
El progreso en vehículos no tripulados se ha acelerado rápidamente en los últimos años. A partir del 1 de diciembre de 2018, los drones
podrán moverse libremente por las vías públicas de Moscú y Tatarstán. Parece un poco más y podemos subir al automóvil y hacer nuestro propio negocio, mientras que nuestro transporte se hará cargo de la gestión de todo el proceso de conducción. Sueños, sueños, pero ¿de qué es capaz realmente un automóvil así y desplazará a una persona?
En camino a la plena autonomía
La comunidad internacional de ingenieros automotrices (SAE International) ha desarrollado una clasificación de seis niveles de autonomía de automóviles. Este sistema demuestra el camino que los automóviles han recorrido en las últimas décadas y describe las dificultades que aún no se han resuelto para crear un vehículo verdaderamente no tripulado.
Nivel 0 : sin autonomía. Todas las máquinas que no interfieren con el proceso de control pueden atribuirse a este nivel. Sin un hombre, dicho automóvil no se moverá y no podrá evitar un accidente. ABS o sensores de estacionamiento: eso es todo lo que puede esperar de un automóvil de nivel cero.
Nivel 1 : ayuda mínima. Incluye autos que pueden dirigir la dirección o la aceleración / frenado con monitoreo constante por parte del conductor. Esto también incluye sistemas de asistencia de estacionamiento cuando el automóvil está conduciendo y el conductor está pedaleando.
Nivel 2 : asistencia con la atención del conductor. En el segundo nivel, hay una automatización completa de procesos simples que requieren dirección automática simultánea y control de movimiento. Esto incluye sistemas avanzados de asistencia al conductor avanzado (ADAS).
Nivel 3 - piloto automático limitado. El nivel fronterizo en el que ya es posible hablar sobre el piloto automático completo que funciona en el marco de escenarios individuales. A diferencia de los automóviles del segundo nivel, los automóviles del tercero no requieren atención constante del conductor: una persona puede ocuparse de sus asuntos, sin agarrar el volante cada medio minuto.
Nivel 4 - piloto automático en ciudades. Los autos de cuarto nivel difieren del piloto automático absoluto (5to nivel) en que necesitan mapas de terreno en 3D con los cuales se revisará el automóvil mientras conduce, escaneando el terreno. Si el automóvil de cuarto nivel está en un área que no está en dichos mapas, el piloto automático pasará al modo de tercer nivel o se apagará por completo.
Nivel 5 - piloto automático completo. El mismo piloto automático esférico en una aspiradora que puede moverse en cualquier clima y en cualquier parte del mundo: ya sea un camino roto sin marcar, un claro de bosque, un paso de montaña nevado, una metrópoli ocupada: un piloto automático de quinto nivel irá a todas partes, analizando la situación sobre la marcha. No necesita tarjetas 3D preparadas: un automóvil autónomo de quinto nivel con sus habilidades corresponde a un conductor vivo.
¿Cómo funcionan los autos autónomos reales?
Cámara + procesador de imagenAl desarrollar los primeros vehículos no tripulados, las cámaras fueron la principal forma de percibir el espacio alrededor del automóvil. Permitieron obtener rápidamente imágenes en el rango visible con un amplio ángulo de visión. Sin embargo, una sola imagen de cámara no es suficiente para que el automóvil autónomo funcione con éxito, un dron necesita un análogo electrónico del cerebro humano, es decir, un procesador especializado de procesamiento de imágenes.
La creación de dichos procesadores es llevada a cabo tanto por grandes empresas con experiencia como por nuevas empresas, dice Mobileye, que se ha convertido en parte de Intel, NVIDIA. Desarrollos similares se encuentran en Toshiba. La familia de procesadores
Toshiba Visconti procesa imágenes de cuatro cámaras, evaluando las imágenes a la vez de acuerdo con una variedad de criterios: marcas, automóviles en movimiento y estacionados, semáforos y letreros, faros, peatones y ciclistas. Después de identificar y clasificar objetos en video, el procesador transmite información al "cerebro" de la máquina, cuyo piloto automático ya decide el comportamiento óptimo. Así es como funciona el sistema extendido de asistencia al conductor ADAS, evitando colisiones y colisiones con peatones (criterio de autonomía de segundo nivel).
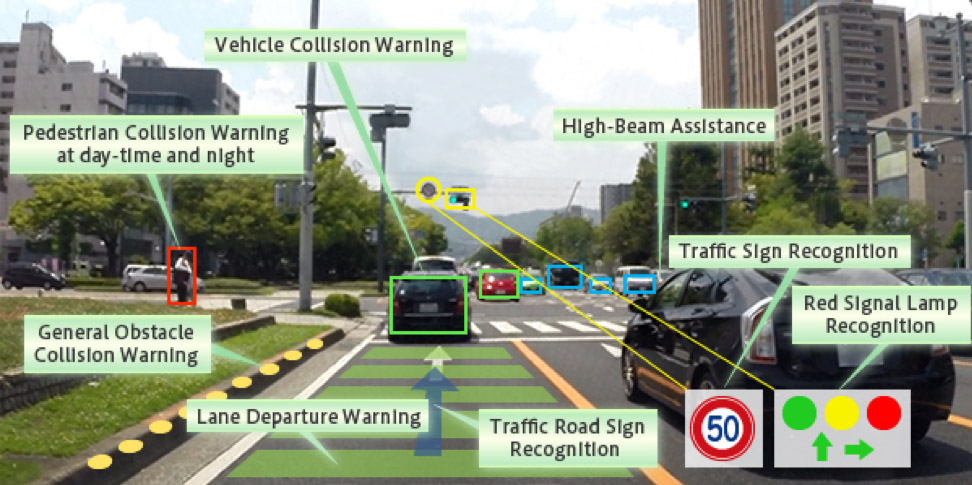 Un conjunto de cámaras y un procesador Toshiba Visconti monitorean la situación del tráfico mejor y más atentamente que una persona. Fuente: Toshiba
Un conjunto de cámaras y un procesador Toshiba Visconti monitorean la situación del tráfico mejor y más atentamente que una persona. Fuente: ToshibaEl ciclo completo de las generaciones anteriores de Toshiba Visconti desde la adquisición de imágenes hasta la emisión de información con resultados de reconocimiento tomó hasta 100 ms. En Visconti 4, el ciclo se redujo a 50 ms. En el mejor de los casos, el tiempo de respuesta del conductor es de 500 ms. Durante este tiempo, un automóvil que viaja a 80 km / h pasará 11 metros, una gran distancia en caso de una situación peligrosa en la carretera.
Visconti también resuelve el problema de la visión monocular: el procesador puede construir una reconstrucción tridimensional del espacio, analizando la secuencia de cuadros durante el movimiento. Esto funciona tanto para objetos móviles como fijos en la carretera y más allá.
RadarLas cámaras no pueden reconocer objetos remotos y construir mapas detallados, además, su funcionalidad depende directamente de las condiciones climáticas. Estas deficiencias se pueden compensar con radares que emiten señales de radio con una frecuencia de decenas de gigahercios. Idealmente identifican obstáculos en el espacio. Los radares con una frecuencia de 24 GHz y 77 GHz ya se utilizan en los costosos sistemas ADAS para frenar antes de detectar la intersección de rumbo con un peatón u otro automóvil. A diferencia de las cámaras, los radares tienen un ángulo de acción muy estrecho, inversamente proporcional al rango deseado. Además, el radar tiene un alto costo (al nivel de $ 1,000), lo que limita de inmediato el alcance de su uso exclusivo para automóviles representativos y premium.
Los radares hacen un excelente trabajo de localización de objetos, pero sin determinar su forma y solo en un rango estrecho.LidarLos lidares se consideran los sensores más efectivos, pero al mismo tiempo los más controvertidos para los automóviles autónomos. Construyen una imagen detallada del mundo que los rodea con la ayuda de rayos láser que se reflejan en los obstáculos y regresan. Además, los lidars hacen esto con una precisión inalcanzable para otros sensores. Usando un LIDAR, un automóvil crea su propio mapa 3D de decenas de metros alrededor, reconociendo automóviles, personas y cualquier obstáculo.
Entonces ve al mundo un auto con un LIDARSin embargo, lidar tiene más deficiencias que ventajas. En primer lugar, los lidares se vuelven indefensos bajo una fuerte lluvia o durante la nevada: los rayos láser se reflejan en las gotas de agua y los copos de nieve. En segundo lugar, el lidar debe tener una vista circular completa, lo que significa que crea una "joroba" en el techo del automóvil. En tercer lugar, los lidars no solo son caros, sino muy caros: los primeros modelos de Velodyne cuestan $ 75,000, los diseños modernos de Waymo cuestan $ 7,500.
 La línea de lidares Velodyne. Fuente: Velodyne.
La línea de lidares Velodyne. Fuente: Velodyne.La aparición de lidares de "estado sólido" sin partes móviles debería reducir el costo de los dispositivos por órdenes de magnitud en los próximos años. Velodyne afirma haber hecho un gran avance que reducirá el precio de los lidars a $ 50.
Toshiba, a su vez, está trabajando para mejorar la efectividad de los lidars. Entonces, este año se introdujo un
nuevo chip que combina cadenas para analizar datos a largas y cortas distancias. Esto nos permitió duplicar el alcance efectivo de los lidares a 200 m, así como eliminar el problema del deslumbramiento que afectaba la calidad de los reflejos.
¿Cómo funciona esto para ...
... Tesla
Para implementar el piloto automático, se instala un sistema de ocho cámaras con diferentes ángulos y rangos de visión, 12 sensores ultrasónicos en círculo y un radar frontal de largo alcance en los automóviles Tesla. Los sensores ultrasónicos son responsables de reconocer los automóviles en filas y obstáculos adyacentes cuando conducen a bajas velocidades. Las cámaras son responsables de encontrar peatones, automóviles, marcas y letreros. Los ayuda en este radar. El GPS se usa para moverse a lo largo de la ruta, y los sensores monitorean que el automóvil va estrictamente en carriles y evita accidentes. Por un lado, esto permite el uso del piloto automático Tesla en cualquier ciudad. Por otro lado, el piloto automático aún requiere la atención del conductor para funcionar.
Tesla intencionalmente no usa lidar; Elon Musk se opone abiertamente a los lidars, lo que justifica esto con su precio y el trabajo problemático en mal tiempo. Es difícil estar en desacuerdo con él: 7-10 mil dólares adicionales al precio y una "joroba" en el techo no agregarían el atractivo de Tesla.
No importa qué tan bien se vean un montón de cámaras, radares y sensores de ultrasonido, y tienen fallas de funcionamiento. En 2018, el Tesla Model S en modo piloto automático se estrelló contra un divisor de carretera, lo que causó la muerte del conductor. Como lo demostró la
investigación por parte de los propietarios del automóvil eléctrico, el piloto automático Tesla no pudo leer correctamente las marcas borradas, y las cámaras y los radares, a su vez, no vieron el peligro en la barrera de acero que se acerca rápidamente.
... WaymoLos sistemas Waymo usan lidar, cinco radares, ocho cámaras y GPS, y Chrysler Pacifica Hybrid (ahora 600, planeado comprar 62 mil unidades) y Jaguar I-PACE (20 mil unidades en planes) se seleccionan como operadores comerciales en serie.
 El automóvil eléctrico Waymo Jaguar I-PACE no es tan utilitario como el espacioso Chrysler Pacifica, pero se ve increíble, incluso el lidar en el techo no estropea la vista. Copyright: Waymo
El automóvil eléctrico Waymo Jaguar I-PACE no es tan utilitario como el espacioso Chrysler Pacifica, pero se ve increíble, incluso el lidar en el techo no estropea la vista. Copyright: WaymoAl conducir, Waymo usa datos de Google Street View, refiriéndose a él usando sus sensores. Gracias a esto, se logra una autonomía completa: a diferencia de Tesla, los autos Waymo realmente no requieren la intervención del conductor, sino que simplemente transportan pasajeros. A diferencia de Tesla, Waymo no vende automóviles, sino un servicio de transporte, es decir, robots.
El video panorámico de Waymo lo ayuda a comprender cómo su automóvil autónomo reconoce su entorno.El principal inconveniente de Waymo es la lista extremadamente limitada de ciudades donde operan los drones: para que el piloto automático funcione correctamente, el entorno urbano debe filmarse en 3D, y este es un procedimiento largo y complicado, por lo que Waymo actualmente opera en solo dos docenas de ciudades estadounidenses. Sin embargo, la expansión de la red de carreteras es solo cuestión de tiempo. Que lo pases muy bien.
... YandexYandex presentó su proyecto de vehículo no tripulado hace solo un año. Se instaló en el Toyota Prius un bloque de lidar, cámaras, radares, GPS e IMU, es decir, componentes típicos de los automóviles autónomos. De Yandex, el dron obtuvo una plataforma de software que se mostró bien tanto al conducir por las estrechas calles de Moscú del distrito de Khamovniki como al viajar largas distancias desde Moscú a Kazán.
Al llegar a Tatarstán, el automóvil Yandex permaneció allí, convirtiéndose en el primer taxi no tripulado en Rusia. Ahora trabaja en la ciudad de Innopolis, transportando pasajeros entre los cinco puntos principales. Y en octubre, apareció un taxi similar en el territorio de Skolkovo. En los planes distantes de la compañía de llevar taxis no tripulados a las calles de la ciudad en una base comercial.
... KAMAZEn 2016, el Instituto Estatal NAMI mostró el "minibús" no tripulado SHATL, que no era más que un concept car experimental. Dos años después, KAMAZ-1221 SHATL fue declarado el futuro proyecto en serie, que se pondrá en el transportador en 2022. El mini bus eléctrico con lidares, cámaras y sensores ultrasónicos hasta ahora se mueve con precaución a una velocidad de 10 km / h, pero a medida que mejora la plataforma de software, se promete que la velocidad se elevará a 110 km / h.
¿Qué cambiarán los drones?
La exclusión del factor humano aumentará las condiciones marginales de operación de los automóviles: aumente la velocidad máxima, reduzca el ancho de los carriles, reduzca la distancia entre los automóviles en la corriente. Como resultado, el rendimiento de las carreteras aumentará significativamente, la velocidad promedio aumentará y la cantidad de congestión disminuirá.
Según el Manual de capacidad de la autopista estadounidense, un carril de la autopista por hora pasa alrededor de 2.200 automóviles conducidos por personas. Varios estudios muestran que la transición a automóviles autónomos aumentará esta cifra a 7200-12000 automóviles por hora. Se logra un salto tan impresionante en la eficiencia del uso de la carretera al aumentar la velocidad segura y reducir la distancia entre los automóviles en la franja de 40-50 metros a 6-7 metros, para los automóviles que transmiten información sobre su velocidad y maniobras estimadas entre sí, tal distancia será suficiente para la seguridad movimiento
Sin embargo, todavía estamos lejos de un futuro tan no tripulado. Los autos en serie de fabricantes de automóviles conocidos acaban de adaptar el segundo nivel de autonomía, los mejores y más caros modelos se están preparando para pasar al tercer nivel. Pero en la próxima década, no vale la pena soñar con drones del quinto nivel de autonomía: durante mucho tiempo, una persona será la principal en el camino.