Probablemente cada conductor de vez en cuando trata de evaluar su habilidad para conducir. Cuando les dice a los niños, por ejemplo, cómo conducir un automóvil, piensa en cómo y por qué sabe cuándo el automóvil de adelante girará a la izquierda o la derecha. Por qué la atención se enfoca automáticamente en el perro que camina por el camino, pero no responde a las ramas de los árboles que cuelgan sobre el camino. Hay muchas preguntas de este tipo, pero no todas son respondidas.
Para aprender a conducir, debe comprender muchos principios y conocer las reglas; esto es cierto tanto para los humanos como para la inteligencia artificial. Este último debe prestar atención a evaluar miles de factores: dónde y cuándo reducir la velocidad, dónde apagar y dónde acelerar.
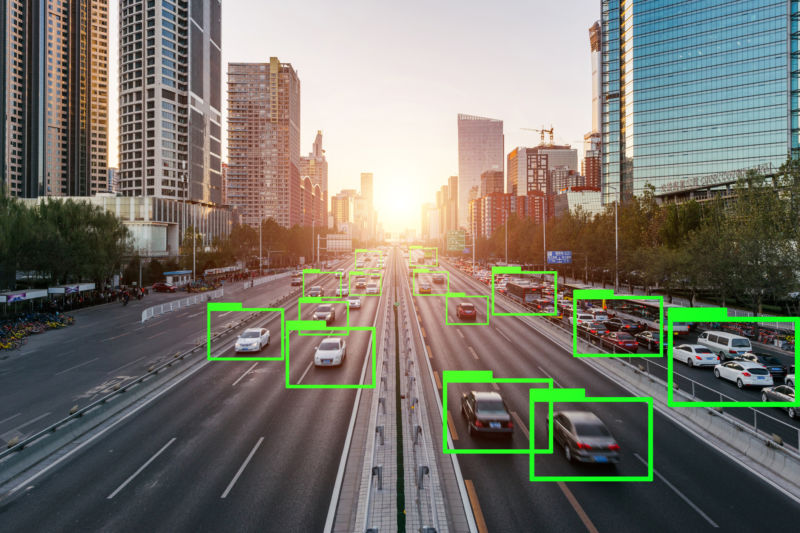
Los automóviles con los niveles más altos de autonomía no solo deben reconocer marcas, señales y todo lo demás, sino que también deben poder
responder rápidamente a situaciones inusuales, que son muchas en la carretera. Incluso los robomobiles, cuyo desarrollo se dedica durante años, no siempre responden adecuadamente a tales situaciones.
Un ejemplo es el automóvil robótico Uber, cuyo software decidió ignorar un objeto implícito en la carretera, que resultó ser una mujer vestida de oscuro, e incluso con una bicicleta cruzando la carretera en el lugar equivocado.
Actualmente, se acostumbra distinguir seis niveles de autonomía de las máquinas: desde cero (todas las operaciones son realizadas por una persona, no hay autonomía) hasta el quinto (todas las operaciones son realizadas por una computadora de a bordo sin intervención humana). En la gran mayoría de los casos, los robomobiles alcanzaron el segundo nivel de autonomía, incluido el famoso Tesla con su piloto automático avanzado.
Daimler ha hecho un buen progreso, pero las pruebas de sus robocars se llevan a cabo en Alemania, donde las marcas en la carretera y ellas mismas son casi perfectas, y los conductores tradicionalmente siguen las reglas de la carretera.
Waymo también está haciendo un buen progreso: el otro día,
anunció el lanzamiento de un servicio robotax totalmente autónomo. Es cierto que el conductor todavía está presente en la cabina, a quien la compañía llamó el "operador de seguridad". Si algo sale mal, el operador tomará el control. Lo más probable es que los robomóviles de niveles más altos de autonomía no aparezcan en las carreteras hasta los años 20, pero tal vez. Y despues.
Lo más probable es que se pueda lograr una autonomía completa solo después de la aparición de una infraestructura especializada, que debería ser casi más inteligente que el propio robot. Este último debe aprender y comprender de manera independiente lo que sucede a su alrededor, luego, tomar decisiones sin la participación del operador.
Un ejemplo es la situación cuando un pasajero viaja en un robomóvil en una tarde lluviosa. De repente, un gato cruza el camino por delante. ¿Qué debe hacer un robot robótico? Obviamente, sus sistemas deben reconocer definitivamente el obstáculo por delante, para que la máquina realice la maniobra necesaria. Pero es necesario conocer las reglas locales de velocidad, imaginar cuán resbaladizo puede ser el asfalto, además de comprender dónde está el automóvil en este momento. Parte de la información puede obtenerse de fuentes de terceros (el mismo pronóstico del tiempo, temperatura, humedad y condiciones del viento), lo que requiere un canal de Internet amplio y confiable, muy probablemente, 5G.
Además del gato, puede haber otros obstáculos alrededor, por ejemplo, robomobiles, que también intentan evitar una colisión. Es decir, los robomobiles deben poder "comunicarse" para representar bien las acciones de los demás en un momento dado. Y necesitas comunicarte en tiempo real. De lo contrario, una colisión es inevitable, cargada de una amenaza para la salud y la vida del propietario de la máquina.
Además, el robot robótico también debe ser capaz de allanar el camino óptimo hasta el punto final de viaje. Esto significa que la máquina necesita datos de mapas, información de marcado, letreros y otra información. Para ampliar la gama de capacidades de los robomobiles, siempre deben mantenerse en contacto entre sí para intercambiar información sobre el medio ambiente. Pero aún queda la cuestión de las máquinas que las personas controlan, resulta que también deben estar equipadas con sistemas de comunicación con robomobiles; de lo contrario, estos últimos no entenderán lo que están haciendo los primeros.
Bueno, si imagina que algo podría suceder con el canal de comunicación más amplio, incluso si el problema es temporal, la situación se vuelve aún más complicada. Y no hemos mencionado problemas comunes como "problemas de tranvía", además de muchos otros.
Lo más probable es que no se puedan esperar niveles de autonomía AI 4-5 en los próximos años; aparecerán muy pronto.