Como una nueva generación de agarres con percepción tridimensional mejorada y sensaciones táctiles, aprende a manipular objetos de una amplia gama
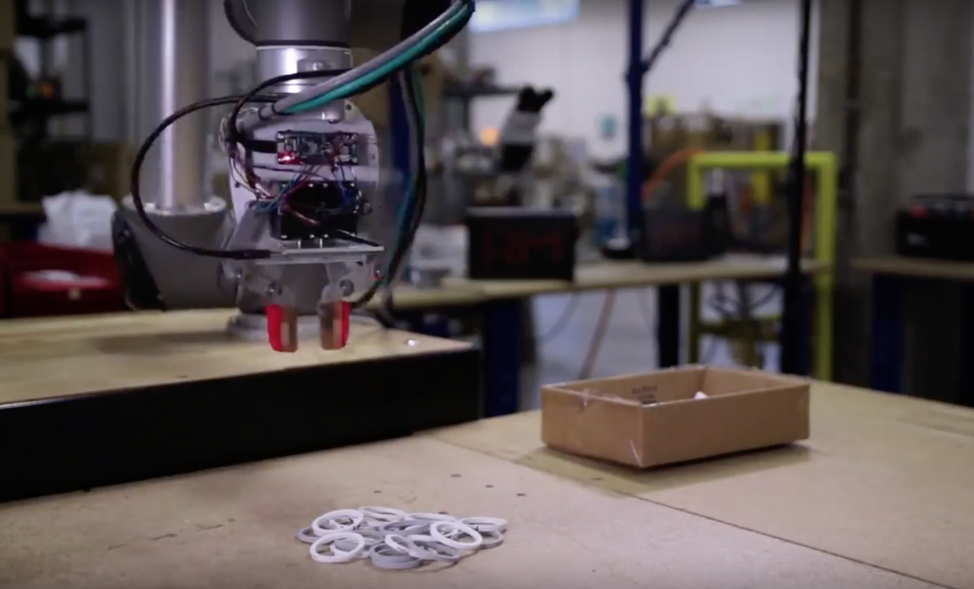
 La captura creada por Robotic Materials Inc., fundada por el autor del artículo, realiza la tarea de manipular una competencia de ensamblaje industrial en la Cumbre Mundial de Robótica de Tokio.
La captura creada por Robotic Materials Inc., fundada por el autor del artículo, realiza la tarea de manipular una competencia de ensamblaje industrial en la Cumbre Mundial de Robótica de Tokio.Aunque los robots han sido capaces de cocinar el desayuno
desde 1961, la manipulación de propósito general (MES) en el mundo real puede ser un problema más complejo que la conducción automática de automóviles. Sin embargo, es bastante difícil describir exactamente por qué esto es así. Si observa cuidadosamente el video de 1961, puede ver que la captura paralela de dos dedos es adecuada para una cantidad bastante grande de tareas, y solo la falta de sensaciones y sentido común incrustado en el robot le impide realizar tareas similares en el mundo real. Un artículo reciente en la revista Science nos recordó que incluso una tarea tan táctil como
ensamblar muebles está dentro de las capacidades de los robots industriales existentes. El verdadero problema es la gran cantidad de movimientos y manipulaciones posibles, y los movimientos que se requieren para hacer un sándwich con mantequilla no coinciden necesariamente con los movimientos necesarios para armar la silla.
Desde un punto de vista industrial, MES puede no ser un problema que deba abordarse. Después de todo, podemos crear una máquina para cualquier cosa: hacer espresso, lavar platos, ensamblar trigo, producir en masa zapatillas de gimnasia. Así es como se usa la mayor parte de la robótica en la industria moderna. Incluso los robots que se promocionan como "máquinas de colaboración" básicamente se convierten en partes de una máquina más compleja en una línea de ensamblaje (y simplemente no necesita un protector para funcionar de manera segura). Los intentos de desarrollar un MES que sea científicamente interesante se miden en relación con tales casos de uso. Debido a esto, las ventajas de una solución generalizada a un problema se vuelven menos obvias y corren el riesgo de quedar atrapados en un "callejón de ineficiencia" cuando los inversores y la industria pierden interés en ellos. Sin embargo, los procesos de producción y entrega incluyen una gran cantidad de diferentes etapas de manipulación. Incluso si el valor de cada etapa tiende a cero, su valor total es económicamente significativo.
¿Cómo sabemos que la solución al problema de manipulación se generalizará lo suficiente como para revelar este valor? La comunidad de desarrollo de robótica ha propuesto varias opciones de competencia en las que es necesario resolver varios problemas o manipular varios objetos. Estas son, por ejemplo, competencias como
RoboCup @ Home ,
IROS y
Amazon Picking Challenge . Aunque estos concursos están haciendo campaña por soluciones generalizadas, aún es difícil encontrar tareas que las soluciones especializadas no puedan hacer frente mejor. Por ejemplo, el equipo IROS, ganador de Corea, utilizó el robot
Baxter y un sistema de bloques de espuma autoadhesivos para manipular elementos como platos y cucharas. Del mismo modo, la mayoría de las tareas en el Amazon Picking Challenge se pueden lograr con una sola bomba de vacío. De hecho, necesitamos una solución única para las manipulaciones que se adapte bien a todas estas tareas.
Se ofreció una visión diferente de las cosas en una competencia industrial en la Cumbre Mundial de Robótica en Tokio, donde ofrecieron un premio de $ 130,000 a un equipo que podría proporcionar una solución generalizada para varias tareas industriales de cargar un contenedor y ensamblar elementos que podrían cambiarse en un día. Los equipos primero necesitaban obtener objetos con canastas muy diferentes (desde tuercas M3 hasta motores eléctricos y correas de transmisión flexibles), colocarlos en un contenedor y luego ensamblar estructuras complejas a partir de ellos. Para tal competencia, se necesita una solución de manipulación que no solo pueda capturar y manipular objetos, sino que también pueda reprogramarse fácilmente durante el día de la competencia. En el caso de la creación exitosa de tales robots, podrían usarse como asistentes en el ensamblaje de muebles, asistencia en el movimiento u otras tareas de manipulación que las personas puedan entender fácilmente, pero los robots modernos no pueden.
Bombas de vacío, empuñaduras y robots blandos.
¿Qué opciones tenemos para lograr MES? En la automatización industrial, dominan tres paradigmas competitivos: bombas, agarres mecánicos y brazos, y más recientemente, robots blandos. Las bombas están en primer plano porque las ventosas están deformadas y toman la forma de un objeto, incluso cuando su ubicación no se conoce con exactitud. Después de eso, puedes aspirar aire, lo que hace que el recipiente sea sólido y crea una restricción anular en el movimiento del objeto. Esta es una opción atractiva, ya que una ventosa es capaz de capturar una gran cantidad de objetos diferentes. Sin embargo, la ventosa no resuelve todos los problemas, por ejemplo, cuando el objeto es demasiado pesado, demasiado poroso, cuando para manipulaciones adicionales es necesario mover el objeto con precisión o aplicarle ciertos efectos.
 Los objetos con agujeros son difíciles de agarrar con solo una ventosa
Los objetos con agujeros son difíciles de agarrar con solo una ventosaLa aplicación exacta de fuerzas se puede utilizar cuando se utilizan pinzas mecánicas, que a menudo se implementan en forma de agarres paralelos o dos
mecanismos de cuatro enlaces . Las soluciones de tres dedos se usan con mucha menos frecuencia, y se muestran bien si es necesario, capturas de objetos cilíndricos desde arriba. El problema con los apretones apretados es que la velocidad de agarre debe ser cero en contacto con el objeto para evitar transmitir impulsos innecesarios. En el caso de los contactos elásticos, el impulso se mantiene, como resultado de lo cual pequeños objetos rebotan de la captura a alta velocidad. El rebote puede reducirse aplicando un agarre deformable para una mayor plasticidad de contacto, aumentando la precisión de la percepción para que el agarre pueda cerrarse a tiempo o restringiendo el posible movimiento del objeto.
En casos extremos, estas medidas conducen al uso de agarres completamente suaves, cuya deformabilidad evita que el objeto rebote, y la suavidad reduce la precisión de percepción necesaria. El éxito de la captura radica en la gran área de contacto para maximizar la fricción y reducir los grados de libertad de rotación del objeto. Al sujetar una barra cuadrada con una pinza de dos dedos, debemos colocarla de manera que los dedos queden paralelos a los dos planos de la barra. Un agarre suave no necesita determinar la orientación de la varilla y planificar el agarre, ya que simplemente envolverá el objeto. Pero la deformabilidad de los agarres, reduciendo los requisitos de percepción y planificación, complica la aplicación controlada del esfuerzo. Se desconoce la posición del objeto en la mano suave, y su deformabilidad no permite que los esfuerzos se apliquen de manera controlada. Al capturar y luego soltar el objeto, esto puede no ser un problema, pero complica enormemente la manipulación en la que necesita levantar el objeto y colocarlo correctamente.
Se pueden lograr buenos resultados prácticos combinando un control de posición simple y limitando el par máximo de los motores. Al igual que los brazos robóticos blandos y deformables, una pinza con control de resistencia puede ajustarse al objeto, compensando imprecisiones en la percepción.
Por lo tanto, el agarre ideal debería volverse duro o suave según sea necesario, permitiéndole capturar objetos con una percepción y planificación mínimas, eliminando las incertidumbres en la ubicación del objeto y permitiendo una manipulación rigurosa. Al mismo tiempo, la superficie de captura debe mantener un contacto continuo con el objeto. Esto se puede lograr combinando las técnicas anteriores. Por ejemplo, un agarre suave puede volverse rígido con un atasco granular, o el mecanismo de succión puede complementarse con un agarre para proporcionar restricciones adicionales. El agarre mecánico se puede complementar con una ventosa o almohadillas electrostáticas para una adhesión rompible. La mano humana hace un trabajo increíble al combinar estas propiedades: la combinación de huesos duros y tejidos blandos le permite variar la rigidez, puede cubrir objetos y mantener la capacidad de controlar con precisión. Estas oportunidades se logran con almohadillas suaves para los dedos, fricción de la piel y la capacidad de pegarse, como un pequeño trozo de papel pegado a un dedo.
Puños de control de par
Algunas de las funciones de fácil acceso nos permiten combinar los beneficios de los robots blandos y convencionales para crear soluciones MON comercialmente atractivas. Uno de ellos es el control de resistencia aplicado a los agarres tradicionales de dos dedos. Al controlar la resistencia, controlamos la resistencia a los movimientos externos impuestos por el medio ambiente. Se pueden lograr buenos resultados prácticos combinando un control de ubicación simple con una limitación del par máximo de los motores. Al limitar el torque, un agarre rígido puede volverse arbitrariamente deformable (dentro de la precisión de los sensores de torque). Al igual que su equivalente totalmente deformable, una empuñadura con control de resistencia puede adaptarse al objeto, compensando la percepción inexacta. Al mismo tiempo, tal esquema puede volverse difícil para una manipulación precisa. El control de resistencia junto con la percepción de la posición de los dedos es una forma de sensación táctil. La captura podrá determinar la presencia de objetos en el entorno, la posición de seguimiento y el par. Los movimientos serán suaves, compensando la imprecisión de la percepción.
 Arriba: agarrando fresas usando control de resistencia. La reducción del par máximo permitido permite que los dedos se detengan al entrar en contacto con un obstáculo y no aplastar la baya.
Arriba: agarrando fresas usando control de resistencia. La reducción del par máximo permitido permite que los dedos se detengan al entrar en contacto con un obstáculo y no aplastar la baya.
Abajo: captura un objeto sólido con control de resistencia. El control de torque permite que los dedos se muevan hasta que ocurra el contacto. Conociendo la posición de cada dedo, puede ingresar el control de la posición a nivel de todo el brazo.Las empuñaduras controladas por torque pueden servir como una plataforma para incorporar investigaciones recientes sobre manipuladores suaves: complementando las yemas de los dedos y la palma de la mano con una ventosa, combinamos los beneficios del control preciso de la posición y el esfuerzo con la fiabilidad de las ventosas. El sensor de torque en las articulaciones de los dedos se puede complementar con sensores táctiles que miden la presión, ubicados estratégicamente en la empuñadura. Los sensores táctiles de la palma y las puntas pueden ayudar a distinguir si un obstáculo externo impide el movimiento de los dedos o si la mano toca el objeto deseado. Los sensores táctiles también agregan directamente sensores visuales, determinando el momento de contacto y mejorando la evaluación de la orientación del objeto y el lugar donde la mano lo agarró.
Los logros modernos de la percepción tridimensional hacen que el objetivo de MES esté más cerca que nunca. Los sensores tridimensionales como Intel RealSense son capaces de detectar la presencia de objetos a 11 cm de la cámara con una precisión que le permite capturar incluso
objetos pequeños como tuercas M3 , y ya existen soluciones complejas en el mercado, por ejemplo, Robotic Materials Inc., basado en investigaciones de mi laboratorio, acaba de
lanzar una beta de su mano. El trabajo conjunto de percepción tridimensional precisa, control de resistencia para una interacción suave con el entorno y varios métodos de sensación táctil que le permiten evaluar el éxito de la captura, le permiten implementar una manipulación confiable de objetos en un entorno inexacto.
Por ejemplo, recientemente demostramos el llenado móvil de contenedores, en el que se requiere que el robot obtenga objetos de tres tipos diferentes (tuercas M3, parte del mecanismo y correa de goma) de las cestas, cuya ubicación en la mesa solo se conoce aproximadamente. A pesar del error de 10 cm introducido por el transporte autónomo que se movía a lo largo de varios puntos fronterizos del almacén, el robot pudo detectar cestas y objetos individuales utilizando una percepción tridimensional integrada en la mano. La limitación de par se utiliza para interactuar con precisión con el contenido de las cestas y minimiza el impacto de posibles colisiones. La percepción táctil mediante la medición de par se utiliza para medir el éxito de un agarre.
A pesar de los impresionantes éxitos de la percepción tridimensional, el control de resistencia y la percepción táctil en el caso MES, estas tecnologías contradicen el paradigma industrial predominante de soluciones especializadas para manipuladores. Cualquier forma de percepción lleva tiempo e impone restricciones en la velocidad de captura necesaria para limitar la energía de los impactos inesperados. Por lo tanto, a la vanguardia del MES estarán las pequeñas y medianas empresas que operan con una gran variedad y una pequeña cantidad de productos, así como grandes actores que desean diferenciar sus productos, reduciendo el ciclo de producción y aumentando las posibilidades de personalización. Al mismo tiempo, los robots móviles se encuentran cada vez más en almacenes, hoteles y hospitales. En tales situaciones, ciertas manipulaciones como la carga, descarga y mantenimiento pueden aumentar en gran medida el valor de tales robots, creando los requisitos económicos necesarios para resolver la tarea de manipulación de propósito general.