Les robots peuvent toucher doucement des objets délicats.
 Les manipulateurs saisis par lesingénieurs de fourmis de l'Université des sciences et technologies de l'Iowa ont créé un nouveau type de manipulateurs pour robots qui leur permettront de manipuler avec précision des objets fragiles et petits. De petits tubes ressemblant à des tentacules s'enroulent autour de l'objet souhaité et le maintiennent sans serrer.Le manipulateur classique ressemble à des pinces ou à deux doigts avec lesquels une personne prend des objets. Pour tenir l'élément entre vos doigts, vous devez le presser. Pour éviter d'écraser les étuis fragiles, les ingénieurs inventent différentes ventouses, émulent les pattes de gecko et appliquent d'autres innovations . Mais les ingénieurs américains ont décidé de reprendre les captures de poulpes et autres.Les microtubules ne mesurent que 8 mm de long et environ 0,2 mm de diamètre. Le matériau des tubes est du polydiméthylsiloxane , un polymère transparent.Le principe de fonctionnement des tubes est simple. Ils sont hermétiquement fermés sur un côté, et lorsque l'appareil leur pompe de l'air, ils se redressent et lorsqu'ils sont pompés, ils sont pliés en plusieurs anneaux.La forme spécifique de l'extrémité du tube et l'épaisseur de paroi variable lui permettent de s'enrouler en spirale de manière contrôlée. La forme complexe du tube a été créée grâce à une modélisation informatique préalable. Ce sont les premiers manipulateurs en forme de tentacule qui peuvent se plier de telle manière qu'ils ont réussi à être si petits. Les détails peuvent être trouvés dans la revue scientifique Nature .Ces manipulateurs trouveront une application dans le domaine des robots médicaux. Des poignées douces peuvent être utilisées pendant les opérations pour fixer et déplacer des structures telles que les vaisseaux sanguins ou les tissus mous.Les pattes des araignées ordinaires fonctionnent sur un principe similaire. Les jambes de l'araignée se plient, comme d'habitude, avec les muscles et l'hémolymphe, un fluide spécial qui circule dans toute la cavité du corps de l'arthropode, se plie sous la pression hydrostatique.Les tentacules attirent depuis longtemps les ingénieurs. Une solution similaire avec des tubes pneumatiques flexibles a déjà été démontrée par des scientifiques de la Harvard School of Engineering and Applied Sciences (USA).
Les manipulateurs saisis par lesingénieurs de fourmis de l'Université des sciences et technologies de l'Iowa ont créé un nouveau type de manipulateurs pour robots qui leur permettront de manipuler avec précision des objets fragiles et petits. De petits tubes ressemblant à des tentacules s'enroulent autour de l'objet souhaité et le maintiennent sans serrer.Le manipulateur classique ressemble à des pinces ou à deux doigts avec lesquels une personne prend des objets. Pour tenir l'élément entre vos doigts, vous devez le presser. Pour éviter d'écraser les étuis fragiles, les ingénieurs inventent différentes ventouses, émulent les pattes de gecko et appliquent d'autres innovations . Mais les ingénieurs américains ont décidé de reprendre les captures de poulpes et autres.Les microtubules ne mesurent que 8 mm de long et environ 0,2 mm de diamètre. Le matériau des tubes est du polydiméthylsiloxane , un polymère transparent.Le principe de fonctionnement des tubes est simple. Ils sont hermétiquement fermés sur un côté, et lorsque l'appareil leur pompe de l'air, ils se redressent et lorsqu'ils sont pompés, ils sont pliés en plusieurs anneaux.La forme spécifique de l'extrémité du tube et l'épaisseur de paroi variable lui permettent de s'enrouler en spirale de manière contrôlée. La forme complexe du tube a été créée grâce à une modélisation informatique préalable. Ce sont les premiers manipulateurs en forme de tentacule qui peuvent se plier de telle manière qu'ils ont réussi à être si petits. Les détails peuvent être trouvés dans la revue scientifique Nature .Ces manipulateurs trouveront une application dans le domaine des robots médicaux. Des poignées douces peuvent être utilisées pendant les opérations pour fixer et déplacer des structures telles que les vaisseaux sanguins ou les tissus mous.Les pattes des araignées ordinaires fonctionnent sur un principe similaire. Les jambes de l'araignée se plient, comme d'habitude, avec les muscles et l'hémolymphe, un fluide spécial qui circule dans toute la cavité du corps de l'arthropode, se plie sous la pression hydrostatique.Les tentacules attirent depuis longtemps les ingénieurs. Une solution similaire avec des tubes pneumatiques flexibles a déjà été démontrée par des scientifiques de la Harvard School of Engineering and Applied Sciences (USA).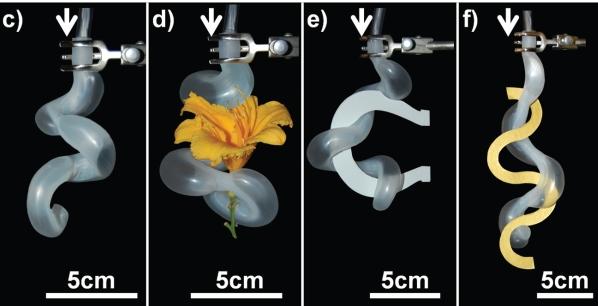 Création d'ingénieurs de Harvard Apartir de solutions inhabituelles, on peut rappeler le concept de la prothèse , dans laquelle le moteur tire et desserre les câbles traversant le tentacule. Ils permettent à la prothèse de s'enrouler progressivement, capturant des objets de petit à assez grand. La prothèse se redresse en raison de l'élasticité interne.
Création d'ingénieurs de Harvard Apartir de solutions inhabituelles, on peut rappeler le concept de la prothèse , dans laquelle le moteur tire et desserre les câbles traversant le tentacule. Ils permettent à la prothèse de s'enrouler progressivement, capturant des objets de petit à assez grand. La prothèse se redresse en raison de l'élasticité interne. Prothèse tentaculaire
Prothèse tentaculaireSource: https://habr.com/ru/post/fr380865/
All Articles