Saludos de nuevo!
Como mi ensayo corto anterior fue generalmente percibido positivamente, quiero compartir algunos de los conocimientos sobre las bicicletas eléctricas acumuladas durante los foros de lectura.

En este artículo quiero compartir qué tipos de unidades se utilizan en la bicicleta eléctrica, sus ventajas, desventajas y características.
Espero que esto le parezca interesante a alguien. Solo revisaré motores de corriente continua trifásicos, porque no he examinado el resto, y estos otros son relativamente raros
hoy en día
Entonces, comencemos:
En general, los elementos de conducción de las bicicletas eléctricas se pueden clasificar en 3 tipos:
- Motor eléctrico de carro, motor eléctrico ubicado en el centro.
- Rueda de motorreductor (motor de cubo de engranaje).
- Rueda de motor con accionamiento directo (accionamiento directo).
Comencemos con el
número uno: mid-drive, central .
Por cierto, es bastante popular en todo tipo de bicicletas eléctricas europeas de marca.
Se encuentra cerca del carro (pedales) de la bicicleta, a través de una transmisión por cadena y un mecanismo de engranaje,
Si hay uno en una bicicleta, gira la rueda trasera.


Pros: si una bicicleta con engranajes, una amplia gama de uso óptimo debido a estos engranajes, puede obtener una buena tracción a bajas velocidades y alta velocidad.
Contras: la cadena y las estrellas se convierten en consumibles, si rompes la cadena en el camino, o doblas la polla, o de alguna manera rompes la cadena, volverás a casa a pie empujando tu transporte.
También es imposible la tracción total con un solo motor.
Número dos: caja de cambios, engranadaEl motor eléctrico se encuentra dentro del cubo de la rueda, también hay un engranaje planetario de reducción de engranajes, que permite que el motor eléctrico gire a velocidades más altas que la llanta.
Los engranajes generalmente están hechos de plástico.
Hay un mecanismo que transmite el momento en el sistema de motor de rueda en una sola dirección, con tracción del motor (rueda libre, rueda libre).
En el caso de que la transmisión vaya en la dirección opuesta, el sistema se desconecta, por lo tanto, durante el enrollamiento o el movimiento de los pedales, el motor eléctrico no gira y, por lo tanto, no complica la rotación de la rueda.
Aquí a la izquierda - transmisión directa, a la derecha - caja de cambios:

motorreductor:


Pros: Mejor eficiencia en una amplia gama de velocidades en relación con la conducción directa, mejor tracción a bajas velocidades y arranque, menor consumo de energía por kilómetro, menor tamaño y peso, falta de resistencia al movimiento al conducir desde pedales.
Contras: la falta de la capacidad de usar la recuperación, un punto débil en forma de engranajes de plástico, al cortar cualquier diente, o daños en el embrague de sobrerrevolucionado en el camino, tienes que pedalear.
Número tres: accionamiento directoEl sistema más confiable, al minimizar las partes innecesarias, es un motor eléctrico limpio, el rotor se asienta sobre el eje y es estacionario en relación con la horquilla, el estator gira con la rueda.




Pros: un mínimo de piezas innecesarias, es posible la recuperación, fácil logro de altas velocidades.
Contras: diámetro y peso relativamente grandes, baja eficiencia a bajas velocidades.
Ahora sobre cuestiones generales relacionadas, principalmente con las ruedas del motor, porque middrive no me interesa, por lo que no estaba muy interesado en él.
Por lo tanto, en general, una rueda de motorreductor es más de alto par y más económica.
La conducción directa es más rápida, por lo que si desea conducir a velocidades de 40 - 50+, entonces debería considerar las unidades directas.
El accionamiento directo también puede usar el controlador para implementar un modo de recuperación, transfiriendo el motor eléctrico al modo generador y almacenando la energía generada nuevamente en la batería.
El efecto de recargar la batería con recuperación es bastante pequeño: un aumento de orden de magnitud de 2-3 por ciento de millaje, además de que también hay matices en forma de altas corrientes de carga, y el hecho de que cargar una batería de litio a temperaturas inferiores a +5 Celsius es matarla (se aplica a los teléfonos móviles y otros dispositivos domésticos en un ion de litio y un polímero de litio, por cierto), pero se puede usar como freno y, por lo tanto, ahorrar pastillas de freno.
Por cierto, en el "transporte eléctrico grande", en forma, por ejemplo, de trenes eléctricos ER2T, el frenado regenerativo se usa exactamente: hasta una velocidad de aproximadamente 25 km / h, el tren se desacelera simplemente introduciendo motores eléctricos de tracción en modo generador, transfiriendo la electricidad generada de nuevo a la red de contacto.
Para una conducción económica, es mucho más útil usar el mínimo de frenado y el máximo, en la costa, es decir, al ver el semáforo rojo, por ejemplo, no vaya directamente a él en el gas, y cierre el gas durante 300 metros, y en la costa para moverse a la llegada al semáforo no más de 10-15 km / h.
Qué más: velocidad de conducción.
Una de las preguntas más comunes para los principiantes es ¿qué tan rápido viajará mi bicicleta en una unidad eléctrica?
Depende de cuatro cosas:
1. La velocidad de ralentí de la rueda del motor a la tensión nominal:
Una venta normal los indica, o pueden ser eliminados.
La rueda de mi motor, por ejemplo, tiene 310 RPM a 48V. Cuando se mide con un tacómetro chino,
Resultó 305 revoluciones por minuto cuando funciona con 4 baterías de plomo conectadas en serie de 12 voltios (aproximadamente 50 voltios en realidad) en una rueda suspendida, aceptable.
No olvide que esta es la velocidad de la rueda del motor sin carga, ¡es importante!
2. El diámetro de la llanta. Está claro que cuanto mayor es la circunferencia de la rueda, mayor es la velocidad real a velocidades iguales.
Fórmula para el cálculo: circunferencia de la rueda en milímetros / 1000 * (revoluciones de la rueda del motor / 60) = velocidad en metros por segundo. Para kilómetros por hora, multiplique por 3.6, para obtener la velocidad final pronosticada; todo esto aún dividido por 1.2, porque la velocidad bajo, incluso con una carga bastante factible, será menor que sin carga (aproximadamente 20 por ciento, sí).
3. Correspondencia del poder a la resistencia al movimiento.
Si tiene una velocidad de diseño de 50 mph, para lograr y mantener dicha velocidad, el motor tendrá que desarrollar una potencia del orden de kilovatios, o 1000 vatios.
Si su motor desarrollará una potencia de 500 vatios, entonces, debido a la resistencia a la rotación, no podrá alcanzar su velocidad máxima, está claro, y estará satisfecho con una velocidad máxima de 37 km / h en lugar de 50, mientras que el motor todavía estará bastante caliente debido a una sobrecarga, si a esta velocidad, conducirás el acelerador hasta el final.
4. Tensión de alimentación.
Al comprar una rueda de motor, se le indica el voltaje de suministro nominal, por ejemplo, 48 voltios.
Pero nadie alimenta directamente tales motores: son controlados por un controlador que recibe un voltaje constante monofásico de la batería y lo convierte en un "rotativo" trifásico para alimentar la rueda del motor.
Por lo tanto, no es necesario alimentar la rueda del motor con el controlador y la batería para el voltaje especificado.
Puede alimentar un motor de 48 voltios con una batería y un controlador de 36 voltios.
24 o 60 voltios, mientras que la velocidad de rotación de la rueda del motor a aceleración máxima será de 0,75, 0,5 o 1,25 del valor nominal, respectivamente.
Es decir, puede controlar la velocidad máxima dentro de ciertos límites simplemente cambiando el voltaje de la batería y el controlador.
Hay controladores de doble voltaje, por ejemplo, 36/48 voltios o 48/60 voltios.
Además, un parámetro importante de los controladores en relación con el motor eléctrico es su amperaje, a través del cual se puede establecer la potencia máxima alcanzada por el motor que alimenta, por ejemplo, 36v 17A = ~ 612 vatios, 60V 25A = ~ 1500w
El hecho es que la "potencia en vatios" indicada en la rueda del motor es más bien la recomendada a largo plazo, en la que no se sobrecalienta, y en la que se garantiza su larga y feliz vida.
Y, por lo tanto, con un motor de 250 vatios, puede aplicar 500 y 800 vatios, o incluso kilovatios, por supuesto, a largo plazo, los engranajes de plástico o las ruedas libres pueden no gustarle, pero se cree que la mayoría de las unidades de tres ruedas y dos veces aumenta relativamente bien.
Sin embargo, los controladores merecen un artículo separado, por lo que no entraremos en esta jungla ahora.
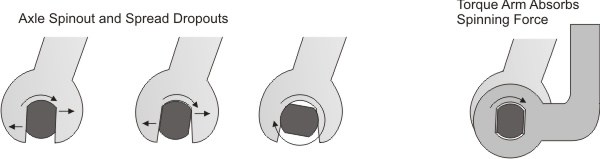
Lo que es más importante: amplificadores de deserciones (brazo de par).
Debido al hecho de que el cuadro de las bicicletas convencionales no está diseñado para resistir la torsión del eje de la rueda, especialmente en el caso de una horquilla / cuadro de aluminio, se recomienda tomar medidas contra el giro del eje de la rueda del motor.
El hecho es que según algo allí, cualquier acción da lugar a oposición.
La rueda del motor gira la llanta, descansando sobre el eje, es decir, el eje de la rueda es como un punto de apoyo, que ella está tratando de girar en la otra dirección.
Si las ranuras de la horquilla no pueden sostenerse en este momento, se rompen, como resultado: la rueda sale por separado, la bicicleta a la velocidad con las plumas de la horquilla se pega al asfalto. A lo que esto conduce, espero que no haya necesidad de explicarlo, las fracturas óseas e incluso la morgue como resultado, son bastante probables.


¡Buena suerte con la electrificación, amigos!
PD: algo que mis ojos aquí son desagradables: por primera vez, él mismo, en el panorama general, notó ...
pero en general soy blanco y esponjoso, si no tienes que ir a trabajar temprano en la mañana ...: D
