Las últimas dos semanas han sido difíciles para nuestro equipo. Se lanzó OpenCV 4 , y con él, se prepararon para el kit de herramientas OpenVINO R4 de Intel , que incluye OpenCV. Piensas, estoy distraído por un tiempo, miraré, como siempre, sobre los foros de OpenCV y los comentarios de los usuarios, y aquí está de moda que digas que OpenCV no es IoT, que bajo Raspberry Pi es suficiente para ensamblar, no hay suficiente soldadura para poner make -j2 . por la mañana estará listo si tienes suerte.
Por lo tanto, propongo unir nuestras manos y ver cómo puede ensamblar la biblioteca OpenCV para un sistema operativo de 32 bits que se ejecuta en un procesador ARM utilizando los recursos de una máquina con sistema operativo de 64 bits, impulsado por una excelente arquitectura de CPU. Brujería ¡Compilación cruzada, no de otra manera!
Declaración del problema.
Compilar directamente en el tablero, que comúnmente se llama nativo, es realmente laborioso, por lo que aquí consideraremos una forma de construir un proyecto que permita dispositivos informáticos más fuertes (llamémoslos hosts) para preparar binarios para sus pequeños familiares. Además, ambas máquinas pueden tener diferentes arquitecturas de CPU. Esta es una compilación cruzada.
Entonces, para preparar una tarta de frambuesa rellena con OpenCV, necesitamos:
- Carcasa de acoplador de imagen Ubuntu 16.04
- La máquina host es más potente que la Raspberry Pi (de lo contrario, ¿cuál es el punto, no?)
- Compilador cruzado para ARMhf, así como bibliotecas de la arquitectura correspondiente
Todo el proceso de construcción de OpenCV tendrá lugar en la máquina host. Yo uso Ubuntu en casa. Con otra versión de Linux, los problemas de reproducción no deberían ocurrir. Para los usuarios de Windows: mi sincero deseo de no rendirme y tratar de resolverlo por nosotros mismos.
Instalar Docker
Comencé a conocer a Docker hace aproximadamente una semana, así que agregue sal gourmet y azúcar sintáctica al gusto. Tres ingredientes son suficientes para usted y para mí: Dockerfile, el concepto de imagen y contenedor.
Docker es una herramienta para crear y reproducir la configuración de cualquier sistema operativo con el conjunto de componentes necesarios. Dockerfile es un conjunto de comandos de shell que usualmente se usa en la máquina host, pero en este caso, todos se aplican a la llamada imagen de docker .
Para instalar Docker, considere la forma más simple: solicite un paquete a través del servicio de entrega apt-get :
sudo apt-get install -y docker.io
Le daremos al docker daemon todo lo que pida y cerraremos la sesión del sistema (observe el inicio de sesión correspondiente).
sudo usermod -a -G docker $USER
Preparando el espacio de trabajo
Raspberry Pi (en mi caso RPI 2 Modelo B) en la preparación más común es una CPU ARMv7 con el sistema operativo Raspbian (basado en Debian). Crearemos una imagen docker basada en Ubuntu 16.04, en la que informaremos el compilador cruzado, las bibliotecas del ejército y recopilaremos OpenCV en el mismo lugar.
Crea un papá donde se encuentre nuestro Dockerfile :
mkdir ubuntu16_armhf_opencv && cd ubuntu16_armhf_opencv touch Dockerfile
Agregue información sobre el sistema operativo base y la arquitectura armhf para el instalador del paquete apt-get :
FROM ubuntu:16.04 USER root RUN dpkg --add-architecture armhf RUN apt-get update
Tenga en cuenta que los comandos como FROM ... , RUN ... son la sintaxis de Dockerfile y están escritos en el archivo de prueba Dockerfile creado.
Volvamos al directorio principal ubuntu16_armhf_opencv e intentemos crear nuestra imagen acoplable:
docker image build ubuntu16_armhf_opencv
Durante la ejecución del comando apt-get update , debería ver los errores del siguiente tipo: Err:[] [url] xenial[-] armhf Packages
Ign:30 http://archive.ubuntu.com/ubuntu xenial-backports/main armhf Packages Ign:32 http://archive.ubuntu.com/ubuntu xenial-backports/universe armhf Packages Err:7 http://archive.ubuntu.com/ubuntu xenial/main armhf Packages 404 Not Found Ign:9 http://archive.ubuntu.com/ubuntu xenial/restricted armhf Packages Ign:18 http://archive.ubuntu.com/ubuntu xenial/universe armhf Packages Ign:20 http://archive.ubuntu.com/ubuntu xenial/multiverse armhf Packages Err:22 http://archive.ubuntu.com/ubuntu xenial-updates/main armhf Packages 404 Not Found Ign:24 http://archive.ubuntu.com/ubuntu xenial-updates/restricted armhf Packages Ign:26 http://archive.ubuntu.com/ubuntu xenial-updates/universe armhf Packages Ign:28 http://archive.ubuntu.com/ubuntu xenial-updates/multiverse armhf Packages Err:30 http://archive.ubuntu.com/ubuntu xenial-backports/main armhf Packages 404 Not Found Ign:32 http://archive.ubuntu.com/ubuntu xenial-backports/universe armhf Packages
Si observa el archivo /etc/apt/sources.list cada error corresponde a alguna línea, por ejemplo:
Error
Err:22 http://archive.ubuntu.com/ubuntu xenial-updates/main armhf Packages 404 Not Found
Línea en /etc/apt/sources.list :
deb http://archive.ubuntu.com/ubuntu/ xenial-updates main restricted
Solución :
Romper en dos:
deb [arch=amd64] http://archive.ubuntu.com/ubuntu/ xenial-updates main restricted deb [arch=armhf] http://ports.ubuntu.com/ubuntu-ports/ xenial-updates main restricted
Por lo tanto, debe reemplazar varias fuentes de paquetes. En nuestra ventana acoplable, los reemplazaremos todos con un comando:
RUN sed -i -E 's|^deb ([^ ]+) (.*)$|deb [arch=amd64] \1 \2\ndeb [arch=armhf] http://ports.ubuntu.com/ubuntu-ports/ \2|' /etc/apt/sources.list
Ahora apt-get update debería funcionar sin errores.
Ponemos los paquetes necesarios
Necesitamos suministrar paquetes de host como git , python-pip , cmake y pkg-config , así como crossbuild-essential-armhf , que es un conjunto de compiladores cruzados gcc / g ++ ( arm-linux-gnueabihf-gcc y arm-linux-gnueabihf-g++ ) y bibliotecas del sistema de la arquitectura correspondiente:
RUN apt-get install -y git python-pip cmake pkg-config crossbuild-essential-armhf
Desde lo inusual: también descargamos GTK (utilizado para dibujar ventanas en el módulo highgui), GStreamer y Python, pero con una indicación explícita de una arquitectura extranjera:
RUN apt-get install -y --no-install-recommends \ libgtk2.0-dev:armhf \ libpython-dev:armhf \ libgstreamer1.0-dev:armhf \ libgstreamer-plugins-base1.0-dev:armhf \ libgstreamer-plugins-good1.0-dev:armhf \ libgstreamer-plugins-bad1.0-dev:armhf
Y luego clonamos y recolectamos, indicando las banderas necesarias:
RUN git clone https://github.com/opencv/opencv --depth 1 RUN mkdir opencv/build && cd opencv/build && \ export PKG_CONFIG_PATH=/usr/lib/arm-linux-gnueabihf/pkgconfig && \ cmake -DCMAKE_BUILD_TYPE=Release \ -DOPENCV_CONFIG_INSTALL_PATH="cmake" \ -DCMAKE_TOOLCHAIN_FILE="../opencv/platforms/linux/arm-gnueabi.toolchain.cmake" \ -DWITH_IPP=OFF \ -DBUILD_TESTS=OFF \ -DBUILD_PERF_TESTS=OFF \ -DOPENCV_ENABLE_PKG_CONFIG=ON \ -DPYTHON2_INCLUDE_PATH="/usr/include/python2.7" \ -DPYTHON2_NUMPY_INCLUDE_DIRS="/usr/local/lib/python2.7/dist-packages/numpy/core/include" \ -DENABLE_NEON=ON \ -DCPU_BASELINE="NEON" ..
donde
CMAKE_TOOLCHAIN_FILE : la ruta al archivo cmake que define el proceso de compilación cruzada (establece el compilador deseado, restringe el uso de bibliotecas de host.
WITH_IPP=OFF , - deshabilita las dependencias pesadas.
BUILD_TESTS=OFF , BUILD_PERF_TESTS=OFF , deshabilita la compilación de prueba.
OPENCV_ENABLE_PKG_CONFIG=ON - para que pkg-config pueda encontrar dependencias como GTK. PKG_CONFIG_PATH es la ruta correcta donde pkg-config buscará bibliotecas.
PYTHON2_INCLUDE_PATH , PYTHON2_NUMPY_INCLUDE_DIRS : rutas necesarias para los contenedores de compilación cruzada para python2.
ENABLE_NEON=ON , CPU_BASELINE="NEON" - habilita la optimización NEON.
OPENCV_CONFIG_INSTALL_PATH : ajusta la ubicación de los archivos en el directorio de install .
Lo principal a lo que debe prestar atención después de la ejecución de cmake es que todos los módulos necesarios están ensamblados (python2, por ejemplo):
-- OpenCV modules: -- To be built: calib3d core dnn features2d flann gapi highgui imgcodecs imgproc java_bindings_generator ml objdetect photo python2 python_bindings_generator stitching ts video videoio -- Disabled: world -- Disabled by dependency: - -- Unavailable: java js python3 -- Applications: tests perf_tests apps -- Documentation: NO -- Non-free algorithms: NO
y se encontraron las dependencias necesarias, como GTK:
-- GUI: -- GTK+: YES (ver 2.24.30) -- GThread : YES (ver 2.48.2) -- GtkGlExt: NO -- -- Video I/O: -- GStreamer: -- base: YES (ver 1.8.3) -- video: YES (ver 1.8.3) -- app: YES (ver 1.8.3) -- riff: YES (ver 1.8.3) -- pbutils: YES (ver 1.8.3) -- v4l/v4l2: linux/videodev2.h
Todo lo que queda es llamar a make , make install y esperar a que se complete la compilación:
Successfully built 4dae6b1a7d32
Use esta id imagen para etiquetar y crear un contenedor:
docker tag 4dae6b1a7d32 ubuntu16_armhf_opencv:latest docker run ubuntu16_armhf_opencv
Y solo tenemos que bombear el OpenCV ensamblado fuera del contenedor. Primero, veamos el identificador del contenedor creado:
$ docker container ls --all CONTAINER ID IMAGE COMMAND CREATED STATUS PORTS NAMES e94667fe60d2 ubuntu16_armhf_opencv "/bin/bash" 6 seconds ago Exited (0) 5 seconds ago clever_yalow
Y copie el directorio de instalación con OpenCV instalado:
docker cp e94667fe60d2:/opencv/build/install/ ./ mv install ocv_install
Poner la mesa
Copie ocv_install en Raspberry Pi, configure las rutas e intente ejecutar OpenCV desde python.
export LD_LIBRARY_PATH=/path/to/ocv_install/lib/:$LD_LIBRARY_PATH export PYTHONPATH=/path/to/ocv_install/python/:$PYTHONPATH
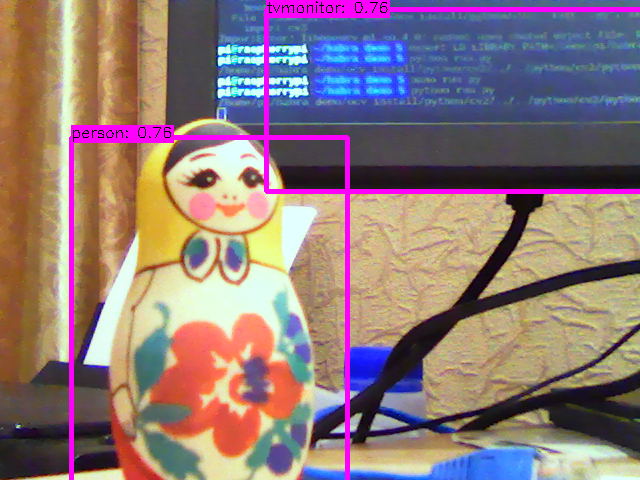
Ejecute el ejemplo de detección utilizando la red neuronal MobileNet-SSD desde https://github.com/chuanqi305/MobileNet-SSD :
import cv2 as cv print cv.__file__ classes = ['backgroud', 'aeroplane', 'bicycle', 'bird', 'boat', 'bottle', 'bus', 'car', 'cat', 'chair', 'cow', 'diningtable', 'dog', 'horse', 'motorbike', 'person', 'pottedplant', 'sheep', 'sofa', 'train', 'tvmonitor'] cap = cv.VideoCapture(0) net = cv.dnn.readNet('MobileNetSSD_deploy.caffemodel', 'MobileNetSSD_deploy.prototxt') cv.namedWindow('Object detection', cv.WINDOW_NORMAL) while cv.waitKey(1) != 27: hasFrame, frame = cap.read() if not hasFrame: break frame_height, frame_width = frame.shape[0], frame.shape[1] blob = cv.dnn.blobFromImage(frame, scalefactor=0.007843, size=(300, 300), mean=(127.5, 127.5, 127.5)) net.setInput(blob) out = net.forward() for detection in out.reshape(-1, 7): classId = int(detection[1]) confidence = float(detection[2]) xmin = int(detection[3] * frame_width) ymin = int(detection[4] * frame_height) xmax = int(detection[5] * frame_width) ymax = int(detection[6] * frame_height) if confidence > 0.5: cv.rectangle(frame, (xmin, ymin), (xmax, ymax), color=(255, 0, 255), thickness=3) label = '%s: %.2f' % (classes[classId], confidence) labelSize, baseLine = cv.getTextSize(label, cv.FONT_HERSHEY_SIMPLEX, 0.5, 1) ymin = max(ymin, labelSize[1]) cv.rectangle(frame, (xmin, ymin - labelSize[1]), (xmin + labelSize[0], ymin + baseLine), (255, 0, 255), cv.FILLED) cv.putText(frame, label, (xmin, ymin), cv.FONT_HERSHEY_SIMPLEX, 0.5, (0, 0, 0)) cv.imshow('Object detection', frame)
Eso es todo, un ensamblaje completo no lleva más de 20 minutos. Adjunto la versión final del Dockerfile continuación y, aprovechando esta oportunidad, propongo realizar una breve encuesta del equipo de OpenCV para aquellos que alguna vez tuvieron experiencia con la biblioteca: https://opencv.org/survey-2018.html .
Y sí, ¡felicidades por OpenCV 4! Este no es solo el trabajo de un equipo separado, es el trabajo de toda la comunidad: OpenCV 4 usted.
FROM ubuntu:16.04 USER root RUN dpkg --add-architecture armhf RUN sed -i -E 's|^deb ([^ ]+) (.*)$|deb [arch=amd64] \1 \2\ndeb [arch=armhf] http://ports.ubuntu.com/ubuntu-ports/ \2|' /etc/apt/sources.list RUN apt-get update && \ apt-get install -y --no-install-recommends \ cmake \ pkg-config \ crossbuild-essential-armhf \ git \ python-pip \ libgtk2.0-dev:armhf \ libpython-dev:armhf \ libgstreamer1.0-dev:armhf \ libgstreamer-plugins-base1.0-dev:armhf \ libgstreamer-plugins-good1.0-dev:armhf \ libgstreamer-plugins-bad1.0-dev:armhf RUN pip install numpy==1.12.1 RUN git clone https://github.com/opencv/opencv --depth 1 RUN mkdir opencv/build && cd opencv/build && \ export PKG_CONFIG_PATH=/usr/lib/arm-linux-gnueabihf/pkgconfig && \ cmake -DCMAKE_BUILD_TYPE=Release \ -DOPENCV_CONFIG_INSTALL_PATH="cmake" \ -DCMAKE_TOOLCHAIN_FILE="../opencv/platforms/linux/arm-gnueabi.toolchain.cmake" \ -DWITH_IPP=OFF \ -DBUILD_TESTS=OFF \ -DBUILD_PERF_TESTS=OFF \ -DOPENCV_ENABLE_PKG_CONFIG=ON \ -DPYTHON2_INCLUDE_PATH="/usr/include/python2.7" \ -DPYTHON2_NUMPY_INCLUDE_DIRS="/usr/local/lib/python2.7/dist-packages/numpy/core/include" \ -DENABLE_NEON=ON \ -DCPU_BASELINE="NEON" .. && make -j4 && make install