Es imposible imaginar el mundo de ciencia ficción del futuro sin robots. Ya sean androides del universo Alien, máquinas robot antropomórficas de Transformers, un perro robótico llamado Axel o un enorme robot asesino ED-209 en la película Robocop, que para muchos espectadores parecía un pollo. ¿Pero qué tienen en común? Además de la fuerza, la velocidad, la resistencia y otras características físicas, por así decirlo. Inteligencia ¿Y qué es la inteligencia? La capacidad de pensar, analizar datos y tomar decisiones, si hablamos exageradamente en pocas palabras. Hoy nos familiarizaremos con el primer robot modular del mundo, que puede analizar la situación en el campo, reconstruyéndose para lograr la tarea. ¿Cómo lograron los científicos enseñarle al robot a pensar rápidamente y tomar las decisiones correctas, cómo funciona este robot y qué tan bien? El grupo de investigación describe todo esto en su informe, en el que nos sumergiremos. Vamos
Base de la fundaciónPara comenzar, vale la pena hablar un poco sobre cómo se ve el robot probado. No es del todo normal, sus características de diseño se revelan en el nombre mismo: un robot modular autoconfigurable (MSRR). La palabra "robot" es clara para todos nosotros. Veamos qué significan los dos primeros. Modular: este robot consta de módulos, que son esencialmente robots independientes. Al combinar estos módulos, puede obtener un diseño de cualquier complejidad (prácticamente), dependiendo de la tarea requerida. Es decir, los mini robots individuales (módulos) pueden realizar fácilmente algunas tareas por su cuenta, y para tareas más complejas se unen, como los poderosos exploradores combinados en Megazord (los niños de los años 90 entenderán qué tipo de tonterías acabo de escribir :) )
 La aparición de un robot modular.
La aparición de un robot modular.Los investigadores señalan que previamente se han realizado estudios en el campo de los robots modulares que pueden resolver algunos problemas. Sin embargo, anteriormente tales robots podían resolver tareas simples o tareas complejas, cuyas soluciones ya habían sido programadas por humanos. De hecho, no tomaron decisiones por su cuenta, evaluando la situación y la complejidad necesaria para completar la tarea.
Los científicos realizaron una serie de pruebas, cada una de las cuales era diferente de la anterior. El robot, por otro lado, tuvo que realizar una tarea específica (cuál un poco más tarde) mediante la reconstrucción en el nuevo entorno. Un abrigo de piel de oveja doble, por supuesto, nadie le pidió que lo hiciera, pero los resultados todavía sorprendieron a los científicos. Y ahora nos familiarizaremos con ellos.
Prueba "Megazord"Las pruebas del robot se realizaron en tres etapas, cada una de las cuales tenía su propia tarea. Las pruebas se realizaron en una sala donde se formó el "entorno de trabajo" del robot con la ayuda de cajas, que los investigadores cambiaron en cada etapa. Imagine un laberinto que cambia cada vez que ingresa. El robot no estaba originalmente programado para cada nuevo entorno, para él era un entorno completamente nuevo. Lo único que el robot sabía con certeza eran sus habilidades. En primer lugar, se trata de una evaluación del entorno, luego el robot seleccionó de la biblioteca de sus capacidades las que más efectivamente contribuyen a la tarea.
Como dije antes, solo había tres fases de prueba con diferentes tareas y entornos:
- Explore el entorno, encuentre todos los objetos rosa / verde y la marca azul, mueva los objetos al punto de reinicio;
- Explore el entorno, encuentre el buzón, coloque el tablero en la caja;
- Explore el entorno, encuentre el paquete, póngale un sello.
Las tareas parecen bastante simples, pero esto es para nosotros. Entramos en la habitación, miramos a nuestro alrededor, encontramos todo lo que necesitábamos y listo. Pero no compare una de las computadoras más complejas del mundo (nuestro cerebro) y un pequeño robot.
En la primera etapa, el robot tenía la tarea de tomar 2 objetos: "basura de metal", marcada en rosa y verde, y llevarla al punto de descarga para "reciclarla". El punto de reinicio se marcó con un cuadrado azul en la pared.
La tarea está establecida, el entorno de trabajo está listo, el robot está funcionando. Lo primero que hace es escanear el espacio y crear un mapa tridimensional, según el cual será guiado en el futuro.
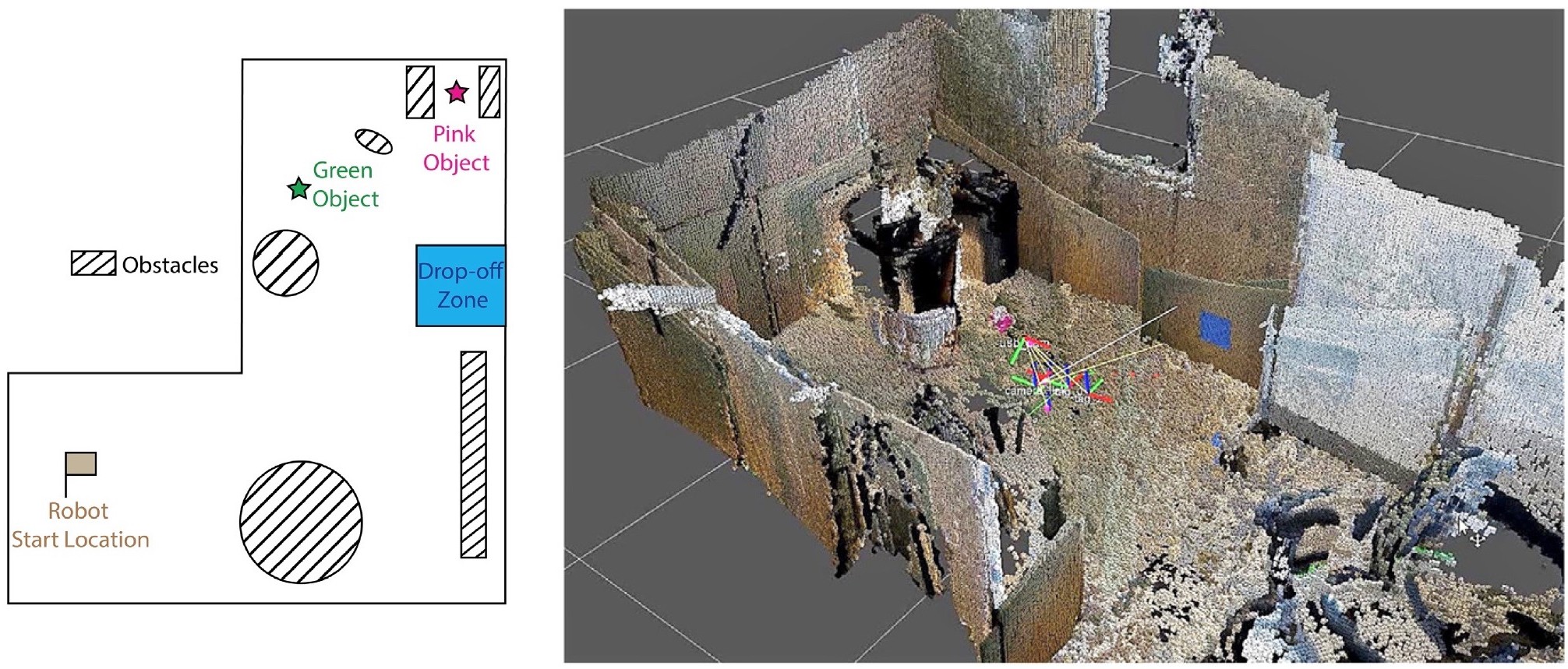 El esquema de la zona de prueba de la primera etapa (izquierda) y un mapa tridimensional del entorno de trabajo del robot modular (derecha).
El esquema de la zona de prueba de la primera etapa (izquierda) y un mapa tridimensional del entorno de trabajo del robot modular (derecha).Considere las acciones del robot como un ejemplo de la primera etapa de prueba, cuyos detalles se ven en el diagrama y la imagen de arriba.
La marca verde en el diagrama es la ubicación de una lata de refresco regular, cuyo acceso no está restringido. La marca rosada es una bobina de alambre que se encuentra en un espacio estrecho entre dos contenedores de basura. Además, se ubicaron varios obstáculos en toda el área.
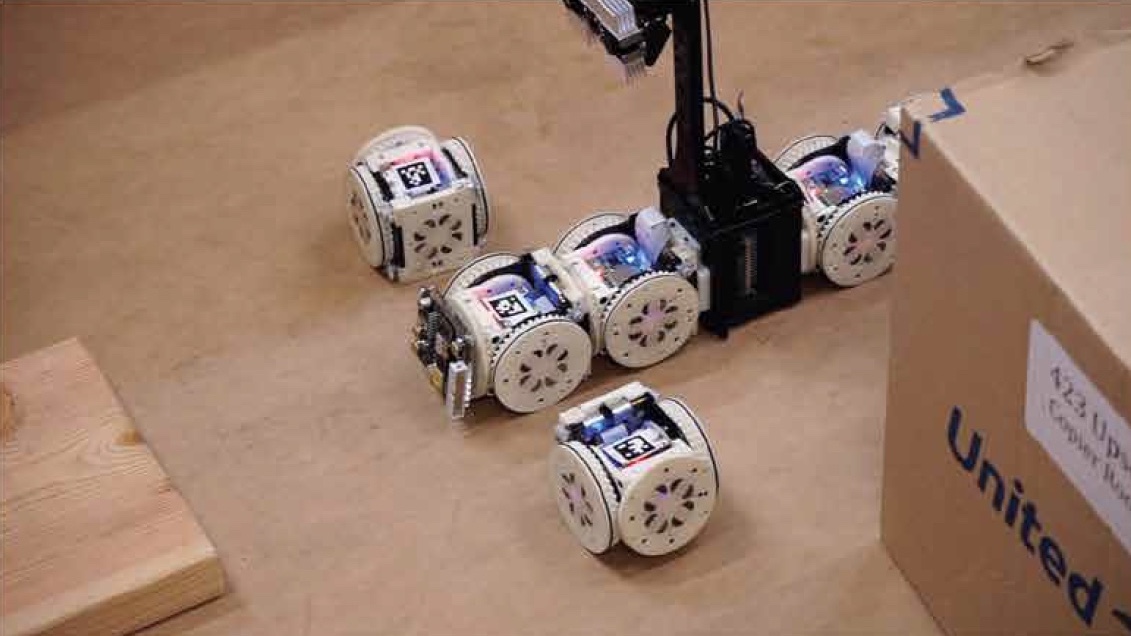
Primero, el robot eligió la forma más adecuada para el movimiento: el "automóvil". Después de descubrir un objeto rosado, el robot analizó su posición y concluyó que tal forma no le daría la oportunidad de obtener el objeto. Por lo tanto, fue reconstruido en forma de "tronco" y sacó un objeto. Volviendo a la forma de la máquina, el robot tomó el objeto y lo llevó al punto de descarga, cuya posición ya conoce gracias a escanear y crear un mapa.
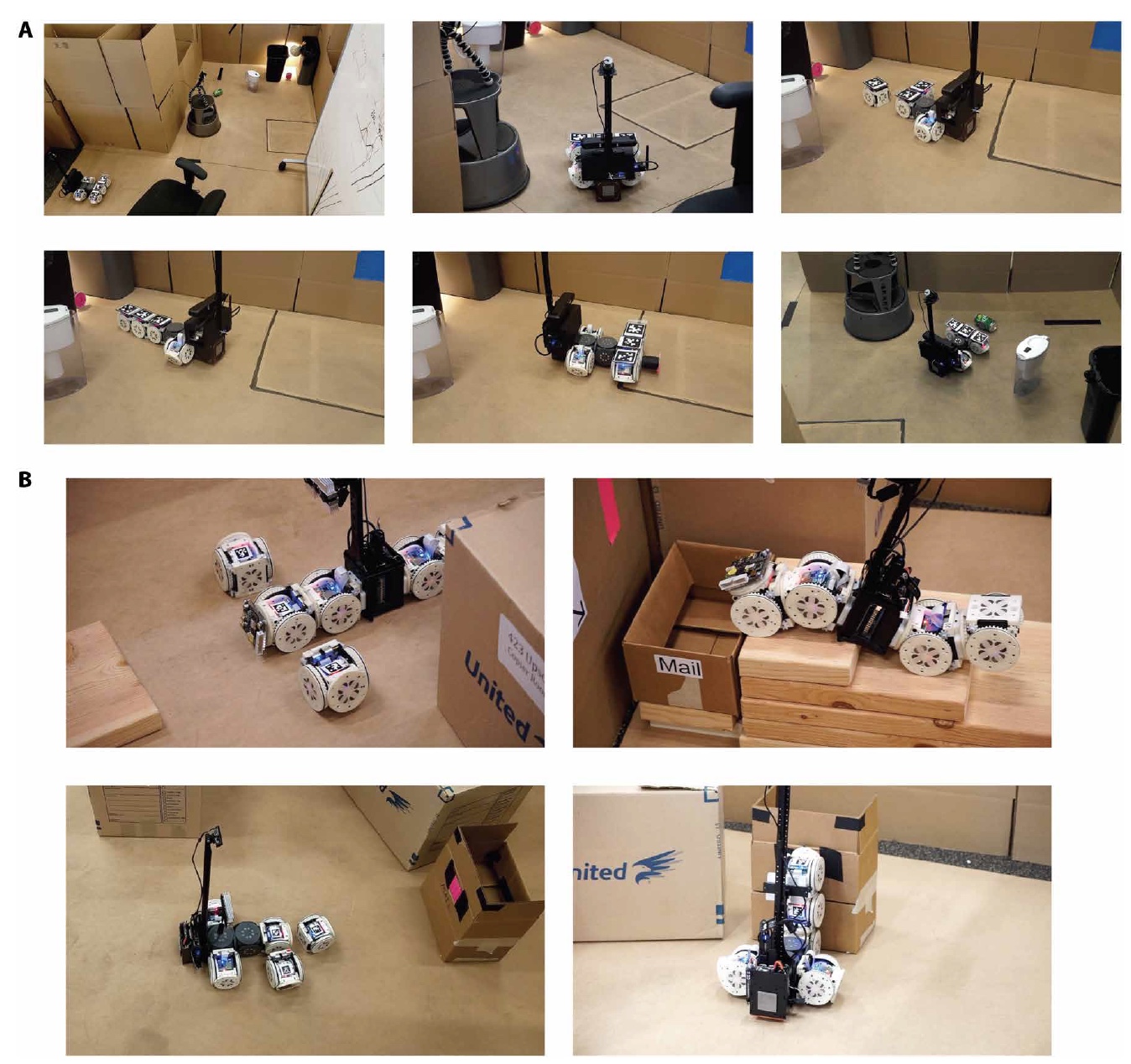 A - la primera etapa (de izquierda a derecha: vista del entorno de trabajo, escaneo del entorno, reconfiguración del robot, captura de un objeto rosa, movimiento de un objeto, captura de un objeto verde); B - la segunda etapa (2 imágenes superiores) y la tercera etapa (2 imágenes inferiores).
A - la primera etapa (de izquierda a derecha: vista del entorno de trabajo, escaneo del entorno, reconfiguración del robot, captura de un objeto rosa, movimiento de un objeto, captura de un objeto verde); B - la segunda etapa (2 imágenes superiores) y la tercera etapa (2 imágenes inferiores).En la segunda etapa, el entorno ya era diferente, porque las tácticas anteriores del robot ya no serían efectivas. En las imágenes de arriba, vemos que el robot se puso en forma de "serpiente" para subir las escaleras y dejar el objeto en el buzón. Es decir, el robot, al evaluar la situación, se dio cuenta de que la presencia de ciertos módulos no solo sería superflua, sino que también podría conducir a una falla, por lo tanto, los desconectó.
En la tercera etapa, el robot tuvo problemas para encontrar el objetivo (marque dónde debería colocar el sello postal), pero después de un par de minutos pudo detectarlo. La marca se encuentra a una altura de 25 cm del piso, porque la configuración inicial del robot ("máquina") no es efectiva. El robot fue reconstruido en una configuración vertical y pegó un sello.
Puzzle Robot RecipeComo ya entendimos, nuestro Megazord consta de varios pequeños módulos de robot capaces de realizar varios movimientos por sí mismos, lo que le da al gran robot la ventaja de la movilidad y, por supuesto, la capacidad de reconfigurar.
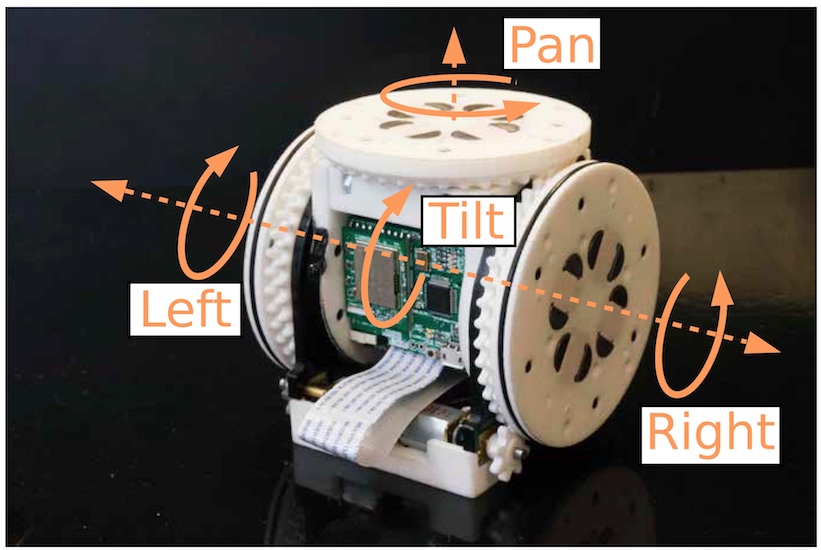 La apariencia del módulo. Las flechas muestran cómo el módulo puede cambiar de posición (giros e inclinaciones horizontales y verticales).
La apariencia del módulo. Las flechas muestran cómo el módulo puede cambiar de posición (giros e inclinaciones horizontales y verticales).Cada módulo (cada cara del cubo es de 80 mm) está equipado con imanes electropermanentes que permiten que los módulos se conecten entre sí independientemente del lado de la conexión. Además, este imán le permite unir objetos ferromagnéticos (por ejemplo, para llevarlos al punto de descarga o despejar el camino para el robot). Cada módulo individual también está equipado con su propia batería (aproximadamente 1 hora), un microcontrolador y un chip Wi-Fi. Todos los módulos fueron controlados de forma inalámbrica por una computadora central, y se usó un enrutador doméstico común para proporcionar un entorno de Wi-Fi.
 Apariencia de la parte principal del robot (cámara, soporte, cámara RGB-D y base).
Apariencia de la parte principal del robot (cámara, soporte, cámara RGB-D y base).La base de la base del robot es una pequeña caja (90x70x70 mm) hecha de placas metálicas delgadas, que permite que los módulos se unan a la base a través del magnetismo. Los procesos informáticos se realizaron con un procesador Intel Atom 1.92 GHz, 4 GB de RAM y 64 GB de almacenamiento. Además, se montó un adaptador USB Wi-Fi en la base.
El paso más importante en la implementación de la tarea es su comprensión. Esta regla se aplica tanto a humanos como a robots pequeños e inteligentes. Para entender qué y cómo hacer, el robot escanea el entorno. Esto se hace a través de una cámara RGB-D.
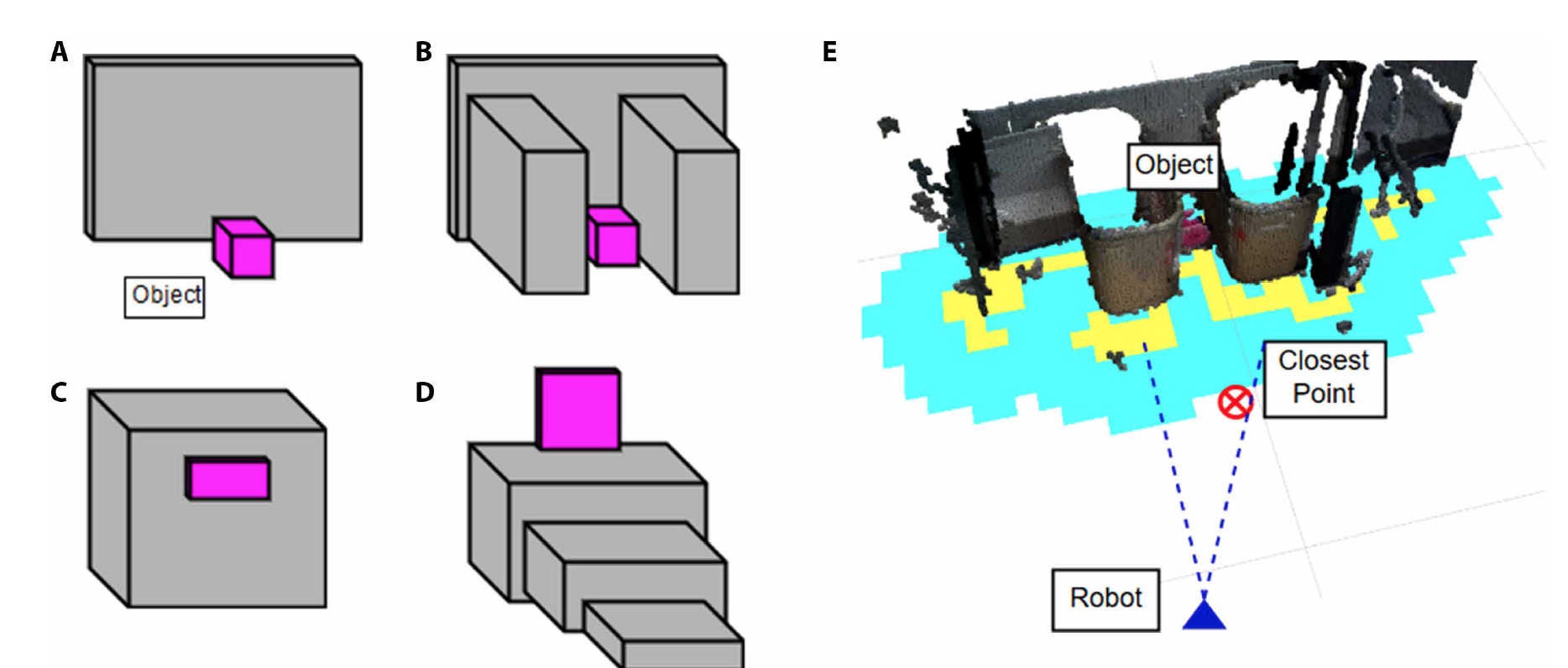 La posición de los objetos de interés ( A , B es la primera etapa, C es la segunda y D es la tercera), así como un ejemplo de cómo el robot "ve" durante la prueba con un objeto dentro de una abertura estrecha ( E ).
La posición de los objetos de interés ( A , B es la primera etapa, C es la segunda y D es la tercera), así como un ejemplo de cómo el robot "ve" durante la prueba con un objeto dentro de una abertura estrecha ( E ).Cuando el sistema de escaneo reconoce el objeto necesario, se activa la función de caracterizar la información obtenida de un mapa tridimensional del entorno. De esta forma, se forma una cuadrícula de espacio, en la que las áreas inaccesibles para el robot se marcan en amarillo. A continuación, el sistema encuentra el punto de acceso más cercano al objeto (en un ángulo de 20 ° desde el propio robot). Si la distancia desde este punto al objeto es mayor que el valor límite, y el objeto está ubicado en el piso, el sistema determina que el objeto está ubicado en la abertura. Si el sistema define el objeto en una posición sobre el piso, lo evalúa como pasos. Si el valor de la distancia desde el punto al objeto es menor que el indicador de límite, el sistema decide usar la configuración "libre" (es decir, la original) o "alta" (para elevar a cierta altura).
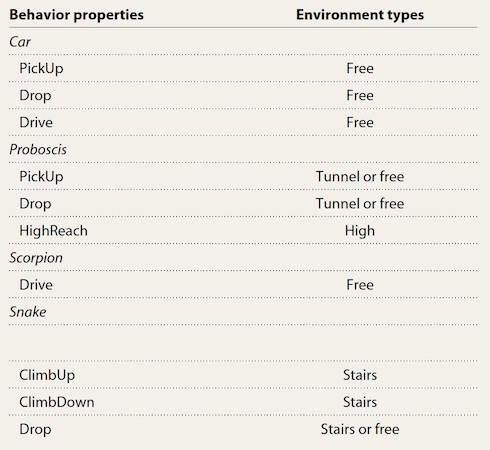 Tabla de configuraciones de robot y para qué se utilizan.
Tabla de configuraciones de robot y para qué se utilizan.La especificación de la tarea del robot es bastante simple. Considere un ejemplo con un buzón:
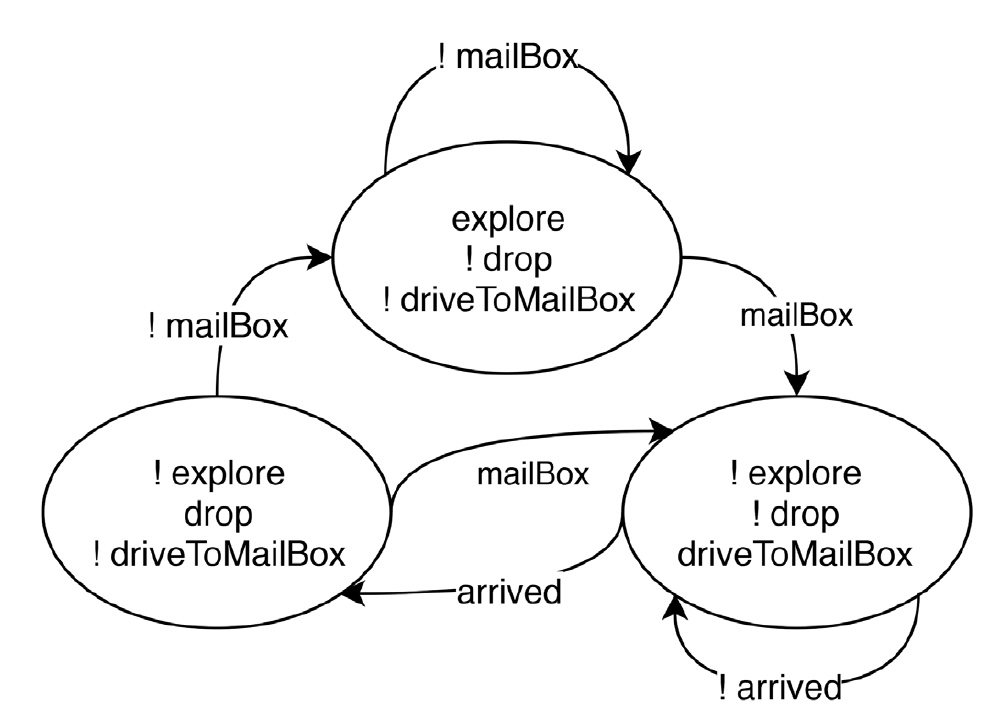
- realizar "investigación" si y solo si el robot no ve el buzón;
- realice "movimiento hacia la caja" si y solo si el robot ve la caja y aún no la ha alcanzado;
- realice un "reinicio" (de un objeto en una caja) si y solo si el robot ve la caja y llega a ella.
Esquemáticamente, esto se puede representar de la siguiente manera (las acciones marcadas con un valor de "verdadero" y "falso" se marcan con un "!", Dependiendo de la variante):
El proceso de cambiar la configuración comienza con el hecho de que el sistema determina la necesidad de este proceso. Si hay una, una cámara que mira hacia abajo detecta una sección de 0.75 m por 0.5 m, donde el proceso de reconfiguración puede ser exitoso y sin interferencia de algunos objetos. El controlador determina las configuraciones iniciales y finales, después de lo cual transmite una señal a los módulos que tienen la etiqueta AprilTag (parece un código QR). Los módulos reciben un comando para desconectarse, moverse a la posición deseada y conectarse en una nueva configuración.
Este video muestra todo el proceso de prueba del robot, desde escanear el medio hasta completar la tarea.El elemento más curioso de este robot transformador aún no es la capacidad de cambiar la configuración de los módulos, sino la capacidad de decidir independientemente cómo cambiarlo, adaptándose a las circunstancias.
La arquitectura del sistema utiliza un marco que permite a cualquier usuario, utilizando el vocabulario más común, establecer una tarea para el robot y formar un controlador central, que a su vez controlará los módulos según el entorno de ejecución de la tarea. La base de todo esto es LTLMoP (Planificación de Misiones de Lógica Temporal Lineal), que le permite crear controladores basados en instrucciones de alto nivel proporcionadas por el usuario.
Para un conocimiento más detallado del estudio, recomiendo el
informe de los investigadores y
materiales adicionales .
EpílogoEste sistema es muy interesante, aunque no sin inconvenientes. Entonces, por ejemplo, el usuario le indica al robot que coloque el objeto en el buzón, pero que no lo suelte hasta que se detecte el buzón. En otras palabras, el robot no puede simplemente tomarlo con las palabras "¡A la mierda, lo dejo!" interrumpir la tarea. Al mismo tiempo, si el robot no logra detectar la caja, el sistema le pedirá al usuario que ingrese datos de aclaración. Resulta que el robot no es tan independiente? No, por supuesto, este no es el T-1000, pero los primeros pasos para esto ya están allí. Después de todo, el robot mismo decide cuál de las configuraciones disponibles es adecuada para la tarea de la mejor manera. Es imposible llamar a esto un proceso de pensamiento, aquí todo es bastante simple y lineal.
Sin embargo, incluso si este pequeño transformador requiere la ayuda de una persona, aún puede tomar una decisión. Esperemos que actualmente no estemos observando la formación del futuro Ultron. :)
Viernes fuera del tema (todos tienen un buen fin de semana):
Video para aquellos que no pueden decidir a quién le gusta más: un samurai genial o robots geniales.
Y el segundo tema (lo siento, no pude resistir) para los amantes de la música.
Gracias por quedarte con nosotros. ¿Te gustan nuestros artículos? ¿Quieres ver más materiales interesantes?
Apóyenos haciendo un pedido o recomendándolo a sus amigos, un
descuento del 30% para los usuarios de Habr en un análogo único de servidores de nivel de entrada que inventamos para usted: toda la verdad sobre VPS (KVM) E5-2650 v4 (6 núcleos) 10GB DDR4 240GB SSD 1Gbps de $ 20 o cómo dividir el servidor? (las opciones están disponibles con RAID1 y RAID10, hasta 24 núcleos y hasta 40GB DDR4).
VPS (KVM) E5-2650 v4 (6 núcleos) 10GB DDR4 240GB SSD 1Gbps hasta diciembre de forma gratuita al pagar por un período de seis meses, puede ordenar
aquí .
Dell R730xd 2 veces más barato? Solo tenemos
2 x Intel Dodeca-Core Xeon E5-2650v4 128GB DDR4 6x480GB SSD 1Gbps 100 TV desde $ 249 en los Países Bajos y los EE. UU. Lea sobre
Cómo construir un edificio de infraestructura. clase utilizando servidores Dell R730xd E5-2650 v4 que cuestan 9,000 euros por un centavo?