Hola a todos!
La cuestión del desarrollo físico de sus propios hijos es siempre relevante. El hijo menor cumplió tres años, además de caminar, quería encontrar clases para él con un sesgo deportivo. Como está interesado en varios tipos de transporte, la elección recayó naturalmente en la pista. Y después de ver los videos incendiarios, mientras los niños mayores se atrincheraban en las bicicletas, decidí investigar el tema con un poco más de detalle. Armado con una IMU de Amperka a 10 grados de libertad, Raspberry Zero W con una fuente de alimentación y 40 líneas de código en Python, fui a una escuela de running. Lo que salió de eso: mira debajo del corte)

Las bicicletas de carrera no están tan extendidas como las bicicletas o scooters para niños, pero tienen varias ventajas sobre otros modos de transporte. El niño puede sentarse en la silla de montar, como en una bicicleta, y empujar con las dos piernas alternativamente. Esto proporciona una carga más uniforme en ambas piernas y espalda. A diferencia de un scooter, donde solo funciona una pierna de empuje. Una ventaja adicional es que el niño aprende a equilibrarse. Es decir, se supone que la transferencia a una bicicleta de dos ruedas sin complicaciones.
Básicamente, los diseños de las runbikes son bastante simples. Este es un marco de metal (aluminio o acero), un volante, un sillín y dos ruedas (bombeadas para modelos más caros o de gomaespuma). Hay un par de modelos con suspensión de la rueda trasera.

La amortiguación de la rueda trasera me pareció un detalle particularmente importante. Un niño en una carrera inevitablemente saltará de la acera y viajará por caminos irregulares (vivimos en Rusia). Por lo tanto, la presencia de un amortiguador debería, en teoría, reducir la carga en la parte posterior. En el futuro, a medida que crezca la profesionalidad del joven piloto, el amortiguador también le permitirá realizar
saltos y otros trucos similares .
Después de hurgar en Internet, descubrí que nadie había cuantificado previamente las cargas que caen en el marco de la bicicleta al saltar de varios obstáculos. El interés en este tema y una pequeña cantidad de tiempo libre llevaron al hecho de que obtuve de los materiales disponibles un banco de pruebas simple.
Las aceleraciones se medirán con un acelerómetro de tres ejes del
sensor IMU fabricado por Amperka. No es posible usar el acelerómetro de teléfonos celulares para medir aceleraciones debido al límite de medición bajo (+ -2G). El rango de medición para cada uno de los ejes del módulo Amperka es + -8G, esperemos que esto sea suficiente.
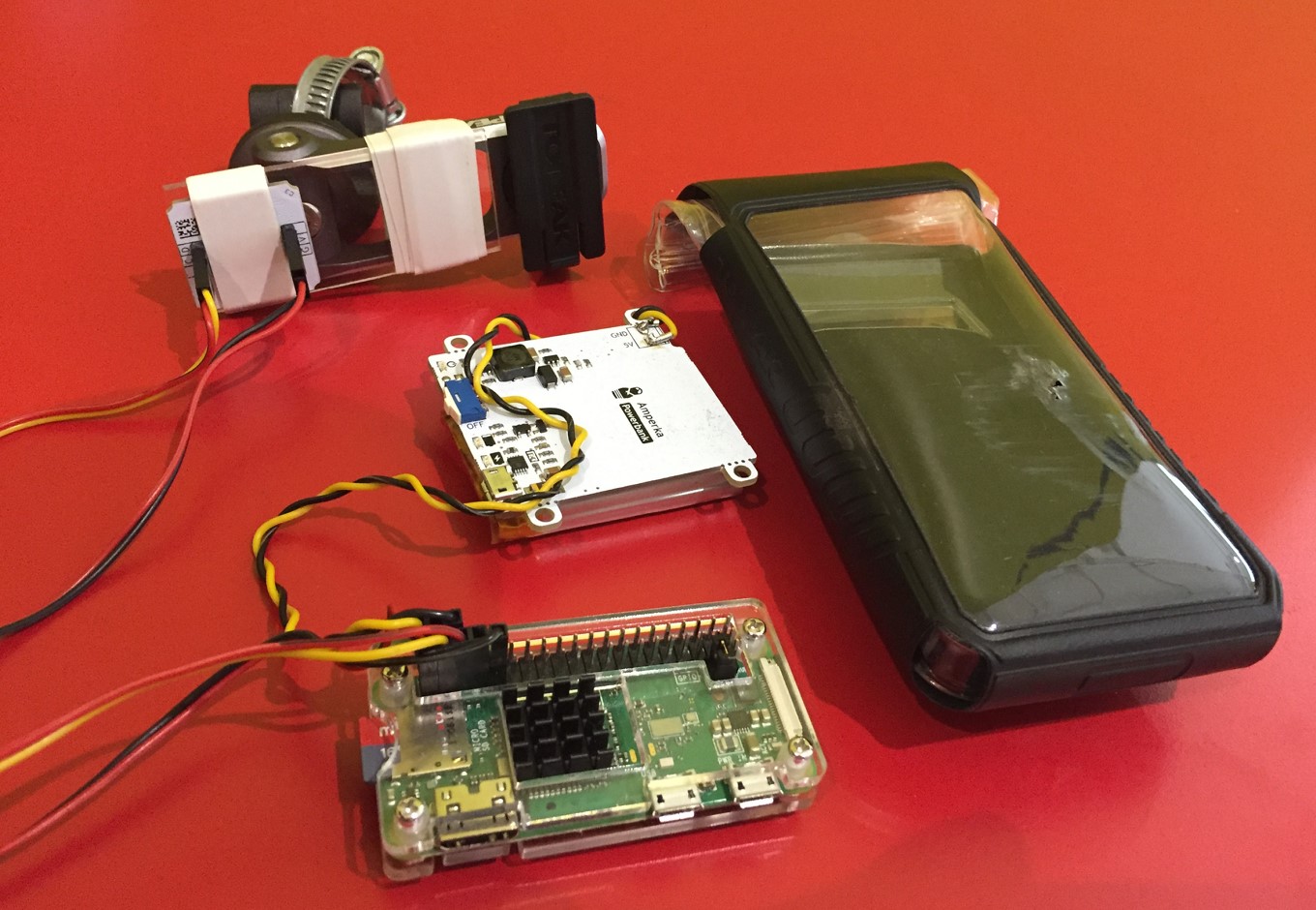
El sensor IMU se conectó al marco con el soporte Topeak (tuve que quitarlo temporalmente de mi bicicleta), un trozo de plexiglás y varias capas de cinta aislante. Para sondear el sensor, se usó una placa única Raspberry Pi Zero W. Una pequeña secuencia de comandos de Python sondeó el acelerómetro con un período de aproximadamente 10 ms:
imu.pyimport time from pytroykaimu import TroykaIMU imu = TroykaIMU() imu.accelerometer.set_range('8G') file_name = '' print(' ( )') file_name = str(input ()) file_name = file_name + '.csv' print(' , Ctrl+C') t0 = time.time() imu_array = [] while True: try: ax, ay, az = imu.accelerometer.read_gxyz() gx, gy, gz = imu.gyroscope.read_radians_per_second_xyz() imu_array += [time.time(), ax, ay, az, gx, gy, gz] time.sleep(0.006) except KeyboardInterrupt: t1 = time.time() lines = int(len(imu_array)/7) print(" - -", lines, '- ', file_name) imu_file = open(file_name, 'w') imu_file.write('time,ax,ay,az,gx,gy,gz' + '\n') for i in range(lines): imu_file.write(str(imu_array[7*i]) + ',' + str(imu_array[7*i+1]) + ',' + str(imu_array[7*i+2]) + ',' + str(imu_array[7*i+3]) + ',' + str(imu_array[7*i+4]) + ',' + str(imu_array[7*i+5]) + ',' + str(imu_array[7*i+6]) + '\n') imu_file.close() print (' , -', t1 - t0, '') break
Power Raspberry se eliminó del
Power Bank del mismo Amperka , y hice un arranque remoto desde una celda con un terminal instalado no para él. Escondí la placa única con una fuente de alimentación en una caja para un teléfono celular, y conecté el sensor IMU a la tija del sillín de las bicicletas de carrera estudiadas de la siguiente manera:

Tomamos medidas junto con Evgeny Ivanov de la
escuela BegovelMsk en Moscú . La escuela de atletismo para la prueba proporcionó amablemente dos motos (
Puky LR Ride y
Early Rider Trail Runner 14 ). Estos dos modelos son comunes en las escuelas de atletismo, el primero, principalmente para trucos, el segundo, para correr en bicicleta. Los neumáticos para ambos modelos se inflaron a aproximadamente 3,5 atmósferas.
La prueba consistió en el hecho de que el piloto Artyom saltó de un pequeño trampolín en la pista de carreras probada:

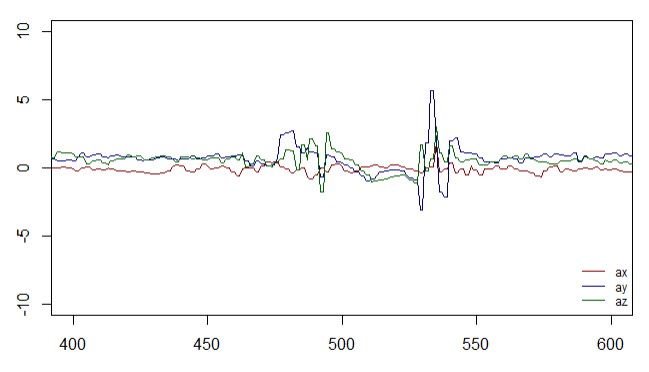
Como resultado, para cada salto en la tarjeta SD, Raspberry resolvió un archivo con encuestas de los tres ejes del acelerómetro cada 10 ms. Tal gráfico se puede derivar de cada archivo; las aceleraciones en G se trazan a lo largo del eje vertical:
Las gráficas para saltos similares resultaron ser bastante similares, pero las curvas de aceleración para los dos modelos estudiados de runbikes son muy diferentes. Para simplificar la imagen, solo los componentes verticales de las aceleraciones se trazan en el siguiente gráfico (para nuestro experimento, este es el eje Y dividido por el coseno del ángulo de desviación de la vertical). El gráfico también muestra la hora de llegada al trampolín (determinada por el video de las carreras) y la hora de tocar el piso después del salto (esta es la señal máxima en amplitud).
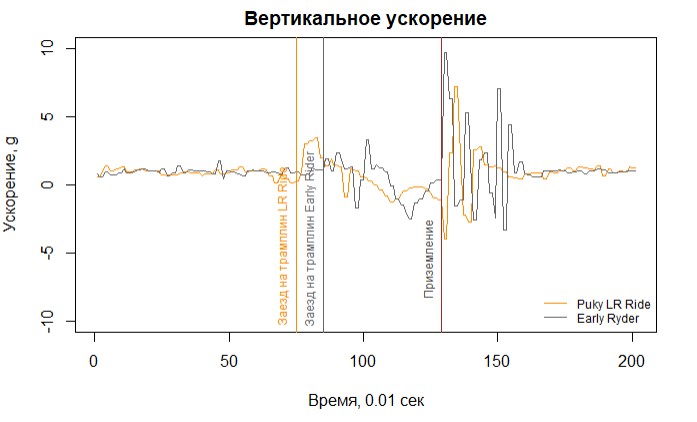
Como puede ver, el marco se está ejecutando (y con él el niño) cuando salta de un trampolín, ¡experimenta una carga de choque a corto plazo de hasta 10G! Inesperadamente Pensé que la carga era mucho más baja. Se puede concluir que no vale la pena correr por la acera mientras se está sentado como el quinto punto en la silla de montar. De lo contrario, el golpe caerá sobre la columna vertebral y los órganos internos del niño. Sería óptimo transferir esta carga a las piernas. Por lo tanto, para el modelo Puky LR Ride, hay un
paso especial disponible, en el que el niño se convierte en pies cuando realiza trucos.

¿Qué otras conclusiones se pueden sacar de estas curvas? Aproximadamente lo siguiente:
- El amortiguador en el LR Ride reduce la carga de choque en el cuadro del corredor en aproximadamente un 30% (probablemente aún más, ya que el acelerómetro se satura en el cuadro rígido Trail Runner 14). Además, la naturaleza del aumento en los cambios de carga, se vuelve más suave que un modelo sin amortiguador.
- El amortiguador ayuda a aumentar la distancia del salto, ya que el niño puede usarlo como una especie de resorte frente al trampolín (preste atención a la curva naranja antes de ingresar al trampolín).
- El amortiguador amortigua las vibraciones residuales del cuadro de la bicicleta de carrera, se puede reemplazar que después del salto, el LR Ride es mucho más pequeño que el Trail Runner 14, tanto en tiempo como en amplitud. Esto mejora el manejo de la carrera y la comodidad del ciclista.
Estos resultados inesperadamente interesantes se obtuvieron de un simple experimento. Al final, una vez más expreso gratitud a la escuela de atletismo, al piloto Artyom y al entrenador
Evgeny Ivanov .

¡Gracias por leer hasta el final y hasta pronto!