Google a publié un rapport de mai sur les tests de robots
Un petit rapport PDF d'une équipe d'ingénieurs travaillant sur un projet de voiture robotique a été publié sur le site Web du projet Google Self-Driving Car . Apparemment, ces documents seront publiés mensuellement. Bien que le présent rapport ne contienne que quelques pages, il décrit en détail les incidents de la route au cours desquels au cours des six dernières années, depuis le début des tests des voitures robotiques du géant de la recherche, ont réussi à y entrer.Tout d'abord, Google clarifie les chiffres: 23 VUS Lexus RX450h qui roulent sur les routes de Californie, principalement à Mountain View, participent au programme. En plus d'eux, il y a 9 autres prototypes dans des décharges fermées. Depuis 2009, les robots ont réussi à parcourir 1 627 591 kilomètres en mode robotique (cela signifie qu'ils ne sont contrôlés que par logiciel et que le conducteur qui se trouve dans l'habitacle ne touche pas le volant). En moyenne, au cours d'une semaine, les autocars ont parcouru 16 000 km sur route ouverte.Pendant six ans, 12 accidents impliquant des véhicules à moteur se sont produits, tous dus à la faute de personnes. L'accident de mai le plus proche est arrivé à Lexus lorsqu'elle s'est arrêtée à un feu rouge à l'intersection de Mountain View. À ce moment-là, une voiture conduite par l'homme a froissé le pare-chocs arrière de Lexus et endommagé ainsi les capteurs qui s'y trouvent. La vitesse du coupable à ce moment n'était que d'environ 1,5 km / h, de sorte que l'accident s'est terminé sans dommages graves.Il est intéressant d'évaluer les situations de circulation difficiles rencontrées par les robots et comment ils ont réussi à s'en sortir: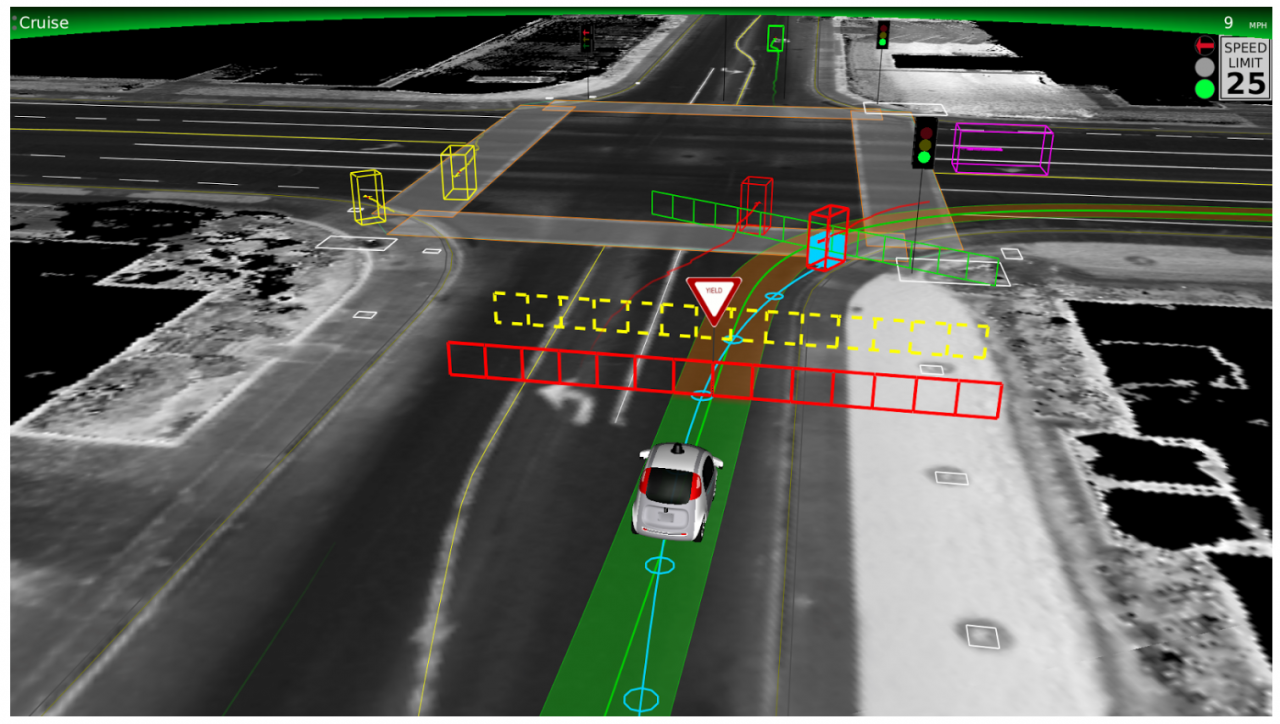 Le diagramme ci-dessus montre le plan de déplacement d'un robocar à l'intersection et de deux motocyclistes, qui sont indiqués par des parallélépipèdes rouges (une ligne rouge brisée est la façon dont ils se déplacent). Robokar s'est arrêté à l'intersection, moment où le motocycliste est parti en ce qui le concerne a franchi l'intersection avec succès et a poursuivi sa route. Mais la moto, tournant à droite vers le robocar, pour une raison inconnue, a conduit dans la circulation venant en sens inverse afin qu'elle soit directement sur la trajectoire de la voiture Google - sa trajectoire calculée est indiquée par une ligne bleue. Le logiciel de la voiture a décidé de s'arrêter et de ne pas avancer, permettant à la moto d'éviter une collision juste à l'intersection. En conséquence, le robocar et la moto se sont ratés en toute sécurité, évitant ainsi des problèmes lors d'un accident. La difficulté supplémentaire était que tout se passait dans le noir,et il serait difficile pour un conducteur humain d'évaluer correctement la situation.
Le diagramme ci-dessus montre le plan de déplacement d'un robocar à l'intersection et de deux motocyclistes, qui sont indiqués par des parallélépipèdes rouges (une ligne rouge brisée est la façon dont ils se déplacent). Robokar s'est arrêté à l'intersection, moment où le motocycliste est parti en ce qui le concerne a franchi l'intersection avec succès et a poursuivi sa route. Mais la moto, tournant à droite vers le robocar, pour une raison inconnue, a conduit dans la circulation venant en sens inverse afin qu'elle soit directement sur la trajectoire de la voiture Google - sa trajectoire calculée est indiquée par une ligne bleue. Le logiciel de la voiture a décidé de s'arrêter et de ne pas avancer, permettant à la moto d'éviter une collision juste à l'intersection. En conséquence, le robocar et la moto se sont ratés en toute sécurité, évitant ainsi des problèmes lors d'un accident. La difficulté supplémentaire était que tout se passait dans le noir,et il serait difficile pour un conducteur humain d'évaluer correctement la situation. Source: https://habr.com/ru/post/fr380391/
All Articles