, por ejemplo, otro miembro de la tripulación con una cámara?Los propietarios de drones son conscientes de la respuesta. El piloto automático funciona bien cuando se le asigna una tarea clara: se ingresan los puntos de control de trayectoria o se establece el objeto principal. En el caso de un automóvil, tal caso de uso es bastante conveniente. En el caso de los drones, se requiere más: interacción con el operador a medida que se refina la tarea de vuelo, incluidas las condiciones de aterrizaje que no se especifican de antemano (recuerde todas las historias divertidas, a través de las lágrimas, de drones que no se entregaron al propietario).Para un drone asistente en la ISS (un asistente en realidad, no un comunicado de prensa), requerirá principalmente la interacción con una persona. Conveniente interacción. No superficialmente, a nivel de comandos verbales claros o gestos prescritos formalmente como un controlador de tráfico. Y como sucede en el caso de dos personas reales que hacen algo juntas. Usted predice las acciones e intenciones de otras personas al comienzo del gesto, de acuerdo con el lugar donde se dirige la mirada, como un orden alentador, puede haber solo una mirada rápida y otras reacciones de comportamiento simulado, obvias en la situación real y extremadamente difíciles de formalizar.Pero para que esto se convierta en realidad, el dron debe estar equipado con una inteligencia artificial muy inteligente, capaz no solo de maniobrar, sino de comprender lo que está sucediendo. De lo contrario, su uso no será de ayuda, sino otra tarea difícil que el astronauta tendrá que tener en cuenta en paralelo con el trabajo principal. Solo habrá exceso de carga, irritación, errores.El desarrollo de tal interacción ahora está en su infancia, principalmente porque en este estado se desarrolla una IA fuerte. Sin crear una IA fuerte, esta tarea puede tener, en el mejor de los casos, una solución similar a los traductores automáticos actuales, una interlineal con errores que una IA fuerte debe corregir en forma de persona. Sin una IA fuerte, el dron asistente deberá ser monitoreado constantemente de una forma u otra, ¡e intervendrá regularmente en sus acciones! - operadores en tierra.2.3. ¡Y aquí está Simon!Aparentemente, los desarrolladores de Simon entienden esto. También entienden que desde un punto de vista económico, el esquema utilizado por los japoneses con Sharik, al menos dos especialistas empleados permanentemente en la tierra para ahorrar el 10% del tiempo de un cosmonauta, es, en el mejor de los casos, una fiesta.Por lo tanto, se establecen otros objetivos.Simon simplemente seguirá discretamente al propietario, será su asistente de voz, además de recopilar datos para un análisis psicológico de la condición de la tripulación.Eso es Se propone llevar tecnología ya implementada en drones terrestres. Luego dele al astronauta en órbita un asistente de voz artificial (leído, tonto), cuando el astronauta en sus auriculares ya tenga asistentes en vivo en el CCM. Y como una cereza, haga una versión pasiva de lo que se está haciendo en la tierra de forma activa, utilizando métodos mucho más sofisticados en proyectos como "Mars 500". Si este no es un gran paso para toda la humanidad, entonces, ¿qué es?A pesar de todo esto, Simon todavía puede ser un beneficio real. Simplemente no está relacionado con todo lo anterior, no es obvio para los compiladores de comunicados de prensa.2.4. Preparación del espacioSi mira videos de la EEI cuidadosamente, prestando atención al comportamiento de los astronautas, notará algo curioso, nada obvio de antemano, incluso si conoce bien la física y comprende qué es la ingravidez.Un hecho empírico: es más fácil para una persona en gravedad cero lidiar con cosas grandes y masivas que con cosas pequeñas y livianas.Las dificultades comienzan cuando sueltas algo pequeño.Parecería, ¿cuál es el problema?
Bueno, simplemente "pon" una cosa en el aire, y colgará allí. Gravedad cero! ¿No es más conveniente que en la tierra, donde una cosa puede caer, y antes de soltar algo, necesita encontrar algún soporte confiable sobre el cual colocarlo?El problema es que una persona no puede "poner" una cosa en el aire con suficiente precisión. En la tierra, estamos acostumbrados a poner cosas en diferentes superficies, pero siempre con gravedad. Lo soltó, y la fuerza de la gravedad empuja hacia la superficie, y la fuerza de fricción no permite moverse hacia los lados. Existe la ilusión de que una persona misma puede dejar las cosas en reposo tan precisamente porque él idealmente controla sus movimientos y aplica la fuerza.En gravedad cero, esta ilusión se disipa rápidamente. Resulta que si una persona quiere "poner" una cosa en el aire, como la dejó sobre la mesa, esto ya no funciona.Incluso si una persona está tratando de dejar al sujeto inmóvil en el aire, soltando y retirando su mano con mucho cuidado, el sujeto aún se moverá con una pequeña velocidad residual. Y si una persona suelta algo pequeño como caminar, sin mucha atención ... A primera vista, la velocidad de una cosa no es tan significativa. Pero es constante y no irá a ninguna parte. Y en solo unos segundos resulta que el objeto va más allá de los límites a los que puede llegar el astronauta, simplemente estirando la mano. Y se requiere alguna solución. O deja que la cosa se vaya, pero luego tienes que volar detrás de ella con todo tu cuerpo, y no solo mover la mano, o debes agarrar la cosa ahora mismo y traerla de vuelta. (Por ejemplo, preparar una tableta : la atención no está en la cara del hablante, sino en sus manos).Es mejor esperar y no soltar más. ¿Pero si quieres interactuar con varios objetos al mismo tiempo?No puede dejar colgado uno de los elementos durante más de unos segundos. Debes volver constantemente a este tema y "cambiarlo", alejándote flotando.Y si el elemento es una tableta, en la pantalla de la cual está viendo algo, y su cámara debe dispararle, el problema se agrava por el hecho de que, además de las velocidades residuales, también hay una velocidad de rotación residual. La tableta no solo flotará lentamente, sino que también se alejará lentamente de usted.Todo esto lleva al hecho de que los astronautas sostienen en sus manos con lo que están trabajando o se dedican a la preparación del espacio: corrigen constantemente los objetos que quedan suspendidos en el aire.Muchos fanáticos de la astronáutica, incluso después de ver una buena cantidad de comerciales de la ISS, no se dan cuenta: casi todos los artículos en la estación tienen calcomanías adhesivas. Y las piezas de velcro madre aquí y allá en las "mesas", "bancos de trabajo", las paredes de la estación, algunos de los módulos están cubiertos completamente con él. Además del velcro, hay bolsillos de malla de goma en la estación aquí y allá. Y algo se aferra a los mosquetones. Para computadoras portátiles y soportes de cámaras. Todo esto con el mismo propósito: resolver de alguna manera el problema de la preparación del espacio.Y en este sentido, Simon tiene una función útil única: se puede usar como una pantalla que se puede "poner" en el aire. A continuación, Simon mismo mantendrá la posición y la dirección de la pantalla (y la cámara) en el astronauta. No necesita aseo.La pregunta es, ¿valió la pena enviar un objeto pesado y voluminoso para esto, y no un pequeño avión no tripulado compacto al que simplemente pudieras conectar una tableta?2.5 El principal problema de los drones en la ISS Losdrones simplemente no son necesarios en la ISS, no hay ningún problema para ellos.Más precisamente, se podrían encontrar tareas para ellos, pero para resolver estos problemas, los drones no deberían ser un juguete del tipo "estamos llenando todo de moda, pero es bueno para algo", sino encarcelados para una función específica.3. Hermosos drones del futuroDe las tareas reales para las cuales los drones podrían ser útiles en principio en la EEI, ahora hay dos:1. Dispara al trabajo de los astronautas,2. Salva a las personas de la preparación del espacio.Si buscas una soluciónespecíficamente para estas tareas en este momento: debe usar algo que pueda funcionar en este momento y que funcione de manera eficiente, resolviendo por completo los objetivos establecidos. Y no haga algo arrastrado, justificado por el hecho de que "estamos desarrollando enfoques tecnológicos para que algún día en el futuro ..."3.1. Ofertas racionalesAhora y en el futuro cercano, los drones en la EEI no deberían:- confiar seriamente en los comienzos de la IA (porque son demasiado inicios);- utilice el reconocimiento de señal de video para la navegación (no depurado hasta el final, y redundante en un entorno cerrado donde todo está controlado);- cargar el diseño con análogos inútiles de dispositivos especializados ya disponibles en la ISS con la mejor calidad (sin cámaras integradas, sin tabletas integradas, sin procesadores más allá de los controladores mínimos de dispositivos).El dron solo debe ser la herramienta de trabajo real: una unidad gyrodyn, ventiladores, batería, conexión inalámbrica, y eso es todo. (El máximo sigue siendo algunas de las cámaras más pequeñas de un tipo de teléfono inteligente, y solo para que su transmisión de video se transfiera a través de la imagen a la unidad de procesador en el bastidor, el procesamiento solo está allí). Además, todos los detalles son lo más pequeños posible. Si los drones anteriores tenían las dimensiones de una espada de baloncesto, balonmano y una pequeña de playa, entonces el dron ISS ideal debería ser mucho más pequeño, luchar por el tamaño de una pelota de tenis.Eso es:Las capacidades del procesador se transfieren a uno de los bastidores científicos para que el dron no cargue esta enorme carga adicional (¡no olvide que además del módulo computacional en sí mismo, el dron también se ve obligado a transportar energía para este módulo!).Para la navegación, use el esquema de Esfera original, pero en forma invertida : el dron mismo emite señales como dos balizas (desde el lado de estribor y babor), estas señales son leídas por detectores fijos en las esquinas de los módulos de la estación y triangulados por demora; junto con los datos internos del dron (sensores de aceleración, el funcionamiento de motores eléctricos y anillos girodinámicos), esto es suficiente para determinar tanto la posición del dron como su orientación, y sus derivados.Al trazar la ruta, se utiliza un modelo del entorno listo para usar (el ISS es un objeto grande, pero bastante visible), marcado con bolígrafos y actualizado por el operador si es necesario, sin reproducir el reconocimiento de patrones de la señal de video. Para controlar el entorno, se usa una imagen con la cámara conectada (no en el dron) en el módulo donde está ahora el dron, y este control lo lleva a cabo el operador. Si se utilizan algoritmos neuronales, es solo para resolver tareas auxiliares de bajo nivel para las que ya son lo suficientemente buenas.El propio dron procesa la información al mínimo. Solo descarga sus datos internos a la computadora en el bastidor y recibe instrucciones específicas para el funcionamiento del equipo.Hay puntos de montaje en el dron. Heterogéneo Estos son pestillos operados eléctricamente (la parte complementaria del pestillo está unida al objeto que el dron debería usar), y solo un trozo de velcro mamá que es estándar para la estación (en gravedad cero, esto es suficiente para conectar el dron incluso con un objeto bastante masivo). En cualquier caso, este debe ser un montaje mínimo, mucho más pequeño que los enormes parachoques redundantes de las esferas.Cuando se requiere un video de un astronauta en funcionamiento, se sujeta una cámara de video al dron, una cámara / cámara grande de tiempo completo, que se encuentra en la EEI. El dron lo remolca lentamente y lo gira cuando el MCC necesita cambiar el ángulo de observación del lugar de trabajo del cosmonauta. La maniobra necesaria se calcula en el suelo / en la computadora de montaje en bastidor, el dron solo recibe órdenes elementales para los motores.De modo que para el astronauta sería realmente un alivio, y no un dolor de cabeza innecesario, en el estante científico donde se asigna espacio para la unidad de procesador del dron, también se debe asignar espacio para su muelle, de modo que el estacionamiento y la recarga, como se ha hecho durante mucho tiempo en las aspiradoras. Y es mejor que el dron no esté solo, sino que tenga la capacidad de funcionar como un carrusel: desde el punto de vista del astronauta, el dron parece siempre cargado, solo ocasionalmente aparece una copia al lado del dron en funcionamiento, el elemento remolcado se transfiere (automáticamente) entre ellos, después de lo cual el dron gastado se retira para recargarlo .Además de trabajar como camarógrafo, un diseño similar permitirá utilizar el dron para combatir el aseo.Al igual que una cámara, un dron puede mantener la posición y orientación de un teléfono inteligente / tableta conectado a él; arrastre esta pantalla detrás del host; compensa el retroceso cuando el astronauta toca la pantalla de la tableta sin sostenerlo con otro amigo. O, durante los trabajos de reparación, "mantenga" una bolsa de trabajo / pequeña "mesa" en el aire, con velcro e imanes para artículos pequeños y sujetadores, al lado del astronauta como lo considere conveniente, eliminando la necesidad de enderezar la bolsa enredada cada vez, o quitar lo necesario con un mosquetón en el cinturón, y luego abróchelo allí, etc.Es decir, debería ser una restricción universal en el aire para otras cosas. No es portador de algunos "instrumentos científicos" abstractos, sino de aquellos objetos que se usan real y constantemente en la estación en la vida cotidiana.Y con el desarrollo adicional de este enfoque:es mejor imaginar ni siquiera un par de drones trabajando en turnos con una cosa cerca de uno de los astronautas, sino un enjambre de ellos en la estación trabajando como un carrusel. Varias instancias se encuentran constantemente en cada módulo de la estación, listas para actuar sin procedimientos especiales de inicialización. En el fondo, comienzan a empujar, de modo que se congelarían y no girarían, objetos al lado del astronauta, si estos objetos se liberan de las manos, pero no están pegados a la pared con Velcro / no están fijos, y la atención de la persona se distribuye claramente entre varios de estos objetos.3.2. ¿Qué sigue? ¿En realidad?El orden en que aparecieron los drones en la EEI en miniatura refleja el nivel de desarrollo tecnológico de los países. El líder hace algo, luego se atrae a los otros que pueden competir: primero los EE. UU., Luego, por un amplio margen, Japón, Alemania ...Está claro que no se debe esperar a Rusia incluso en esta carrera en miniatura.¿Entonces resulta que ahora es el turno de los Estados Unidos nuevamente? Teniendo en cuenta su experiencia, mirando los esfuerzos de los socios, ¿debería la NASA ahora llevar esta carrera a una nueva etapa tecnológica?Aparentemente, algo realmente está planeado allí lentamente. Al menos la NASA está llevando a cabo una especie de lluvia de ideas, anunciando competencias públicas en varios hackathons.Desafortunadamente, las soluciones ofrecidas en tales concursos están arruinadas por estereotipos erróneos sobre las condiciones, problemas y tareas de la EEI. Los conceptos se hacen con diligencia, pero sin pensar, sobre el principio de "ceguemos todo lo que podamos en un avión no tripulado y de repente será útil para algo". Aquí hay un ejemplo típico .