
El modelo actualizado de la cámara RealSense 435, que recibió el índice i, vio la luz. Su característica distintiva es el sensor inercial incorporado IMU (Unidad de medición inercial). ¿El nombre Intel RealSense no te dice nada? Entonces esta publicación es para ti. El desarrollo de esta tecnología se describe con tanto detalle en el blog de la compañía que puede contar su historia sin ir más allá del Habra. Eso es lo que probablemente haremos, porque recientemente RealSense no dice lo que se escucha, aunque esto es injusto.
 Cámara creativa compatible con Intel Perceptual Computing SDK. Año 2013
Cámara creativa compatible con Intel Perceptual Computing SDK. Año 2013Las tecnologías de imágenes en 3D se han desarrollado en Intel desde principios de la década de 2000. El nombre RealSense
apareció en 2014 , reemplazando la
Computación Perceptiva utilizada anteriormente; Luego
vino el SDK Intel RealSense y una cámara prototipo. El principio de funcionamiento de las cámaras 3D consiste en la formación simultánea de dos tipos de imágenes: un marco RGB ordinario y un mapa de profundidad obtenido mediante emisores y sensores infrarrojos. Se puede usar una imagen enriquecida con datos de profundidad para manipular y analizar objetos representados (por ejemplo, segmentar el fondo o mover el punto de enfoque), así como una interfaz natural para controlar sistemas informáticos humanos utilizando expresiones faciales, movimientos de manos y dedos, gestos.
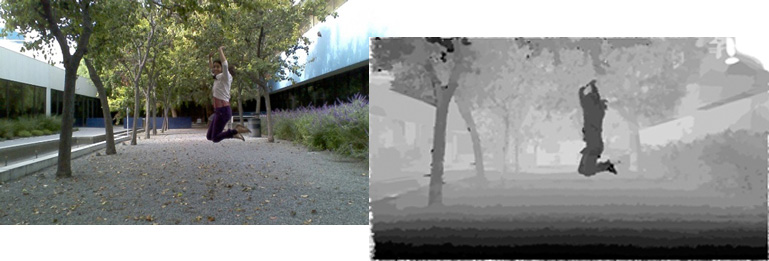 Foto RGB y mapa de profundidad para él
Foto RGB y mapa de profundidad para élDurante los próximos 2 años, Intel promovió activamente RealSense en todos los frentes. Se llevaron a cabo
concursos regulares de
desarrolladores , surgieron numerosos
materiales de capacitación y referencia . En 2015, se lanzaron dos cámaras serie RealSense: la
F200 delantera y la R200 trasera . En este caso, incluso tuve un examen personal: en las vacaciones de Año Nuevo en 2016, tuve la oportunidad de
probar ambas cámaras en casa . Había planes para implementar RealSense en computadoras portátiles,
teléfonos inteligentes y
otras computadoras , pero posteriormente todo se limitó a cámaras para la PC.
 Cámara Intel RealSense SR300. Año 2016
Cámara Intel RealSense SR300. Año 2016Pasó el tiempo, el software mejoró, salieron nuevas cámaras primero de la
segunda , luego de la
tercera generación. Cada vez que
se introdujeron nuevas mejoras : la precisión de determinar la profundidad aumentó, la facilidad de uso, aparecieron nuevas funciones de reconocimiento. Intel continuó
interactuando con los desarrolladores y recibió comentarios de ellos. En el blog,
publicamos activamente traducciones al ruso de artículos sobre
RealSense SDK ; esta fue una de las pocas fuentes de información sobre RealSense en ruso. Lo cual, de hecho, es cierto hasta el día de hoy.
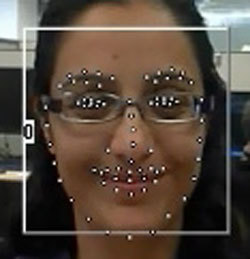 Intel RealSense SDK 1.0 permitió rastrear hasta 76 puntos clave de una cara; en versiones futuras, el número de puntos aumentó
Intel RealSense SDK 1.0 permitió rastrear hasta 76 puntos clave de una cara; en versiones futuras, el número de puntos aumentóActualmente, la familia de cámaras Intel RealSense D400 lanzada a principios de este año es relevante. La familia consta de dos cámaras: D415 y D435. D415 ofrece una imagen más clara, pero tiene una velocidad más baja y una distancia mínima más distante. El D435 es más adecuado para aplicaciones AR / VR porque su obturador global funciona mejor con sujetos que se mueven rápidamente. Las características más detalladas de las cámaras se dan en la tabla.
| D415 | D435 |
|---|
| Solicitud | Interior / exterior |
| Determinación de la profundidad | Haz IR dual |
| Tipo de obturador | Deslizamiento | Global |
| Tamaño de píxel | 1,4 x 1,4 μm | 3 x 3 micras |
| Tamaño del campo de profundidad | 63,4 ° x 40,4 ° | 85,2 ° x 58 ° |
| Resolución de campo de profundidad | 1280 x 720 |
| Opciones de flujo RGB | 1080p @ 30 FPS |
| Rango de profundidad | 0,16 - 10 m | 0,11 - 10 m |
| Tamaño de la cámara (ancho x profundidad x altura) | 99 x 20 x 23 mm | 90 x 25 x 25 mm |
Ahora la cámara D435 se ha modernizado; como ya se mencionó, se le agregó un sensor de movimiento IMU inercial de 6 ejes. A pesar de la pequeñez de los cambios, no pueden considerarse sin importancia de ninguna manera, ya que abren un nuevo campo de aplicación para RealSense. Si antes se suponía que la cámara era un objeto estático, ahora se agregan datos de posición y movimiento a la imagen 3D, valiosos en sí mismos y, además, aumentan la precisión para determinar la profundidad. RealSense se ha vuelto más fácil y más conveniente de usar en objetos en movimiento como drones o robots. Y los dispositivos móviles inteligentes, a su vez, recibieron un "tercer ojo", que le permite implementar una funcionalidad fundamentalmente nueva. Además, IMU funciona con el marco
ROS (Robot Operating System) y, por lo tanto, se puede usar con todas las plataformas de robots compatibles con ROS.
Intel RealSense D435i ahora está en
pre-pedido , los envíos comenzarán el 3 de diciembre, el precio actual es de $ 199.