
Tal vez, todos pueden volar un quadcopter ahora, si lo desean. Pero para resolver el problema del control autónomo, de modo que no necesite mover las palancas del control remoto y monitorear constantemente el dron; en esta configuración, la solución puede requerir muchos recursos: comprar, ensamblar, soldar, configurar, despegar, soltar y, después de la caída, volver al comienzo del ciclo.
Al enseñar a los jueces / maestros de Aeronet sobre nuestro proyecto, nos enfrentamos a la necesidad de una programación simplificada de "entrada en el tema" de vehículos no tripulados para maestros de robótica / informática, que ya tienen un conjunto de conocimientos básicos.
Hay una manera fácil de aprender los conceptos básicos de la programación de vuelos con drones: un entorno de simulación virtual, un ejemplo paso a paso del uso que consideraremos en nuestro artículo.
No necesita comprar nada para actualizar sus habilidades básicas de programación de drones: solo use el proyecto de simulador de drones jMAVSim PX4. PX4 es un potente paquete de software de código abierto diseñado para su uso en una variedad de vehículos no tripulados, tanto volando como viajando en tierra. El código fuente del software del proyecto está en Github .
Inicialmente, los autores de PX4 recomiendan Linux Ubuntu LTS como entorno de desarrollo. También hay soporte para Mac. Este año, apareció un entorno de simulación y desarrollo para Windows en Cygwin, que puede simplificar la vida de las instituciones educativas rusas que usan Windows en las clases de informática.
A continuación, consideraremos el proceso de instalación, construcción y ejecución del simulador en Linux y Windows.
Instalación y ejecución de jMAVSim en Linux Ubuntu
Los desarrolladores de PX4 recomiendan Linux Ubuntu 16.04 LTS como su sistema estándar. Linux le permite construir el paquete PX4 para todos los sistemas compatibles (plataformas de hardware basadas en NuttX, Qualcomm Snapdragon Flight, Linux, entorno de simulación, ROS).
Primero, agregue el usuario al grupo de marcado:
sudo usermod -a -G dialout $USER
Iniciemos sesión en el sistema para que los cambios surtan efecto.
La cadena de herramientas de desarrollo para Pixhawk / NuttX, que incluye jmavsim, se instala automáticamente utilizando el script ubuntu_sim_nuttx.sh . Debe descargar el script en el directorio del usuario y ejecutarlo con el comando
source ubuntu_sim_nuttx.sh
Todas las preguntas formuladas por el guión se responden positivamente.
Al final del guión, reinicie la computadora.
Nos queda por descargar el código fuente del controlador que controla el vuelo y construirlo.
Clonamos el repositorio de software del controlador de vuelo PX4 con github:
git clone https://github.com/PX4/Firmware.git
En la carpeta Firmware ahora tenemos el código fuente completo que se ejecuta en el controlador de vuelo (y en el simulador). En el futuro, puede ser útil tanto para estudiar como para realizar cambios. Vaya a la carpeta de firmware copiada del repositorio:
cd src/Firmware
Compilamos y ejecutamos el simulador:
make px4_sitl jmavsim
El primer proceso de compilación lleva algo de tiempo. Después de completar con éxito, la consola PX4 aparecerá en la pantalla:

El dron se puede enviar al vuelo ingresando el comando en la consola:
pxh> commander takeoff

Aterrizaje de un avión no tripulado - comando commander land , detener la simulación - CTRL + C o shutdown comando
Instalar y ejecutar jMAVSim en Windows
La caja de herramientas PX4 Cygwin apareció en 2018. Esta es la forma más poderosa de compilar / desarrollar PX4 para Windows. Para instalar: descargue y ejecute el archivo de instalación desde Github o Amazon .
Por defecto, la cadena de herramientas se instala en la carpeta C: \ PX4.
En el último paso del instalador, puede marcar la casilla "clonar el repositorio PX4, construir y ejecutar la simulación con jMAVSim" (clonar el repositorio PX4, compilar y ejecutar el simulador jMAVSim).
El entorno de desarrollo se inicia en Cygwin utilizando el archivo run-console.bat en el directorio de instalación (por defecto, C: \ PX4).
Si olvidó marcar la casilla de inicio de jMAVSim durante el proceso de instalación, en Cygwin puede clonar el repositorio y ejecutar el simulador usando los comandos:
git clone --recursive -j8 https://github.com/PX4/Firmware.git cd Firmware make px4_sitl jmavsim
Después de la compilación, la consola PX4 y la ventana del simulador aparecerán en la pantalla:

Todavía no he mostrado cielo y árboles en Windows, en lugar de ellos un fondo negro, como informaron los desarrolladores del simulador .
Los comandos de la consola para controlar el dron son los mismos: despegue - despegue del commander takeoff , aterrizaje - aterrizaje del commander land , detención de la simulación - CTRL + C o shutdown .
Vuelos con el programa QGroundControl Ground Station
El programa QGroundControl le permite configurar completamente drones en las plataformas PX4 o ArduPilot, así como planificar y realizar vuelos autónomos al aire libre a través de GPS.
El código del programa está completamente abierto y funciona en las plataformas Windows, OS X, Linux, iOS y Android. El archivo de instalación para la plataforma deseada se puede descargar en la sección Descargar del sitio web del programa .
Para Windows, descargue y ejecute este archivo .
Después de la instalación y el lanzamiento, si jMAVSim ya se está ejecutando en nuestra computadora, el programa se conectará automáticamente.
Puedes lanzar un dron en vuelo usando el botón Fly-Takeoff y aterrizar - Land. También puede realizar un vuelo virtual sobre puntos GPS:

Programación de vuelo autónomo con mavros
El dron virtual jMAVSim se puede controlar utilizando el protocolo mavlink, que se describe en varios artículos (por ejemplo, 1 , 2 ). Para implementar la comunicación mavlink, utilizaremos el paquete mavros del sistema ROS (sistema operativo del robot) .
Los desarrolladores de PX4 recomiendan usar ROS Kinetic.
El paquete mavros proporciona comunicación a través del protocolo MAVLink entre una computadora que ejecuta ROS (por ejemplo, una máquina virtual con Linux o Raspberry PI) y un controlador de vuelo (real o en un entorno de simulador).
El paquete mavros se instala junto con otros paquetes durante la instalación completa de ROS Kinetic .
El paquete roslaunch inicia el paquete mavros con la conexión al simulador, que indica la dirección IP y el puerto de la computadora en la que se ejecuta el simulador:
roslaunch mavros px4.launch fcu_url:="udp://@192.168.0.22:14557"
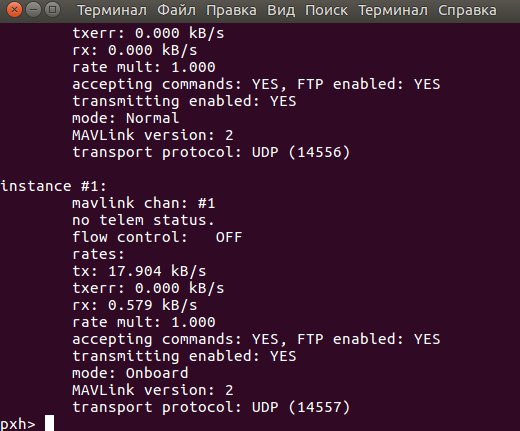
Si el simulador no se está ejecutando en el host donde se está ejecutando jMAVSim, antes de conectarse a mavros, debe habilitar los mensajes de mavlink para que se envíen a través de la red utilizando el param set MAV_BROADCAST 1 en la consola de jMAVSim. Cuando se ejecuta el comando, se muestra la dirección IP del host utilizada para el protocolo mavlink. El puerto se puede encontrar usando el mavlink status en la consola del simulador:
El éxito de la conexión al controlador de vuelo debe verificarse con el comando:
rostopic echo /mavros/state
Si la conexión es exitosa, aparecerán los llamados mensajes en la consola. latido del corazón mavlink, aproximadamente una vez por segundo:
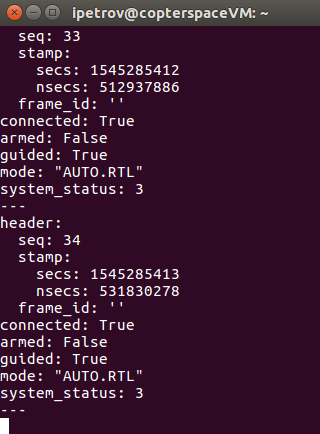
Si los mensajes no aparecen / no están actualizados / campo Conectado = Falso - la comunicación con el controlador de vuelo no está establecida, y debe entender por qué.
Al momento de escribir, en Windows, después del comando param set MAV_BROADCAST 1, los mensajes en la consola jMAVSim comenzaron a aparecer en un bucle:
WARN [mavlink] getting required buffer size failed.
Para que el simulador funcione correctamente en Windows, debe agregar la línea 1029 al archivo src / modules / mavlink / mavlink_main.cpp:
#if defined(__APPLE__) && defined(__MACH__) || defined(__CYGWIN__)
Y recompile / reinicie el simulador con el comando make px4_sitl jmavsim .
Este problema se ha informado a los desarrolladores , se puede solucionar en futuras versiones.
Después de una conexión exitosa, puede iniciar el dron en vuelo autónomo utilizando los siguientes comandos de la consola del sistema ROS:
Después de ejecutar el último comando, el dron virtual debería despegar y flotar a una altura de 5 metros:

También puedes lanzar un dron usando un código simple de Python:
import rospy from geometry_msgs.msg import PoseStamped from mavros_msgs.srv import CommandBool, SetMode rospy.init_node("offbrd",anonymous=True) rate=rospy.Rate(5) setpoint_pub=rospy.Publisher("/mavros/setpoint_position/local",PoseStamped,queue_size=10) arming_s=rospy.ServiceProxy("/mavros/cmd/arming",CommandBool) set_mode=rospy.ServiceProxy("/mavros/set_mode",SetMode) setpt=PoseStamped() setpt.pose.position.z=5 for i in range (0,10): setpoint_pub.publish(setpt) rate.sleep() set_mode(0,"OFFBOARD") arming_s(True) while (rospy.is_shutdown()==False): setpoint_pub.publish(setpt) rate.sleep()
El código anterior usa una llamada a los mismos servicios ROS que el ejemplo de llamada de línea de comando.
Debe copiar el código en un archivo de texto, por ejemplo, fly_jmavsim.py, y ejecutarlo desde la línea de comandos con el python fly_jmavsim.py .
En el proceso de depuración de este ejemplo, encontré una característica del simulador jMAVSim: necesita un procesador potente para el funcionamiento normal. En la máquina virtual Linux, logró calcular solo 10 FPS y se bloqueó inmediatamente después del despegue. En la computadora portátil, mientras escribía el artículo, también perdía el control / se bloqueaba periódicamente. El poder de la computadora portátil ayudó, porque cuando funciona con una batería, se activa el modo de ahorro de energía, que subestima el rendimiento del procesador, lo que afecta directamente al simulador.
Con base en los ejemplos dados, aquellos que lo deseen pueden desarrollar programas de vuelo autónomos (en un cuadrado, en un círculo, en una trayectoria arbitraria, etc.). Realizar tales ejercicios puede ser útil para prepararse para programar misiones autónomas en un quadrocopter real.
¡Les deseamos todos los vuelos exitosos!
Referencias
Sistema operativo de robot (ROS)
Piloto automático PX4