Comment DRC-HUBO de Corée du Sud remporte le DARPA Robotics Challenge
 Samedi, l' équipe sud-coréenne de l' Institut coréen des sciences et technologies (KAIST) a remporté le DARPA Robotics Challenge (DRC) à Pomona, en Californie, lorsque leur robot, l'humanoïde adaptable DRC-HUBO , a vaincu 22 autres robots de cinq pays différents et a remporté le principal prix en espèces de 2 millions de dollars.
Samedi, l' équipe sud-coréenne de l' Institut coréen des sciences et technologies (KAIST) a remporté le DARPA Robotics Challenge (DRC) à Pomona, en Californie, lorsque leur robot, l'humanoïde adaptable DRC-HUBO , a vaincu 22 autres robots de cinq pays différents et a remporté le principal prix en espèces de 2 millions de dollars. La capacité de passer d'un robot à deux pattes à une voiture sur roues a joué un rôle important dans la réception du prix. De nombreux robots ont perdu l'équilibre et sont tombés au sol, ouvrant la porte ou travaillant avec une perceuse. Mais pas DRC-HUBO . La conception unique lui a permis d'accomplir des tâches plus rapidement et, plus important encore, de rester sur ses pieds (et ses roues).
La capacité de passer d'un robot à deux pattes à une voiture sur roues a joué un rôle important dans la réception du prix. De nombreux robots ont perdu l'équilibre et sont tombés au sol, ouvrant la porte ou travaillant avec une perceuse. Mais pas DRC-HUBO . La conception unique lui a permis d'accomplir des tâches plus rapidement et, plus important encore, de rester sur ses pieds (et ses roues).Le mouvement à deux pattes [pour les robots] n'est pas encore suffisamment stable », a déclaré Rong Ho O, professeur de génie mécanique au principal institut scientifique et technique de Corée, chef d'équipe KAIST. - Si l'un d'entre eux ne fonctionne pas correctement, le résultat peut être catastrophique.
 Il a dit qu'un robot humanoïde avait des avantages lorsqu'il travaillait dans une société humaine, mais il voulait développer une conception qui minimiserait le risque de chutes: «J'ai pensé à beaucoup de choses, et la chose la plus simple était des roues sur mes genoux.DRC-HUBO peut changer de posture, se tenir debout sur deux jambes, marcher, atteindre des objets hauts et se déplacer également dans une position plus stable, sur vos genoux.La DARPA a décidé d'organiser la RDC après l'incident de Fukushima au Japon, dans l'espoir de progresser dans le domaine de la robotique. Vers la compétition RDC Finalsdes équipes développant des robots semi-autonomes ont été invitées, et les opérateurs humains ont dû travailler ensemble pour modéliser les conditions de la catastrophe. Les robots créés par les universités et les entreprises pour la compétition étaient très différents en taille et en forme, parmi eux il y a des robots avec des jambes, des roues, ainsi que des hybrides.
Il a dit qu'un robot humanoïde avait des avantages lorsqu'il travaillait dans une société humaine, mais il voulait développer une conception qui minimiserait le risque de chutes: «J'ai pensé à beaucoup de choses, et la chose la plus simple était des roues sur mes genoux.DRC-HUBO peut changer de posture, se tenir debout sur deux jambes, marcher, atteindre des objets hauts et se déplacer également dans une position plus stable, sur vos genoux.La DARPA a décidé d'organiser la RDC après l'incident de Fukushima au Japon, dans l'espoir de progresser dans le domaine de la robotique. Vers la compétition RDC Finalsdes équipes développant des robots semi-autonomes ont été invitées, et les opérateurs humains ont dû travailler ensemble pour modéliser les conditions de la catastrophe. Les robots créés par les universités et les entreprises pour la compétition étaient très différents en taille et en forme, parmi eux il y a des robots avec des jambes, des roues, ainsi que des hybrides.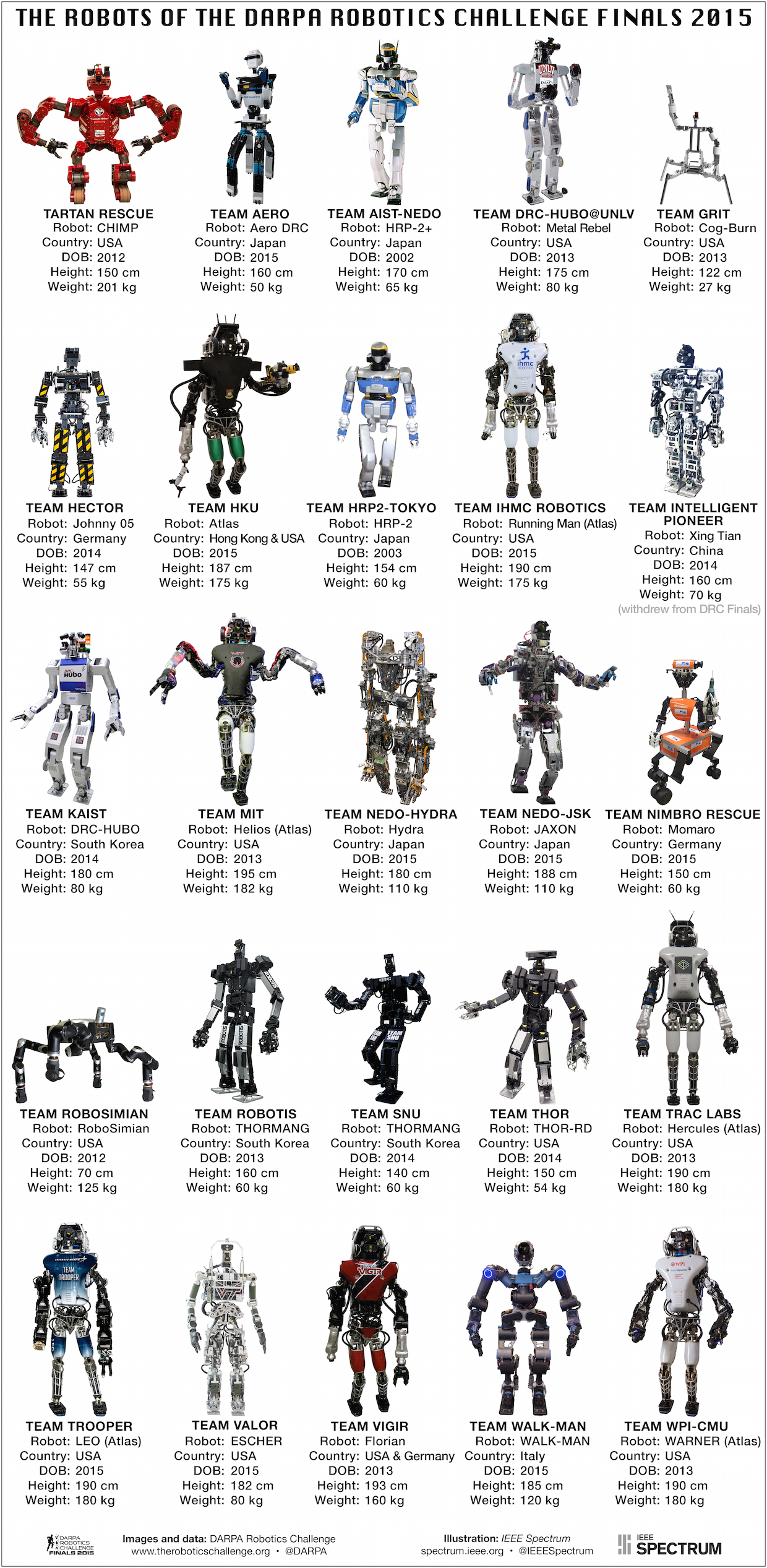 DRC-HUBO est devenu un vainqueur car il a pu accomplir les huit tâches sans erreur dans les plus brefs délais (44 min. 28 s). D'autres équipes ont également bien performé, mais leurs robots ont perdu du temps en raison de retards. Parmi les meilleurs, il y a l'équipe Tartan Rescue , son CHIMP est un robot avec des jambes et des chenilles, qui a pu reprendre ses tâches après la chute; Momarode l'équipe de l'Université de Bonn - une voiture simple et élégante sur roues, avec une tête rotative et deux mains; RoboSimian du Jet Propulsion Laboratory de la NASA, avec quatre jambes et des mouvements de yoga; ATLAS de l'équipe IHMC est un grand robot humanoïde électrique développé par Boston Dynamics .
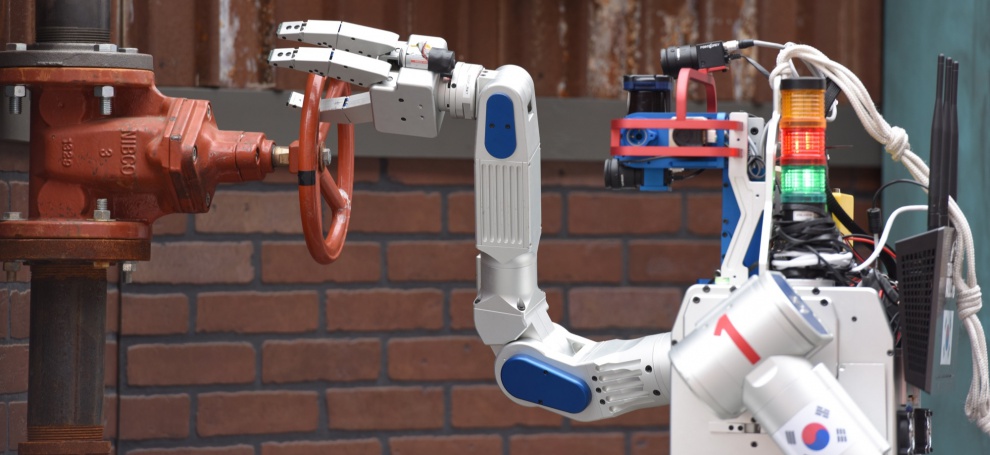
DRC-HUBO est devenu un vainqueur car il a pu accomplir les huit tâches sans erreur dans les plus brefs délais (44 min. 28 s). D'autres équipes ont également bien performé, mais leurs robots ont perdu du temps en raison de retards. Parmi les meilleurs, il y a l'équipe Tartan Rescue , son CHIMP est un robot avec des jambes et des chenilles, qui a pu reprendre ses tâches après la chute; Momarode l'équipe de l'Université de Bonn - une voiture simple et élégante sur roues, avec une tête rotative et deux mains; RoboSimian du Jet Propulsion Laboratory de la NASA, avec quatre jambes et des mouvements de yoga; ATLAS de l'équipe IHMC est un grand robot humanoïde électrique développé par Boston Dynamics .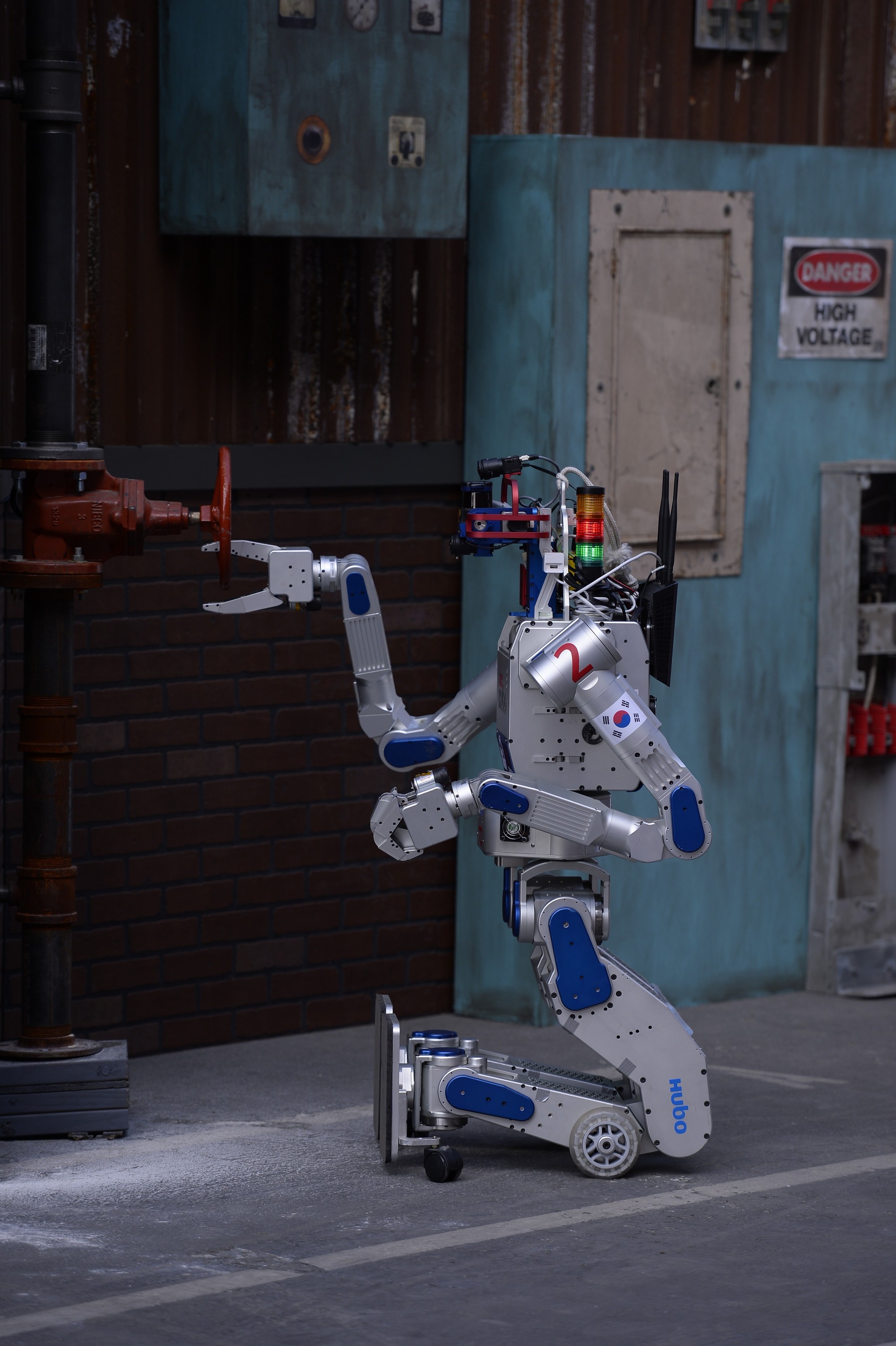 DRC-HUBO effectue la tâche de fermeture de la vanne. Notez que le haut de son corps est tourné de 180 degrés.
DRC-HUBO effectue la tâche de fermeture de la vanne. Notez que le haut de son corps est tourné de 180 degrés.La flexibilité est la chose la plus importante, a déclaré Jill Pratt, directrice de DARPA et organisatrice de la RDC, lors d'une réunion avec des journalistes commentant la conception des robots. "Un robot qui peut changer la configuration de l'utilisation des jambes à l'utilisation des roues peut avoir une structure plus complexe et plus de poids, mais il vous donnera cette flexibilité."
Le professeur O est un expert internationalement reconnu des robots humanoïdes. Lui et ses étudiants KAIST à Daejeon, en Corée du Sud, améliorent leur plateforme HUBO depuis des générations. Ci-dessous une vidéo qui a déjà plusieurs années: alors le professeur O a fait la démonstration de HUBO 2:Pour la finale de la RDC, il a décidé de modifier considérablement le robot pour le préparer à d'éventuelles tâches. Lors de la master class après la compétition, le professeur O a déclaré que le DRC-HUBO "n'est pas différent, c'est juste un robot humanoïde." Mais en fait, son équipe de KAIST a soigneusement étudié chaque détail. Il a estimé le coût de chaque robot à environ 500 000 $ et 1 million de dollars. Voici les principales caractéristiques qui ont aidé DRC-HUBO à faire face aux tâches:1. Roues à genoux: DRC-HUBOa des roues sur les genoux et des rouleaux sur les jambes. Les roues permettent au robot de se déplacer rapidement et régulièrement. Se déplaçant au sol, il utilise des capteurs optiques sur ses tibias pour mesurer la distance à l'aide du flux optique. 2. Moteurs puissants: tout comme SCHAFT - le robot qui a remporté le concours préliminaire DARPA et acquis par Google , DRC-HUBO dispose de moteurs très puissants (il en possède 33, avec 31 degrés de liberté de mouvement). Grâce à des moteurs spécialisés et à un système de refroidissement par air (ventilateurs et pales), le robot peut utiliser une tension de 3 à 4 fois supérieure à celle spécifiée dans les spécifications du moteur, avec une valeur maximale de 30 ampères dans certains cas.3. Compatibilité: l' équipe voulait rendre le robot compatible sans utiliser de capteurs de couple et le contrôleur automatique habituel (ils avaient peur que cela conduise à l'instabilité). Par conséquent, en utilisant un amplificateur spécial, le problème de compatibilité a été transféré au pilote du moteur.
2. Moteurs puissants: tout comme SCHAFT - le robot qui a remporté le concours préliminaire DARPA et acquis par Google , DRC-HUBO dispose de moteurs très puissants (il en possède 33, avec 31 degrés de liberté de mouvement). Grâce à des moteurs spécialisés et à un système de refroidissement par air (ventilateurs et pales), le robot peut utiliser une tension de 3 à 4 fois supérieure à celle spécifiée dans les spécifications du moteur, avec une valeur maximale de 30 ampères dans certains cas.3. Compatibilité: l' équipe voulait rendre le robot compatible sans utiliser de capteurs de couple et le contrôleur automatique habituel (ils avaient peur que cela conduise à l'instabilité). Par conséquent, en utilisant un amplificateur spécial, le problème de compatibilité a été transféré au pilote du moteur.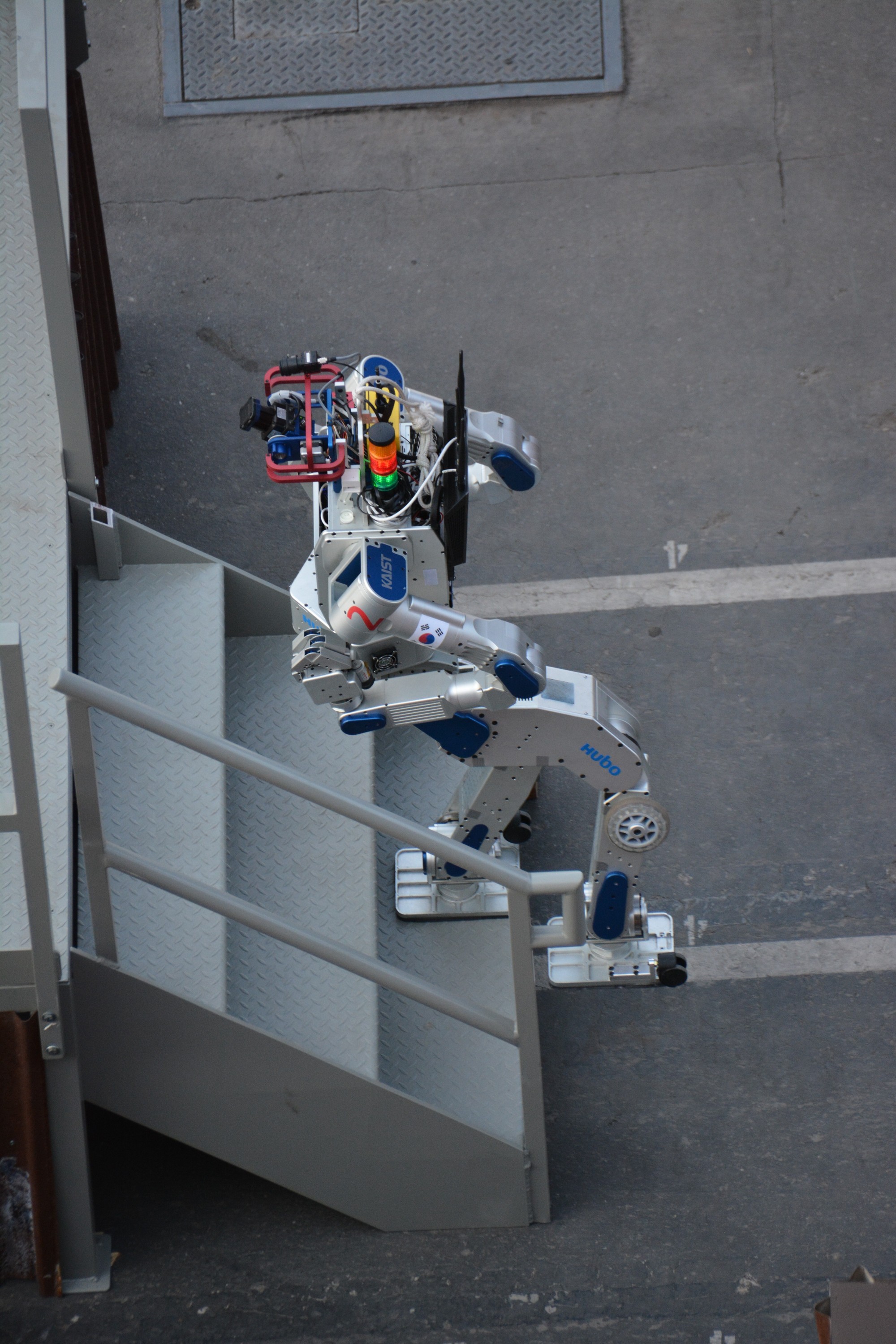 4. Torse rotatif: DRC-HUBO peut faire pivoter le haut de son corps de 180 degrés. Cela signifie que les genoux du robot peuvent être tournés dans une direction, tandis qu'il peut regarder dans la direction opposée (essayez-le vous-même!). Cette capacité fonctionne non seulement lorsqu'elle est debout, mais également lorsqu'elle est à genoux. Le robot a profité de cette opportunité dans plusieurs tâches quand il fallait: conduire un véhicule, perforer un mur, se déplacer dans les décombres et monter les escaliers.5. Bras longs: les membres de l'équipe KAIST ont réalisé que les bras HUBO 2 étaient trop courts pour certaines tâches, ils ont donc fait des bras plus longs, tournant de 7 degrés. Ils ont également caché tous les câbles vers l'intérieur afin de ne pas s'accrocher aux objets environnants. Chaque main peut supporter un poids allant jusqu'à 15 kg, et possède également une «pince adaptable» qui peut saisir des objets durs et mous.
4. Torse rotatif: DRC-HUBO peut faire pivoter le haut de son corps de 180 degrés. Cela signifie que les genoux du robot peuvent être tournés dans une direction, tandis qu'il peut regarder dans la direction opposée (essayez-le vous-même!). Cette capacité fonctionne non seulement lorsqu'elle est debout, mais également lorsqu'elle est à genoux. Le robot a profité de cette opportunité dans plusieurs tâches quand il fallait: conduire un véhicule, perforer un mur, se déplacer dans les décombres et monter les escaliers.5. Bras longs: les membres de l'équipe KAIST ont réalisé que les bras HUBO 2 étaient trop courts pour certaines tâches, ils ont donc fait des bras plus longs, tournant de 7 degrés. Ils ont également caché tous les câbles vers l'intérieur afin de ne pas s'accrocher aux objets environnants. Chaque main peut supporter un poids allant jusqu'à 15 kg, et possède également une «pince adaptable» qui peut saisir des objets durs et mous.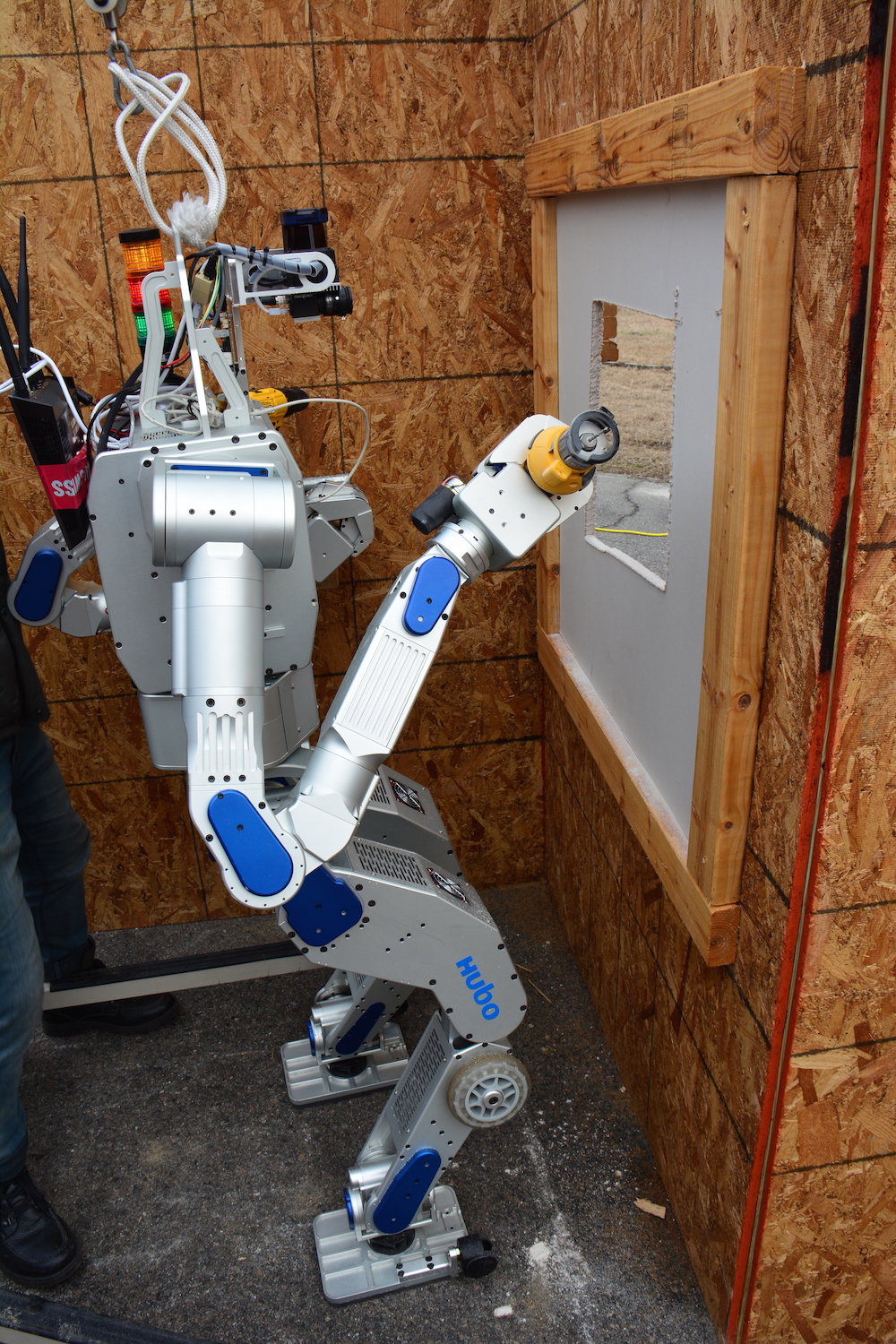 6. Sondage simplifié: au lieu de remplir la tête de capteurs, de caméras stéréoscopiques et de lidars qui scannent constamment l'environnement (cette technologie utilise le robot ATLAS , par exemple), DRC-HUBOa un système de vision simplifié; les opérateurs s'appuient sur une caméra conventionnelle la plupart du temps, et un lidar attaché à un servo variateur analyse l'environnement uniquement lorsque cela est nécessaire. En fait, le robot n'a pas de tête - "seulement des yeux", a noté l'un des étudiants de KAIST .7. Puissance: lorsque les moteurs nécessitent une puissance élevée, le système d'alimentation principal peut ne pas être en mesure de fournir suffisamment d'énergie aux composants importants de la machine. Pour éviter cela, l'équipe a utilisé un supercondensateur, qui fournit de l'énergie aux ordinateurs, aux canaux de transmission et à certains capteurs et gyroscopes, même si le système d'alimentation principal tombe en panne.8. Logiciel spécial: l'équipe utilise Xenomai OS en temps réel pour Linux et un cadre de contrôle de mouvement spécial appelé PODO (développé par KAIST ). Ils tirent également parti de l'environnement de simulation Gazebo. L'équipe a développé son logiciel en mettant l'accent sur une faible bande passante et une communication instable entre les opérateurs et le robot.
6. Sondage simplifié: au lieu de remplir la tête de capteurs, de caméras stéréoscopiques et de lidars qui scannent constamment l'environnement (cette technologie utilise le robot ATLAS , par exemple), DRC-HUBOa un système de vision simplifié; les opérateurs s'appuient sur une caméra conventionnelle la plupart du temps, et un lidar attaché à un servo variateur analyse l'environnement uniquement lorsque cela est nécessaire. En fait, le robot n'a pas de tête - "seulement des yeux", a noté l'un des étudiants de KAIST .7. Puissance: lorsque les moteurs nécessitent une puissance élevée, le système d'alimentation principal peut ne pas être en mesure de fournir suffisamment d'énergie aux composants importants de la machine. Pour éviter cela, l'équipe a utilisé un supercondensateur, qui fournit de l'énergie aux ordinateurs, aux canaux de transmission et à certains capteurs et gyroscopes, même si le système d'alimentation principal tombe en panne.8. Logiciel spécial: l'équipe utilise Xenomai OS en temps réel pour Linux et un cadre de contrôle de mouvement spécial appelé PODO (développé par KAIST ). Ils tirent également parti de l'environnement de simulation Gazebo. L'équipe a développé son logiciel en mettant l'accent sur une faible bande passante et une communication instable entre les opérateurs et le robot. Examinons maintenant de plus près DRC-HUBO et comment il a traversé les huit tâches, ce qui a apporté la victoire à l'équipe KAIST (si vous voulez tout voir en entier, vous pouvez le faire par référence; une version accélérée est ici):
Examinons maintenant de plus près DRC-HUBO et comment il a traversé les huit tâches, ce qui a apporté la victoire à l'équipe KAIST (si vous voulez tout voir en entier, vous pouvez le faire par référence; une version accélérée est ici):1. La tâche de conduire.
Les équipes ont été autorisées à apporter des modifications au véhicule Polaris afin que leurs robots puissent facilement entrer et sortir de la voiture. L'équipe KAIST a installé un dispositif métallique avec deux leviers au bas de la voiture; lorsque le DRC-HUBO a appuyé sur l'un des leviers, le système de câbles a fonctionné de sorte que le deuxième levier appuyait sur l'accélérateur. Avec sa main gauche, le robot s'est accroché à la voiture, et avec sa main droite il a contrôlé la roue. Il a accompli cette tâche très rapidement (le processus a pris un peu plus d'une minute) et, contrairement aux autres équipes, n'a pas cessé de franchir des obstacles.2. La tâche de sortir du véhicule.
Ce fut l'une des tâches les plus difficiles. Se préparant pour lui, professeur Oh, comme il nous l'a dit, il est sorti plusieurs fois de la voiture pour comprendre quels mouvements et quelles parties du corps il utilisait pour cela. Il a conclu qu'une «approche dynamique» serait nécessaire. Son équipe a programmé le DRC-HUBO pour qu'il lève les mains et se tienne sur le châssis de la machine. Le robot utilise 100 Newtons de traction pour chaque main. Lorsque les bras soulèvent le corps du robot, il tombe en grande partie hors de la voiture, bien que le mouvement soit contrôlé (grâce à «l'approche dynamique»). Faites attention à sa merveilleuse manœuvre pour sortir de la voiture vers 1h00! Le professeur O a signalé que pendant le développement de ce mouvement, plusieurs moteurs ont grillé, mais le problème a été résolu en utilisant les moteurs les plus puissants et spécialement conçus. Pour le moment, le robot peut sortir de la voiture en moins de 4 minutes, et lorsqu'il est déjà au sol, il est à genoux et sort.3. La mission avec la porte.
Contrairement à d'autres robots qui devaient se tenir debout (et se tenir en équilibre sur deux jambes) pour terminer cette tâche, le DRC-HUBO pouvait s'agenouiller en tournant la poignée de porte. Il utilise habilement son autre main pour garder la porte ouverte pendant qu'il tourne la poignée de porte. En moins de 2 minutes, il a franchi une porte.4. La tâche avec la valve.
Notez qu'au début de la vidéo, le lidar monte et descend pour permettre aux opérateurs de scanner le terrain devant le robot. Ensuite, lorsque le DRC-HUBO s'approche de la vanne , il fait pivoter le haut du corps de 180 degrés. Faites attention à ses mouvements à 0:20, car vous ne le remarquerez peut-être pas (l'angle de prise de vue ne montre pas la partie inférieure du corps du robot, malheureusement). Dans cette position, toujours à genoux, le robot peut soulever le corps pour qu'il soit plus facile de contrôler la valve (pourquoi rester debout si ce n'est pas nécessaire?). Le robot scanne le terrain à l'aide du lidar, détermine la position et après 3 minutes effectue la tâche. Veuillez noter qu'un seul tour était nécessaire, mais DRC-HUBOfait deux tours complets! À 2 h 01, vous pouvez voir le robot «remettre» le torse dans sa position normale.5. La tâche avec le mur.
C'était une tâche difficile pour la plupart des équipes, car le robot devait tenir la perceuse et appuyer sur le bouton marche / arrêt pour utiliser l'appareil. DRC-HUBO a appliqué des capteurs de force sur chaque bras pour mieux capturer l'instrument. Vous pouvez voir comment le robot se déplace par lui-même et déplace même la perceuse sur l'étagère (renversant une autre perceuse en cours de route) afin de mieux la capturer. Lorsque le robot parvient à saisir l'outil, les opérateurs indiquent l'emplacement de la perforation et le robot fait le reste. Il utilise 20 Newtons de traction électrique, et vous pouvez voir comment il utilise son corps pour déplacer parfaitement la perceuse en cercle. L'achèvement de la tâche prend 11 minutes au robot.6. Le travail surprise.
La tâche consistait à retirer la fiche et à l'insérer dans une autre prise. Remarquez comment DRC-HUBO scanne le sol et remarque que la perceuse qu'il a lâchée plus tôt se trouve sur son chemin. Le robot tourne et pousse l'instrument avec ses genoux. Puis il essaie de se retourner et semble s'écraser contre un mur. Les opérateurs, évidemment, remarquent le problème, il avance un peu et ensuite il peut faire demi-tour. À la fin, le robot s'approche du mur avec une prise installée plus haut que le robinet-vanne et la poignée de porte. Il est temps de vous lever et vous pouvez le regarder vers 15 h 05. DRC-HUBOfait plusieurs pas en avant et après un certain temps commence à terminer la tâche. Il attrape la fiche par le câble; nous pensons qu'il était destiné à ce que les opérateurs puissent mieux voir la prise et que le bras du robot ne l'obscurcisse pas, ce qui rendrait la tâche impossible. À temps, vous pouvez le voir vers 7h47, alors que le robot essaie d'insérer la fiche et manque la prise. Après plusieurs mouvements correctifs, la tâche est terminée! 13 minutes et 30 secondes se sont écoulées - plus que pour terminer toutes les autres tâches.7. La tâche de se déplacer dans les décombres.
Le DRC-HUBO peut déplacer ses genoux vers l'avant ou faire pivoter le torse à 180 degrés et monter ses jambes vers l'avant, agissant comme un bulldozer. Et c'est ce qu'il fait pour terminer la tâche. Vous pouvez voir comment il fait tourner le corps à 0:28. Ça a l'air cool. Le robot lève les mains - probablement pour qu'ils ne s'emmêlent pas dans la poubelle. Ensuite, il commence à se déplacer à travers les décombres. Il ne s'arrête qu'une seconde, quand il semble qu'un morceau de bois est coincé dans un parpaing, alors il se tourne un peu vers la gauche pour le retirer du chemin. Déplace le tuyau en plastique vers la droite. À 4 h 14, il retourne son torse et se tient devant les marches. La tâche prend moins de 5 minutes.8. La tâche avec les étapes.
Le professeur O a déclaré que pour de nombreuses tâches, en particulier pour monter des escaliers, il est important que le robot puisse voir ses jambes. Les gros robots comme ATLAS peuvent difficilement faire cela, ils ont besoin de plier le corps, ce qui rend l'équilibre plus difficile. DRC-HUBOrésout ce problème de manière très intelligente. Il monte les escaliers en arrière! Ainsi, ses genoux ne bloquent pas les caméras et vous pouvez voir les jambes et le sol. Mais comment peut-il voir les jambes s'il monte en arrière? Tourner le torse, bien sûr! Vous pouvez voir l'ensemble du processus, à partir de 0:26. Le robot s'agenouille devant l'escalier, puis lui tourne soudain le dos. Puis il se lève et à 0 h 55, vous verrez comment il tourne le torse à 180 degrés. Maintenant, il peut parcourir les marches et commencer à grimper. Mais notez qu'avant cela il fait deux pas de côté, à gauche (1:45)! Après quelques minutes - ce qui semblait être une éternité pour le public - le robot commence enfin à se lever, brisant les trois dernières étapes l'une après l'autre. Clairement! En moins de 7 minutes DRC-HUBOse tient sur la plate-forme. Il n'y a pas de son sur la vidéo, mais à ce moment, l'équipe et le public ont explosé sous les applaudissements.KAIST a réalisé quatre exemplaires du DRC-HUBO et s'est entraîné sans câbles de sécurité pendant plus d'un mois avant la compétition. Ils se sont entraînés dans la rue, dans un parking avec une surface inégale et dans différentes conditions météorologiques, y compris un fort ensoleillement et du vent. "Si nous ne retirons pas les câbles de sécurité, les opérateurs auront peur", a déclaré le professeur O lors de l'atelier après la compétition.Il a ajouté que pendant l'entraînement, ils effectuaient toutes les tâches dans les deux modes - debout et à genoux (la durée moyenne était de 30 minutes). L'équipe a réussi à nettoyer les décombres avec les mains de DRC-HUBO , ce qu'ils n'ont pas pu démontrer lors des finales en RDC , et ils pouvaient également effectuer des tâches sur une surface plus difficile que celle de la compétition., … ! - , .
Source: https://habr.com/ru/post/fr380589/
All Articles