Una pequeña aventura de dos joysticks. La historia de cómo reparar el Rhino Throttle Controller X55 (X56) con un costo mínimo. ¡Lee con precaución! Contiene una actitud inaceptable hacia los circuitos y las reglas para cambiar dispositivos electrónicos.
Descargo de responsabilidad! Haciendo lo que no hice bien, ¡en el buen sentido, debe hacer un reemplazo de componentes o al menos colocar diodos TVS!
Tengo dos joysticks: kits Rhino X55 (X56), y ambos tienen un controlador del acelerador. El primero se estrelló casi un año después de la compra, por lo que apareció el segundo: enviaron un modelo X56 nuevo y más reciente en garantía. Pero la felicidad no fue larga, su controlador del acelerador también dejó de determinarse después de un tiempo.
Lo abandonamos, porque no había tiempo para meterse con la garantía, y la segunda mitad, el joystick en sí funcionó bien.
Y aquí, hace una semana, el hijo se encargó de reemplazar este en garantía, porque Saitek se mudó a Logitech, ¿por qué no probarlo?
Pero no funcionó, la garantía ya expiró en el segundo joystick.
Bueno, desde que comenzó tal bebida, no hay nada más que perder y descubrí el osciloscopio.
El método es simple: tocamos un osciloscopio en todos los lugares y vemos qué sucede.
En primer lugar, descubrí que el controlador no accede al chip SPI FLSAH separado (W25X40L), y debería leer el identificador del dispositivo USB desde allí. Además, miré el joystick en funcionamiento y resultó ser exactamente el mismo chip controlador CY7C64215-56LTXC y, en general, estaba claro qué y cómo debería funcionar.
Se volvió más interesante cuando noté que el chip de joystick en funcionamiento funciona con 5V a través de un convertidor DC-DC arriba / abajo desde la entrada de 5V desde USB. Bueno, quedó claro que estabilizan la potencia, pero a la salida de 5V. Pero las "víctimas del incendio" alimentaron 3.3V a través de un estabilizador reductor. A pesar de que el chip de alimentación es universal y puede operar dentro de 3.3V - 5.2V. "Hmmm", pensé, ¿tal vez tiene poco poder? Pero dar 5V no ayudó.
La segunda diferencia estaba en un pequeño chip de búfer que transfirió señales de datos desde USB 5V a 3.3V. Y cuando comparé las señales en las entradas del controlador, vi que las señales de la computadora están en niveles insuficientes (ver fotos).
En realidad reparar.
Bueno, teniendo en cuenta que en un joystick de 5V, las señales de datos USB van directamente al controlador y solo hay diodos de derivación allí, arranqué este convertidor de nivel e inserté las líneas de datos USB directamente en el controlador. ¡Y sucedió un milagro! Ha ganado!
Así que ahora tengo dos juegos de joystick que funcionan: Rhino X55 y Rhino X56.
Imágenes con subtítulos: explicación.
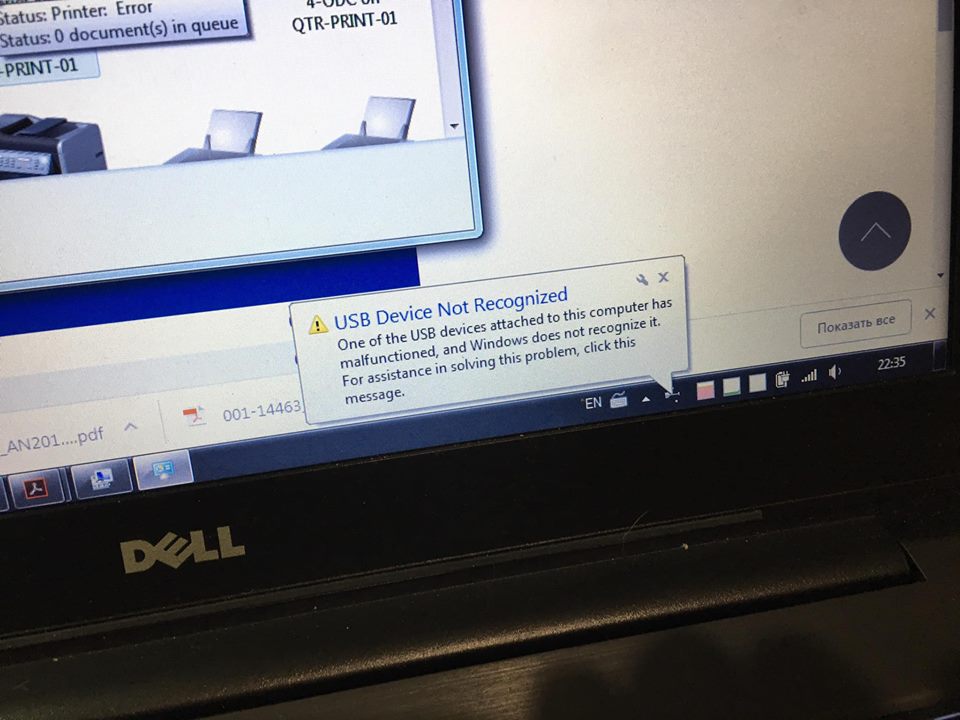
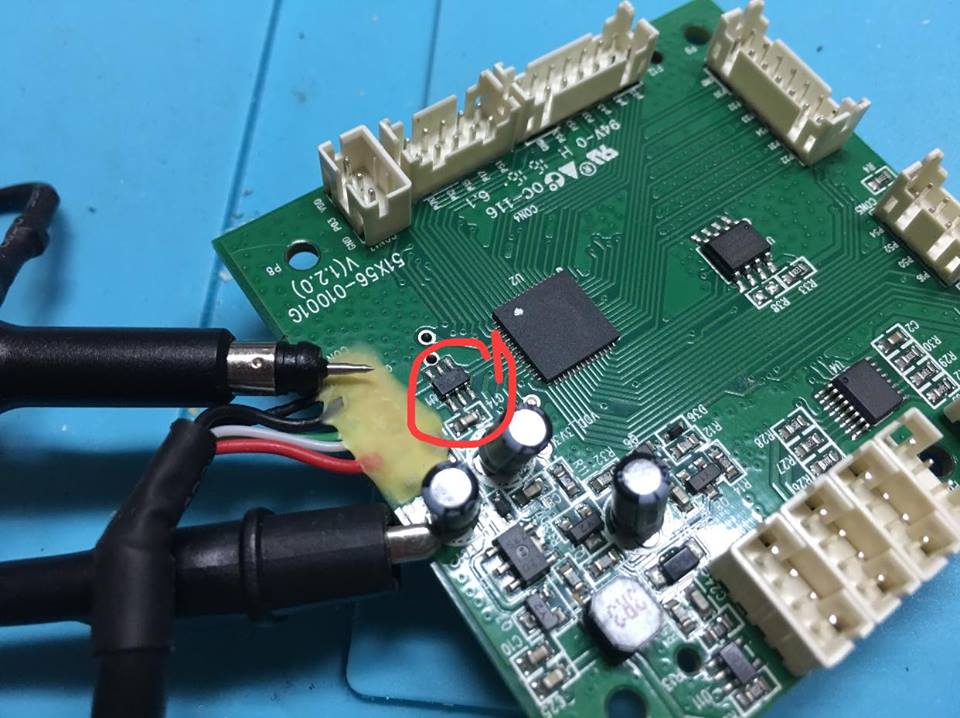
Este es el paciente antes de la cirugía.

Entonces no funciona
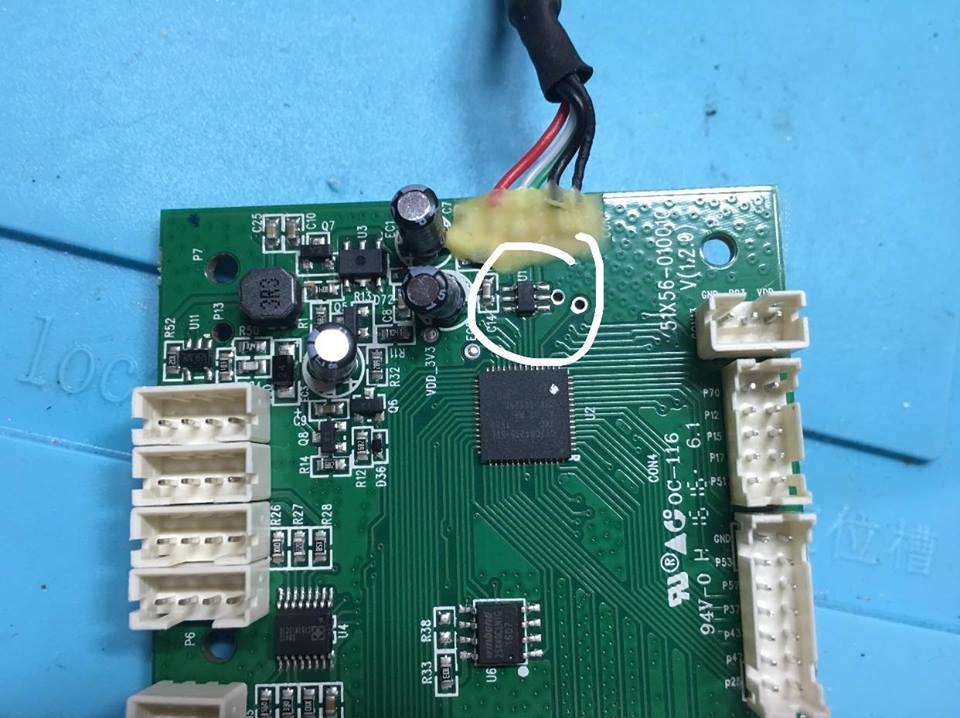
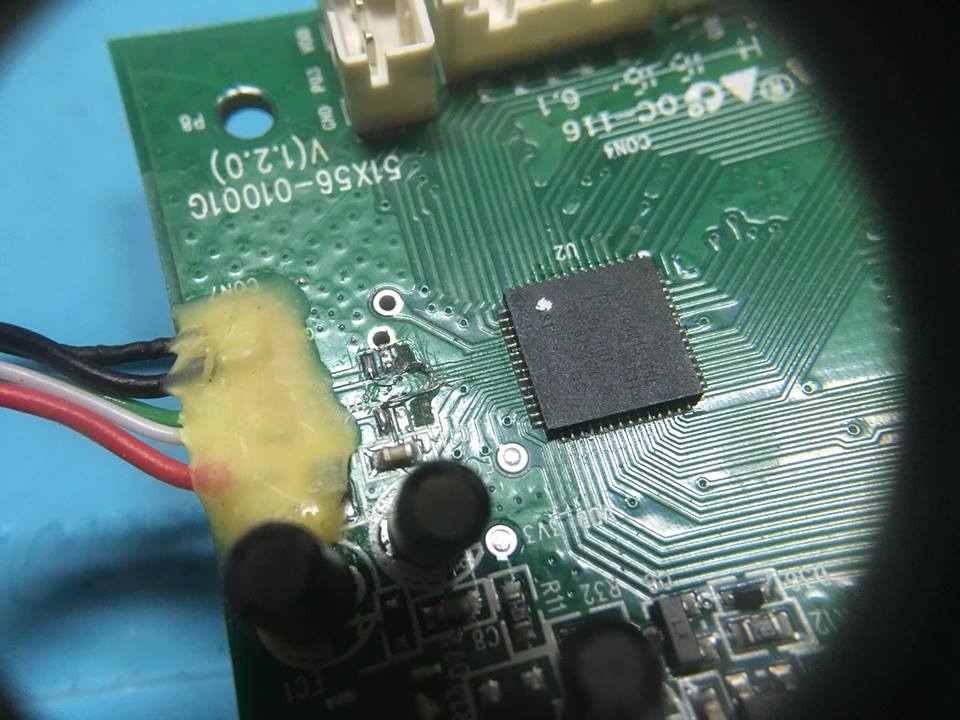
Esto está rodeado por un búfer malvado. Debajo está el chip CY7C64215-56LTXC real, y aún más bajo está el SPI FLASH W25X40L
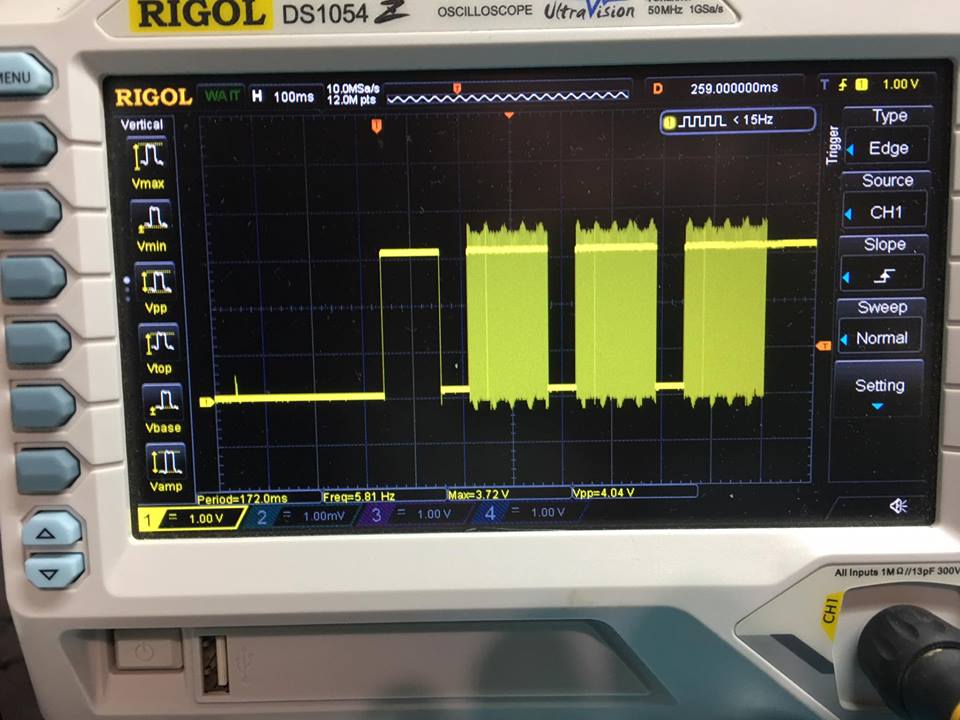
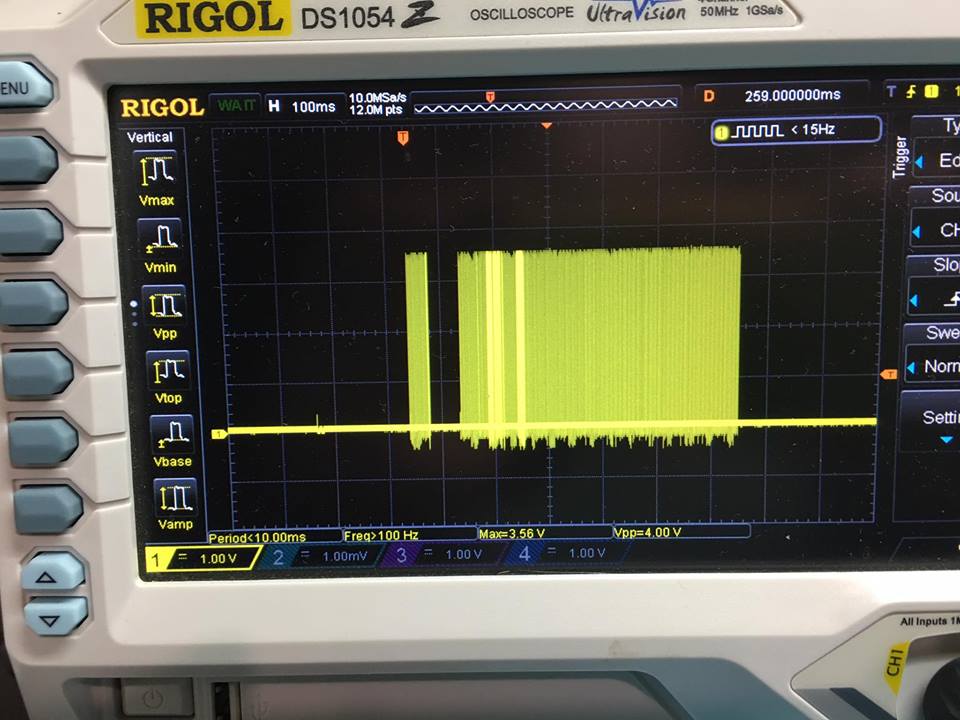
Esta es una señal USB desde la computadora al búfer. Presta atención al nivel: 3.5V
Esta señal también proviene del lado de la computadora, pero es una salida del búfer a la computadora

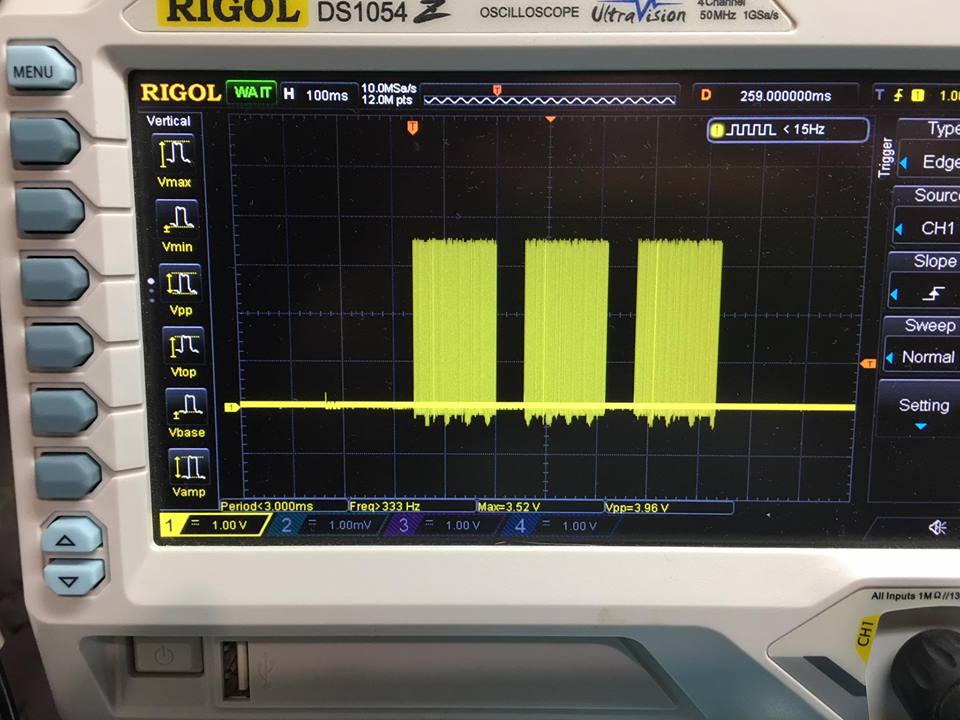
¡Y aquí está! ¡Diente enfermo! ”(C) esta es la señal después del búfer del controlador. Como puede ver, el nivel apenas alcanza los 2.5V, por lo que el controlador no reconoce las unidades lógicas ...

Esta es la señal del controlador (salida) al búfer. Nivel notable también
Aquí está, este malvado convertidor de buffer, preparándose para la amputación
Cucarachas extraídas!

Desafortunadamente, es muy difícil soldarlos: las pistas son muy delicadas y se desprenden en algunos lugares. Bueno, no importa; no soy el primero en soldar un poco así.

Hecho
Ahora debe estar lleno de algo

Esto es lo que conecto las pistas

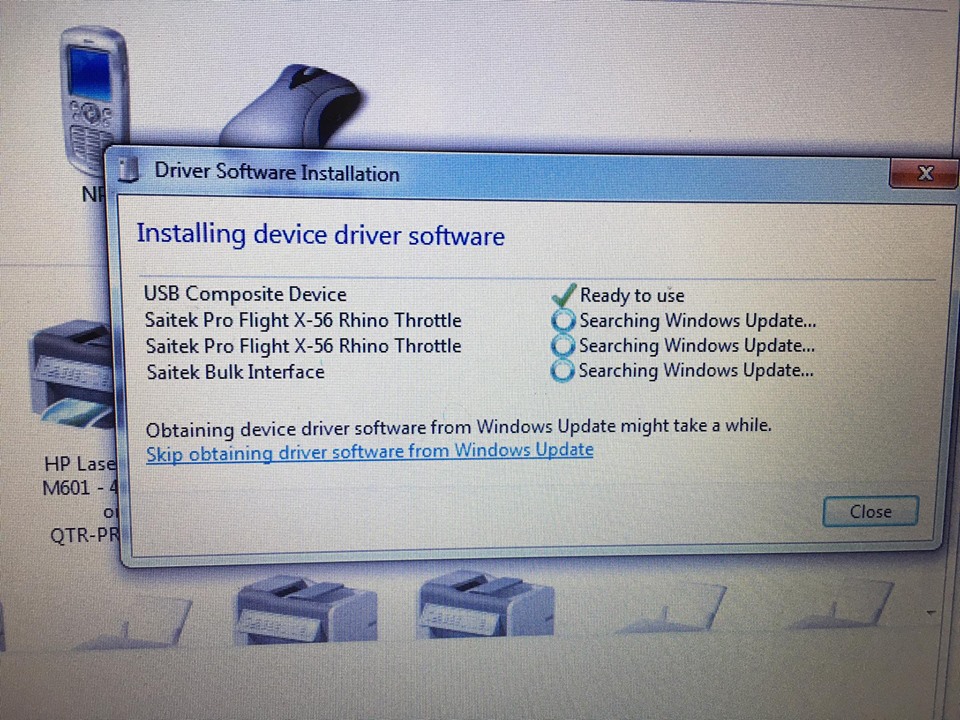
¡El resultado no se hizo esperar! ¡Todo está determinado ahora!
Conductores ...
Estas son señales sin un búfer, como puede ver por el nivel, son las mismas que el controlador dio sin (hasta) un búfer

Esto es de la computadora al chip: puede ver que el nivel es bastante suficiente ahora.
Resplandeciente! :)

Bueno, eso es todo. Los planes ponen protección en estas líneas.
Actualización:
En comentarios, rstepanov sugirió que la cucaracha remota es IP4234CZ6:
IP4234CZ6
Lo volveré a poner cuando llegue.