La idea de hacer un robot tan humano como sea posible surgió antes que los robots mismos: en la obra de Karel Apek RUR (el término también fue inventado por Apek), los robots eran completamente como los humanos. ¿Pero realmente se necesitan robots humanoides? ¿Dónde se usan los androides y por qué son tan tacaños con las emociones? Lo contamos en un nuevo artículo.

Los robots especializados en el ensamblaje de automóviles, la transferencia de bienes y la ejecución de otros programas hacen frente a sus tareas mucho mejor que las personas, pero además de realizar su limitado rango de tareas, tales robots no son buenos. Si necesitamos el robot más versátil, debería sentirse cómodo en el entorno humano y la infraestructura, lo que significa que debe ser como un ser humano: al final, la aspiradora robot no podrá sacar la copa del estante, y el soldador robot no dirá cómo Ve a la biblioteca.
Brillantes personajes robóticos históricos
En 1927, siete años después de escribir la
obra RUR, la American Westinghouse Electric Company presentó al Sr. Herbert Televox, un robot que recibió señales a través del teléfono que activó el programa incorporado en él. Según el creador, Televoks podría encender la estufa o verificar si la luz funciona en la casa. En cierto modo, Televox no era solo un robot, sino un componente de una casa inteligente. El antropomorfismo en Televox era solo una decoración inútil.
 Uno de los Televox con su creador, Roy Wensley. Fuente: Acme Telepictures / NEA
Uno de los Televox con su creador, Roy Wensley. Fuente: Acme Telepictures / NEAApareciendo 10 años después en los Estados Unidos, el robot Elektro era de tamaño humano y podía realizar 26 acciones diferentes, incluyendo caminar. Estaba controlado por voz, pero no respondía a las palabras, sino a su número: dos palabras separadas que se escuchaban incluían movimiento, tres significaban detener, cuatro las palabras pronunciadas devolvían a Elektro a su posición inicial. Un motor separado en la boca ayudó al robot a inflar globos y ... fumar. Desde entonces, los robots humanoides han conservado en gran medida una orientación entretenida.
 Elektro robot y su perro robótico Sparko. Fuente: Daderot / Wikimedia
Elektro robot y su perro robótico Sparko. Fuente: Daderot / WikimediaFue solo en 1970 en Japón que la Universidad Waseda creó el WABOT-1, el primer robot humanoide capaz de transportar cargas. Sabía comunicarse en japonés, calcular distancias, elegir la dirección del movimiento y llevar objetos en sus manos.
 WABOT-1 es el primer robot humanoide en ser útil. Fuente: Universidad de Waseda
WABOT-1 es el primer robot humanoide en ser útil. Fuente: Universidad de WasedaRobots modernos y qué les pasa
Han pasado 90 años desde la aparición del Sr. Televox. La tecnología durante este tiempo hizo un gran avance, y los robots humanoides fueron y siguen siendo un dispositivo de entretenimiento o información con un alcance muy limitado.
Uno de los robots más famosos de los últimos años se ha convertido en Sophia de Hanson Robotics. Puede expresar hasta 60 emociones, reconocer el habla y generar respuestas basadas en su propia experiencia y datos de Internet. Sofía es solo un desarrollo de demostración, que es útil como un proyecto promocional; según los expertos, mientras que Sofía es un bot de chat ordinario con expresiones faciales muy específicas, Sofía no sabe nada realmente útil.
 Sophia es un robot muy emocional, pero la tapa transparente en la parte posterior de la cabeza da un poco de miedo. Fuente: Unión Internacional de Telecomunicaciones.
Sophia es un robot muy emocional, pero la tapa transparente en la parte posterior de la cabeza da un poco de miedo. Fuente: Unión Internacional de Telecomunicaciones.Otro consultor de robots, Aiko Chihira, creado por Toshiba, tiene una apariencia más tradicional y un conjunto más pequeño pero más realista de expresiones faciales. Aiko se presentó en 2014 e inmediatamente causó sensación, y seis meses después incluso trabajó como consultora en un centro comercial en Tokio durante un par de días. Chihira mueve sus ojos, cabeza y manos, 43 mecanismos motores están involucrados en él, el robot reconoce la voz y responde con señales en japonés o inglés bien planteados.
El robot Aiko Chihira de Toshiba habla sobre sí mismo en CEATEC 2014En Toshiba, Aiko se llama un robot de comunicación. Los desarrolladores esperan utilizar tales roboconsultas en el sector de servicios, así como en medicina, para monitorear y comunicarse con los pacientes, pero todo esto sucederá en un futuro no muy cercano. Aiko no sabe cómo caminar y ahora solo puede realizar la función de un mostrador de información estacionario.
 Aiko Chihira en su lugar de trabajo temporal en un centro comercial. Fuente: Toshiba
Aiko Chihira en su lugar de trabajo temporal en un centro comercial. Fuente: ToshibaHay muchos otros robots humanoides, menos conocidos, pero no menos interesantes: Actroid-SIT mira a los ojos durante una conversación y puede tocar al interlocutor, y Harmony se convirtió en el primer robot íntimo capaz de apoyar una conversación sobre temas traviesos. Pero en el nivel actual de desarrollo tecnológico, todos ellos son interlocutores estacionarios caros y nada más. Los científicos sueñan con robots de rescate que acumulen escombros, robots de investigación que trabajan con herramientas en condiciones extremas, robots asistentes que repiten el trabajo manual de las personas.
El robot antropomórfico universal es un conjunto muy complejo de sistema musculoesquelético, extremidades mecánicas, sistema de reconocimiento de voz, espacio y redes neuronales que pueden procesar y comprender el entorno y los comandos de voz. Por separado, se han logrado ciertos éxitos en estas áreas.
Entonces, los robots modernos pueden mantener una conversación a nivel de asistentes de voz como Siri, pero hasta ahora la
conversación entre la máquina y la persona está lejos del diálogo de dos personas.
La postura erguida en dos piernas también ha dado un gran salto en los últimos treinta años: vale la pena comparar al menos los movimientos pausados del Honda E0 y la carrera Atlas. Sin embargo, para garantizar dicha movilidad, Atlas recibió 80 kg de equipo y una altura de aproximadamente 180 cm. ¿Qué puede hacer este, quizás, el robot más impresionante de nuestro tiempo? Por ahora, solo lleve
cajas de cinco kilogramos . Por cierto, eche un vistazo más de cerca a la cabeza del robot: allí el lidar gira, escaneando el espacio circundante y componiendo un mapa tridimensional del mundo a su alrededor. Esto permite que el robot reaccione a los obstáculos con la mayor precisión posible, es decir, evitarlos o pasar por encima de ellos. Hablamos sobre el trabajo de los lidares en nuestro material sobre
vehículos no tripulados .
 Entonces SpotMini ve el mundo con el lidar compacto Velodyne VLP-16 Fuente: fotograma del video de Boston Dynamics
Entonces SpotMini ve el mundo con el lidar compacto Velodyne VLP-16 Fuente: fotograma del video de Boston DynamicsLa mayor dificultad es el cerebro del robot. Las máquinas pueden responder adecuadamente a las personas y los muebles, evitar peligros, hablar y comprender más o menos lo que quieren de ellos. Pero el nivel de independencia en los robots humanoides modernos está en algún lugar al nivel de un niño de dos años: se dará cuenta de tomar un cubo o abrir la puerta, pero el robot no es capaz de cosas más complejas que no están previstas por un programa claro. Pasarán muchos años antes de que el robot pueda recoger una herramienta de construcción ordinaria y sin ninguna ayuda externa para construir un cobertizo simple.
Si combinamos los componentes más modernos para crear un robot antropomórfico, el resultado será una criatura no muy inteligente, no tan inteligente y no tan útil con un precio de espacio. Por ejemplo, cada Honda Asimo, un pequeño robot que puede subir las escaleras y patear la pelota, cuesta un millón de dólares y puede arrendarlo por $ 150 mil al mes. La conclusión, desafortunadamente, es muy prosaica: los robots humanoides modernos siguen siendo máquinas especializadas (a la consulta del robot). Crear un robot verdaderamente universal no permite la tecnología y el aspecto financiero.
El "valle siniestro" de los robots
Los elementos de apariencia humana, es decir, piel, ojos, cabello, no son necesarios para el robot, no son más que una decoración para aumentar el atractivo del mecanismo. La mayoría de los robots antropomórficos son esqueletos desnudos (ver casos del ruso Fedor, Atlas de Boston Dynamics, Honda Asimo). Una construcción de marco sin piel simplifica el acceso a los componentes, facilita el desarrollo al eliminar las expresiones faciales y elimina el posible problema del
valle siniestro .
Este término se refiere al efecto en el que los objetos que se ven y actúan como personas disgustan a los observadores, porque no son suficientes como ellos. El nombre del efecto proviene de una falla en el gráfico presentado en un estudio realizado por el científico japonés Masahiro Mori. Realizó una encuesta en 1978, que mostró que en cierto momento la similitud de un robot con una persona ya no atrae, sino que repele. Todavía no hay una explicación generalmente aceptada para este mecanismo psicológico. Se supone que una persona, sin saberlo, nota las desviaciones externas de otras personas de alguna normalidad familiar.
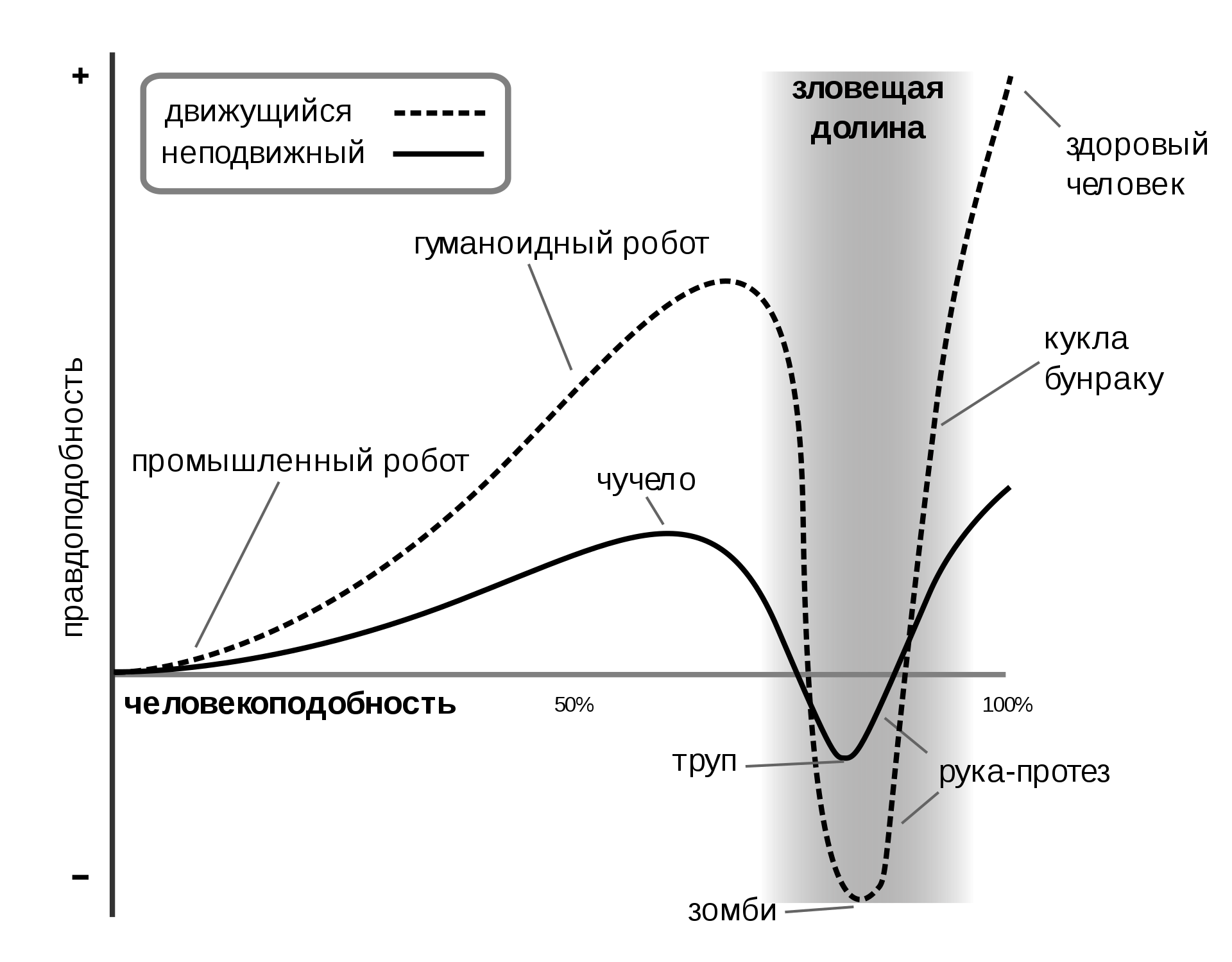 Un gráfico del estudio de Masahiro Mori que refleja la simpatía de una persona por los objetos hechos por el hombre, dependiendo de su similitud con las personas. Fuente: Wikimedia
Un gráfico del estudio de Masahiro Mori que refleja la simpatía de una persona por los objetos hechos por el hombre, dependiendo de su similitud con las personas. Fuente: WikimediaEn cierto nivel de realismo de objetos, el cerebro humano piensa que una persona viva está frente a él. Pero luego vemos movimientos antinaturales de las manos, expresiones faciales "muertas" y una voz inhumana, que causa disonancia cognitiva, expresada en miedo y hostilidad. El robot crea la ilusión de una persona, y subconscientemente dejamos de entender lo que está frente a nosotros, y sentimos una amenaza al respecto.
Los robots antropomórficos han existido durante mucho tiempo, y ahora son más que nunca como los humanos. Exteriormente Funcionalmente, cualquier androide pierde ante cualquier robot y persona especializada: a pesar de la considerable historia de la robótica, el sueño de un asistente universal sigue siendo un sueño.
Y finalmente, un momento de humor: una reunión entre Will Smith y el robot Sofía. Con los robots, el método de enganche funciona más o menos.