En 2017, los medios de comunicación escucharon una historia muy interesante sobre una startup que robotiza vacas lecheras en granjas lecheras industriales. La compañía se llama R-SEPT, y en ese entonces recibió 10 millones de rublos de inversión. Pero ha pasado un año y todavía no hay noticias sobre lo que sucedió más adelante. Contactamos a Aleksey Khakhunov (AlexeiHahunov), el fundador de la startup, y discutimos el desarrollo. Resulta que todo el año su equipo estaba poniendo en forma el prototipo del robot, y hace apenas una semana realizaron su primera prueba de campo en la granja.
Debajo del corte hay una historia sobre un estudiante de robótica que creció en la granja de sus padres, convirtió el diploma universitario en una startup industrial, ya que reunió a los primeros manipuladores con sus amigos y luego escaló al nivel de los programas estatales para el robotización de la agricultura. Y lo más importante es cómo la mano de hierro del robot y la visión artificial son mejores que una lechera viva.
 Alexei Khakhunov
Alexei KhakhunovEsta semana suministramos el robot a la granja y ordeñamos la primera vaca. Todo salió bastante divertido. Nuestra familia tiene una empresa láctea donde solía trabajar. Se encuentra en el distrito Sergiev Posad, el pueblo de Kuzmino. Tenemos mil quinientas vacas allí. Esta es una gran empresa.
Tengo un título en robótica. Naturalmente, estaba ansioso por usar mi conocimiento teórico en acción. Estudié la situación de la robótica en el campo de la ganadería lechera y llegué a una conclusión interesante. Todos los robots existentes, y ahora hay tres fabricantes principales, se crearon en Europa, y los mercados de América o Rusia son muy diferentes. En Europa, las pequeñas granjas familiares de hasta 200 vacas están bastante extendidas. En Rusia, China y América, las granjas son muy grandes. Tenemos una empresa donde hay alrededor de 50 mil vacas. Al mismo tiempo, en Europa, el 40% de las granjas están robotizadas, y en otros mercados, la robotización no supera el 1%. Y el problema es que los robots que se hicieron para pequeñas granjas no están adaptados en absoluto a las realidades de las grandes granjas.
En Europa, el granjero ordeña, alimenta al ganado, hace todo. La vaca debe ser ordeñada por primera vez a las cinco o seis de la mañana. Este es un proceso complicado, es realmente complicado. Para aliviar el dolor del agricultor, idearon un robot que ayuda a sobrellevarlo, pero económicamente no brinda ningún beneficio. Simplemente le hace la vida más fácil al granjero. Y las grandes empresas los necesitan para obtener ganancias. El costo del robot, el rendimiento, la mantenibilidad y otras cosas deben cumplir con una gran cantidad de estándares industriales.
Casi todos los robots existentes fueron inventados por los veterinarios. Sabían muy bien cómo trabajar con una vaca, pero muchos de sus diseños no eran perfectos, resultaron redundantes y tenían muchas deficiencias obvias.
Decidimos crear un robot de diseño industrial, que costará menos que los existentes, pero será la última tecnología en el campo de la robótica, y se tendrá en cuenta toda la experiencia de trabajar con vacas. Por lo tanto, queda un objetivo por implementar.
Robot para ordeño

Según las prácticas modernas en las granjas, las vacas no tienen un cierto lugar fijo: es solo que cien o doscientas vacas caminan por el patio, pueden acostarse en cualquier puesto, comer en cualquier momento. El robot se pone en el mismo ciclo, y la vaca llega allí misma.
La dieta de la vaca consiste en una gran cantidad de componentes. Pero la alimentación es la más agradable para una vaca. Es como la dulzura para un hombre. Para llevar una vaca a un robot, no la alimentan a la hora habitual, eso es lo que hace un robot, y la vaca viene a comer allí. Hasta que comenzamos a hacerlo, no estaban motivados para venir a ordeñar. Estaban estresados por eso.
El robot es esencialmente un puesto cerrado único. Tiene dos puertas. Uno se abre cuando sale la vaca, el otro deja entrar a la próxima vaca y se cierra.

Hay un mito que a la gente le gusta decir: supuestamente, a la vaca le encanta que las lecheras la ordeñen. Ser acariciado, amado, y solo de esa manera dará mucha leche. De hecho, es una mierda absoluta. Lo único que ama a una vaca es la falta de estrés y la repetibilidad absoluta. Si la vaca se alimenta con la misma ración todos los días, se ordeña a la misma hora, se le da la misma cantidad de agua, y preferiblemente se mantiene la misma temperatura, y no hay ruido fuerte, entonces la vaca dará la cantidad máxima de leche, porque Se siente cómodo. Tan pronto como aparezca cualquier factor externo, dará menos leche. El truco de los robots es que realizan todas las operaciones de la misma manera.
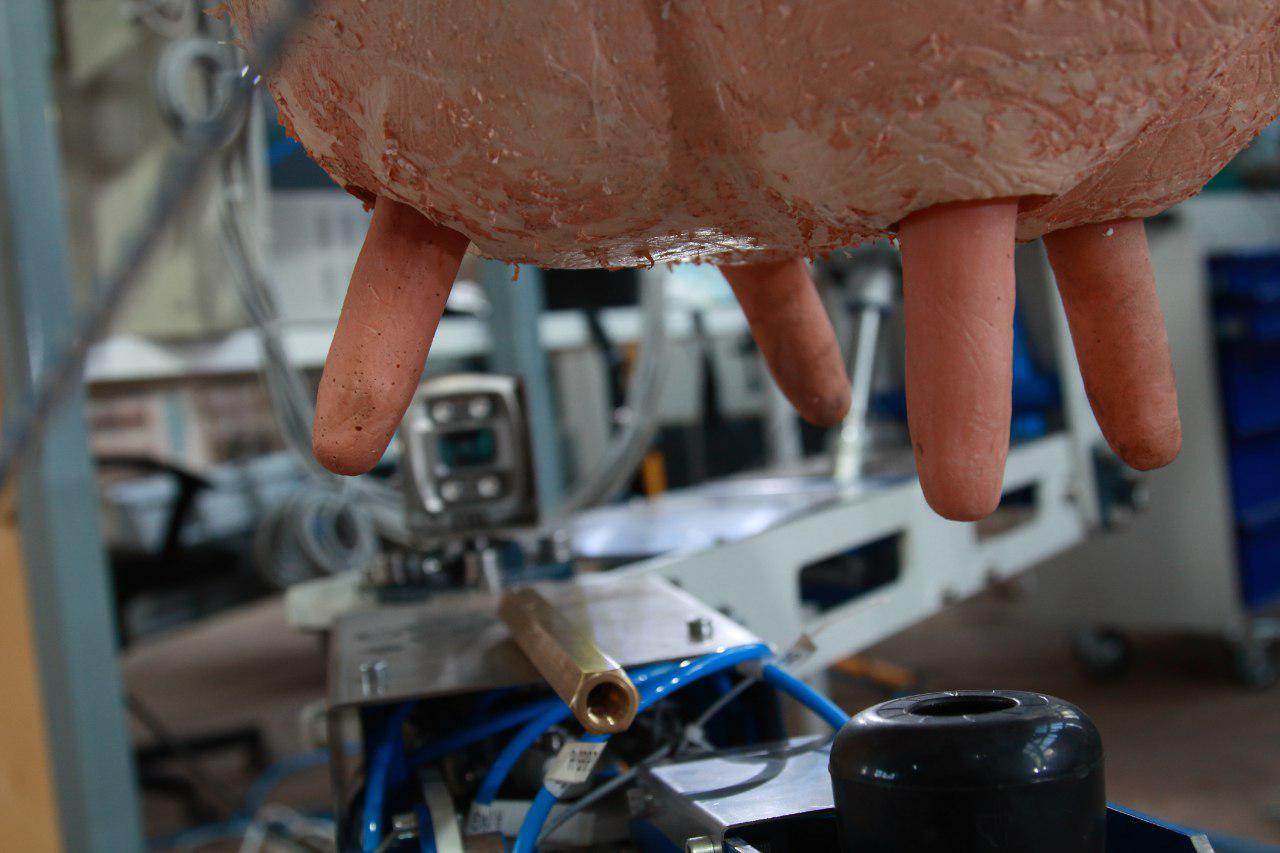
Entra una vaca, luego se le da comida. Se coloca un brazo manipulador debajo de la vaca. Hay una taza de tetina. Primero, se limpia, luego se manejan las primeras rayas para que el proceso hormonal de liberación de leche comience en la vaca. Estas corrientes se analizan: si una vaca tiene alguna enfermedad, si se siente bien. En medio minuto comienza el proceso de ordeño.
La mano toma las copas de las tetinas y las acerca a las ubres. En el interior hay un monitor de frecuencia cardíaca, que con cierta frecuencia enciende y apaga la presión negativa. Y comienza a chupar la leche.
Hay un sensor que verifica la ocupación. Cuando cae el suministro de leche, significa que la vaca ha subido. La copa de la tetina se guarda y se aplica una solución especial a la ubre para "cerrarla". Después del ordeño, el canal de la leche permanece abierto y la infección no debe ingresar. La solución de yodo lo conserva.
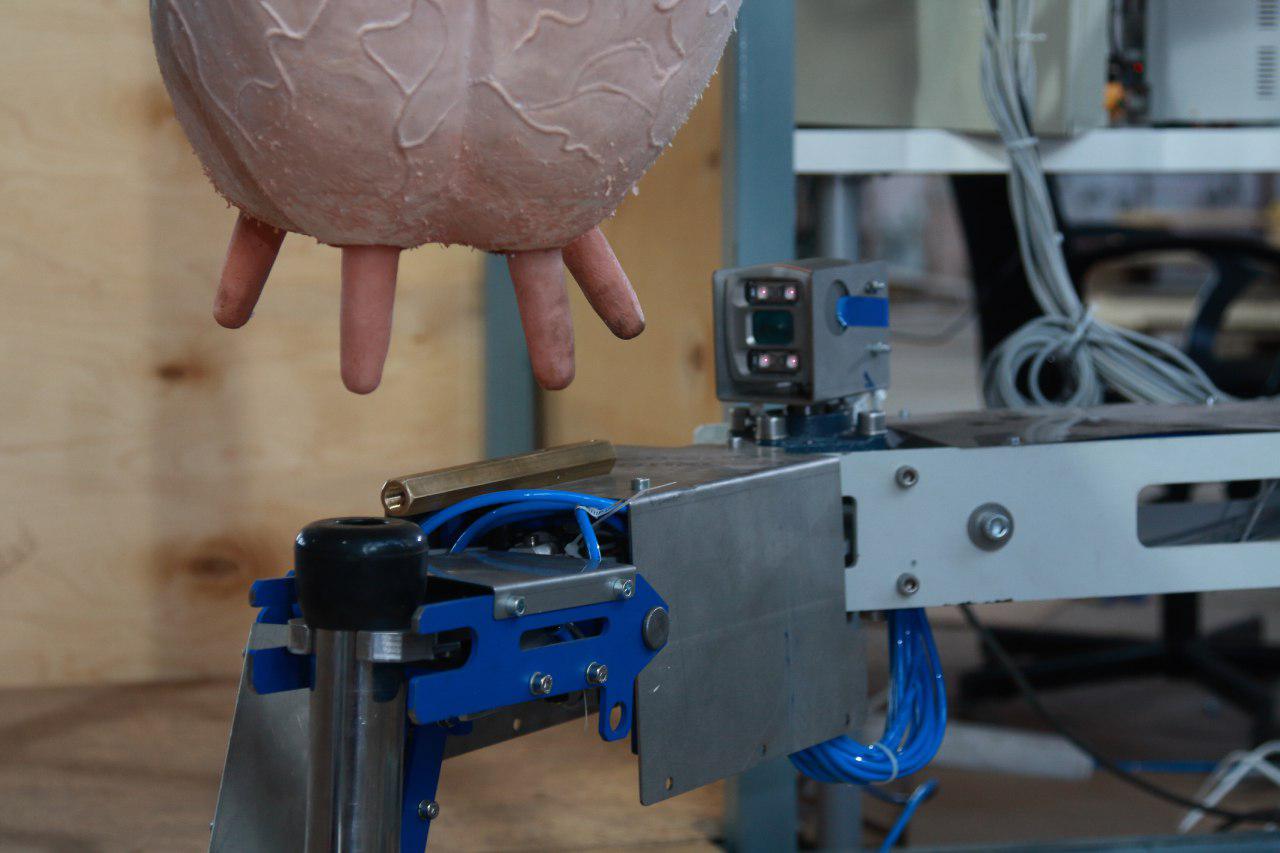
Nadie controla el robot, vive su propia vida. Sabe dónde están las tazas, siempre están en el mismo lugar. Entonces la visión por computadora funciona. El robot tiene una cámara que recibe una imagen tridimensional de alta frecuencia. El algoritmo está buscando en la imagen, dónde están las tetas.
Todas las imágenes están en escala de grises: no hay colores, solo un espectro del negro al blanco. La cámara dispara lo que sucede alrededor de 30 veces por segundo con una resolución bastante baja: 420 a 340. En la primera etapa, simplemente hicimos que las personas marcaran el lugar donde están las tetinas de las ubres en la imagen. Primero, segmentaron el lugar donde estaba toda la tetina, luego, donde se encontraban los puntos más bajos.
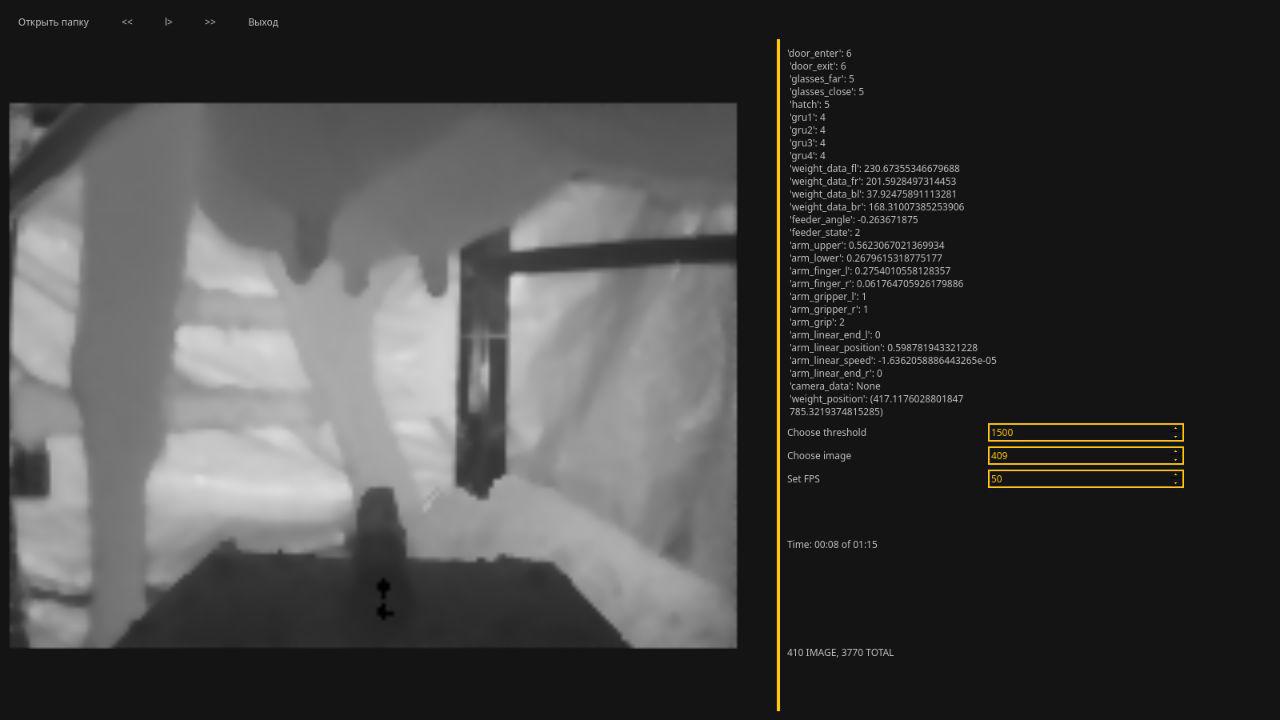
Tuvimos que recopilar muchos datos, tomamos fotos de unos pocos miles de vacas. Al principio, las redes convolucionales se usaban para imágenes "pesadas", pero es muy difícil que las convoluciones aprendan de ellas: necesitaría una gran cantidad de datos. Por lo tanto, se transfirieron a la detección estándar en una imagen plana, tomaron PyTorch como marco.

Historia de desarrollo
Mis padres eran veterinarios y durante mucho tiempo solo trabajaron en la granja colectiva. Primero, mi padre recibió una oferta para convertirse en Director Adjunto de la empresa, y luego para dirigir la empresa en el vecindario, para desarrollarla. En nuestra familia, hay una broma que dice que el agricultor colectivo no es una profesión, sino un estado mental. De marzo a octubre, el trabajo comienza a las cinco de la mañana y no se detiene hasta las nueve de la noche. Es dificil Algo está sucediendo durante todo el día.
La agricultura es una industria ambigua, y no quiere decir que sea fuertemente monetaria. No me veo trabajando en la agricultura. Cuando mi hermano y yo visitábamos diferentes empresas en Europa y analizábamos los robots, siempre me sorprendía su historia sobre las generaciones. Fue especialmente divertido cuando dijeron: "He estado administrando esta empresa durante 13 años después de mi padre. Estamos creciendo muy bien. Teníamos 60 vacas, y luego había 70 de ellas. ¡Progreso! " Cuando mi padre consiguió la empresa en el año 2000, había 100 vacas. Ahora hay 1500 de ellos, y todos tienen dudas sobre si es un crecimiento suficiente.
Estudié en una de las mejores escuelas físicas de la región de Moscú, en el distrito Sergiev-Posad, y definitivamente debería haberme convertido en un técnico. Realmente me gustó la programación. Los principales idiomas en la escuela física eran Pascal y Delphi, y sabía un poco de C ++. Ahora no entiendo cómo, pero logramos hacer muchas cosas interesantes con Pascal. En noveno grado, la maestra nos dijo: "Te prohíbo jugar juegos en clase a menos que los escribas tú mismo". Y escribimos algunos en un año. Primero hicimos nuestra propia "Serpiente", luego "Panzers". Además, puedes jugar en modo multijugador.
Antes de ingresar a la universidad, había escrito varias olimpiadas: MIPT, BMSTU. Podía estudiar en cualquier lugar, solo tenía que elegir. Abrí las listas de todas las especialidades de las universidades, las leí y me aburrí increíblemente. No quería hacer cosas fundamentales, quería algo más orientado a la práctica. La elección recayó gradualmente en Baumanka, en lugar de MIPT o MSU.
La robótica parecía una combinación perfecta cuando creas algo físico, pero puedes escribir un código y ver cómo funciona en el mundo real. Desafortunadamente, tenemos una educación bastante débil en robótica. No funciona a nivel del sistema. Cuando te dan una lista de referencias, ningún libro data del siglo XXI, es muy desmotivador. Nos enseñaron a diseñar, a realizar tareas de mecánica teórica y resistencia de materiales. Y tuvimos que aprender la robótica real por nosotros mismos.
Cuando estábamos haciendo nuestras tesis de posgrado, decidí que escribir una normal era aburrido, y tuve que elegir algo que pudiera usar más tarde. En este punto de nuestro último año, comenzamos nuestro proyecto. Después de que la defensa incluso había reunido un pequeño equipo de amigos. Alguien estaba involucrado en el diseño del circuito, alguien en la programación. Hicimos un equipo de acuerdo a nuestros mayores y comenzamos a hacer la primera versión.

Inspirados por las ideas de los libros, decidimos que definitivamente deberíamos alquilar una casa en algún lugar fuera de Moscú y vivir y trabajar allí todo el verano. ¡Esa fue una idea terrible! Seis tipos que viven en el mismo lugar, no son muy buenos para ver lo que sucede, pero trabajan realmente mucho.
Era un semillero ... de todo a la vez. Recuerdo un momento divertido cuando el vape estaba ganando popularidad. Abres la sala, donde están sentados dos desarrolladores, y no puedes ver nada, ¡nada! Entras y piensas "¿Hay alguna gente aquí?"
Ese verano hicimos los primeros bocetos del manipulador. Hicimos algunos primeros detalles: solo recopilamos los dibujos y los ordenamos en producción. Por supuesto, cometimos un millón de errores: solíamos tener diseñadores muy inexpertos. Ahora hemos encontrado un gran especialista en robótica, y comenzamos a pasar de un grupo de iniciativa de garaje a una compañía cuyo producto cumple con los estándares industriales y los requisitos modernos de la robótica.

Dentro del proyecto, incluso hacemos cosas de muy bajo nivel por nuestra cuenta, porque todo tiene sus propios detalles, y los productos existentes no son adecuados para nosotros. Para ordeñar la vaca, no podemos utilizar los manipuladores industriales estándar de 6 grados existentes. Son redundantes para nuestro diseño y muy caros. Ahora tenemos cuatro grados de libertad. Y es diez veces más barato que cualquier manipulador industrial.
Escribimos todos los circuitos con una programación de bajo nivel, todos los microprocesadores, todos los componentes de construcción y software. No producimos sensores, motores y cosas así.
Robots para alimentación, carruseles y raciones están en aprendizaje automático
Cuando comenzamos a bucear más profundo, nos dimos cuenta de que un robot para ordeñar no puede cubrir todas las necesidades de la granja. Por lo tanto, agregamos dos productos más.
Feedpusher
Cuando dan de comer a las vacas en la granja, las vacas comen a través del titular de la cabeza: hacen estallar sus cabezas hacia donde se dispersa su alimentación. Pero debido a su fisiología, lo empujan constantemente y eventualmente no pueden alcanzarlo, porque el titular de la cabeza limita sus movimientos. Resulta que tienen un metro de comida. Comen 30-40 cm, y otros 60 cm están fuera del alcance.
Por lo general, hay una persona caminando con una pala de nieve y moviendo todo hacia atrás. Pero una persona tiende a olvidar, ser perezosa, hacer mal. Una vaca en este punto comienza a comer menos, lo cual es malo. Por eso se les ocurrió este tipo de robot.
Pero, de nuevo, la mayoría de ellos fueron creados en Europa. Allí, están diseñados para trabajar todos en un patio o en una habitación. En las grandes empresas, hay muchos patios, generalmente de tres a cinco grandes granjas, uno al lado del otro, unidos de diferentes maneras. El alimentador, como una aspiradora, sigue su trayectoria y vuelve a la estación de carga.

Para que esto sea rentable, un robot debe servir varios metros. También es costoso y difícil de inventar e introducir alimentadores especiales. En primer lugar, es costoso volver a equipar la granja, ya que tendrías que hacer reparaciones importantes. En segundo lugar, los patios necesitan mucho espacio libre, al menos para que conduzca un tractor. Por lo tanto, un robot es una solución simple y perfecta.
Robotización de carruseles.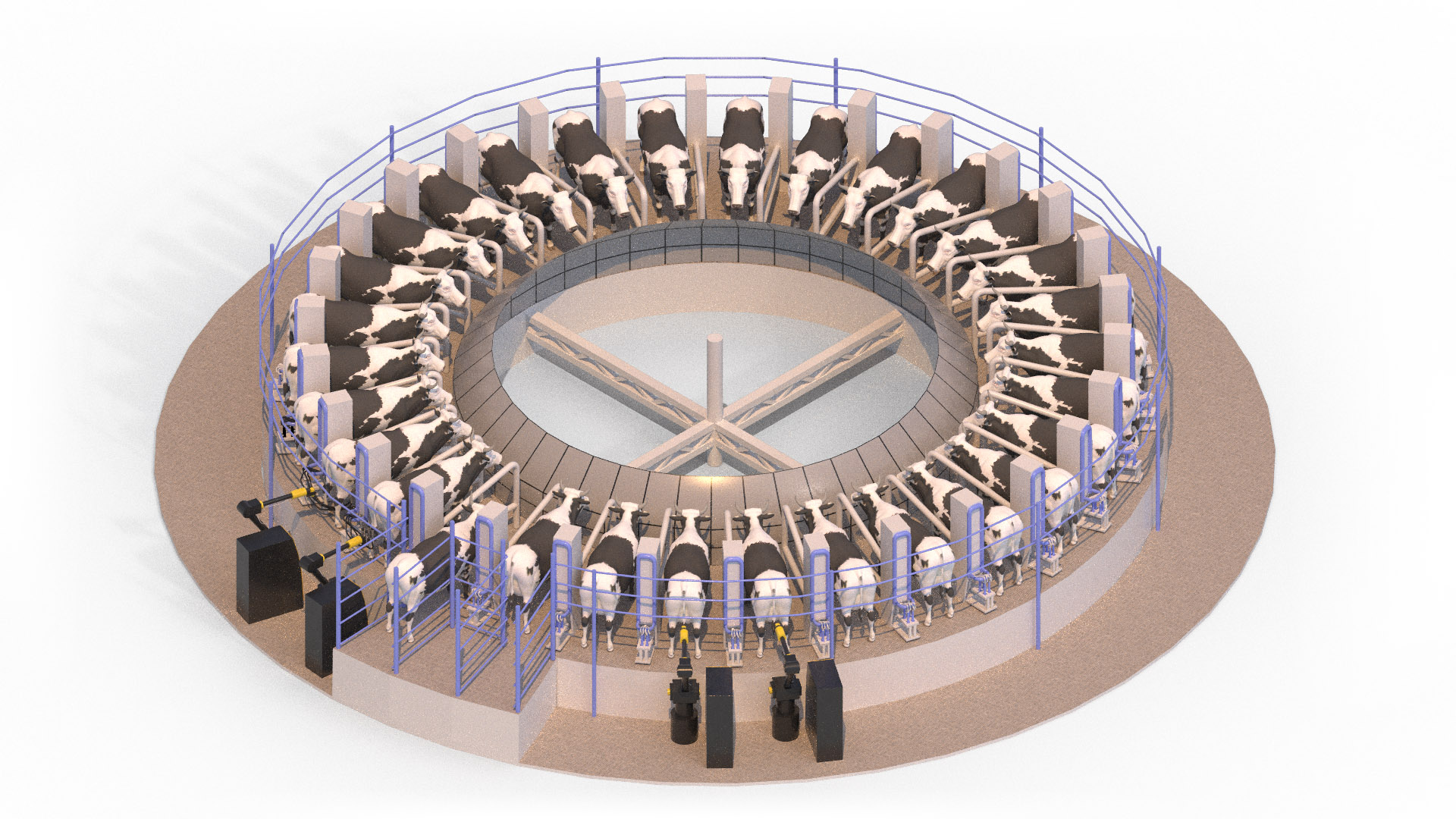
Hay salas de ordeño especiales, generalmente se llaman carruseles. Este es un gran rotor con veinte a cuarenta vacas. Gira lentamente y hay operadores en un círculo. Primero, limpian la ubre, se ponen y quitan los dispositivos. Pero lo hacen muy lentamente, y el carrusel a menudo está inactivo.
Es imposible reemplazar por completo estos carruseles con los robóticos ahora, es muy costoso. Hacemos manipuladores que se pueden instalar en cualquier tipo de carrusel, y esto lo acelerará mucho, aproximadamente en un treinta por ciento. Ya con esta aceleración, puede aumentar considerablemente el ganado y la cantidad de vacas en la granja.
El estudio de la dieta
Hoy en día, están tratando de alimentar a las vacas de acuerdo con la teoría del equilibrio. Cada vaca necesita una cierta cantidad de nutrientes, kilojulios de energía, proteínas y grasas por litro de leche. Pero las características de cada vaca no se tienen en cuenta. Es como alimentar a cada hombre, como un hombre de mediana edad, de seis pies de altura, como si todos tuvieran el mismo metabolismo.
Creamos un sistema que analiza cómo reaccionó la vaca a los diferentes componentes, cuánta leche dio y cuál fue la calidad. En base a esto, seleccionamos la dieta correcta actual para todos los componentes.
Simplemente tomamos la cantidad máxima de datos de entrada sobre cómo se alimentaron las vacas antes, qué valores de energía tenían cada uno de los componentes. Intentamos crear una dieta no para la producción máxima de leche, sino para la rentabilidad máxima de la empresa. Cada componente tiene su propio costo, además sabemos cuánto cuesta un litro y queremos encontrar un equilibrio cuando una vaca da mucha leche, pero su costo es bastante bajo.
Una vaca da hasta 13 mil litros de leche por año. Pero con tal producción de leche, un litro costaría, por ejemplo, 25 rublos. Si hace una dieta de ocho mil quinientos litros, el costo puede ser de unos 12 rublos, y la marginalidad es mucho mayor que en la versión con la maximización de la producción de leche. Se necesita un modelo para encontrar el equilibrio.
Pero existen limitaciones en las pruebas que son fáciles de ignorar. Los componentes no se pueden eliminar o agregar rápidamente para las vacas, ya que producen enzimas en el estómago que son responsables de la descomposición del trigo, por ejemplo. Y los nuevos componentes no se digerirán primero si los introduce bruscamente. Por cierto, funciona de la misma manera para una persona. Cuando comemos la misma comida, la digerimos muy bien.
Las inversiones y la actitud del estado.
En ese momento, tenía mi propio dinero. Primero vivimos de eso. Estos fueron tiempos muy oscuros. A veces era imposible pagar ningún salario. Un tipo tenía un préstamo de auto, y le di 12 mil al comienzo de cada mes, para que pudiera pagarle al banco. Luego logramos atraer dinero, nos convertimos en los finalistas de Statrtup Village en Skolkovo, se hizo más fácil.
Al mismo tiempo, nos convertimos en residentes en Skolkovo, porque intenté pagar un sueldo blanco. Skolkovo dio preferencias fiscales para esto, además esperábamos obtener subvenciones. Pero hay una especie de brecha. Para obtener una subvención para el primer producto en Skolkovo, el producto ya debe tener dinero. Cómo superarlo cuando no tienes dinero, solo un deseo de crear, no está claro.
Ahora, creo que tenemos al menos otros seis meses hasta que comencemos a vender robots y todo se convierta en un negocio que funcione. El término está ligado a los detalles de trabajar con hierro. Tiene un largo ciclo de producción, pruebas, certificación. Pero ahora conocemos todas las principales explotaciones agrícolas, todos los jefes de estas explotaciones agrícolas, y nos mantenemos en contacto con todas ellas. Espero que no haya problemas serios.
Por supuesto, todos son un poco conservadores. Pero en este caso, será mejor que muestres en lugar de contar. Por lo tanto, estamos haciendo el primer patio en nuestro lugar, para poder tomar a alguien de la mano y mostrarlo todo: este es un robot, así es como se ordeña, esta es su economía.
Creemos que hay muchos requisitos previos para unirse a nuestro proyecto. El primero es el apoyo del gobierno. Los robots están subsidiados, tienen contratos de arrendamiento, hay un montón de preferencias fiscales. El gobierno apoya la transición a la agricultura robótica. Hay programas para los cuales el estado hace casi todo, para que pueda comprar robots.
El problema es que la gente no quiere vivir en las aldeas. El pueblo no es un lugar perfecto para vivir, es imposible construir una infraestructura normal allí. La robótica es la salida.
Por supuesto, cuando hay 20 robots en la empresa, se necesitan especialistas para su mantenimiento. La robotización no elimina trabajos, aumenta la eficiencia de la empresa. Por lo general, en lugar de los empleados que se dedicaban al ordeño, hay quienes interactúan con los robots. Hemos elegido varias buenas universidades agrícolas, donde queremos abrir departamentos, que enseñarán a las personas a manejar robots. Significa que venderemos los robots y crearemos empleos para las personas al mismo tiempo.
Mis padres son los escépticos más grandes de todos y el mayor apoyo al mismo tiempo. Antes, cada vez que me preguntaban qué estaba haciendo, eran todas las reuniones y más reuniones: trabajar en los negocios es extraño, en realidad consiste solo en reuniones. Al principio, se estaban burlando de eso. Pero las reuniones se estaban volviendo cada vez más serias. Las personas que conocimos se estaban volviendo más geniales y serias. Y poco a poco el escepticismo se ha ido. Solo había confianza en que todo saldría bien.