Sauvetage de noyade - le travail des robots
 La robotique moderne est aujourd'hui divisée, en gros, en quatre catégories principales:
La robotique moderne est aujourd'hui divisée, en gros, en quatre catégories principales:- robots industriels, stationnaires ou se déplaçant dans les locaux,
- robots ménagers (jusqu'ici principalement représentés par les aspirateurs),
- robots militaires
- et des robots pour le divertissement.
Bien sûr, cette division est très conditionnelle. Mais toutes les autres catégories sont encore à des degrés divers d'embryon. L'utilisation de robots a un grand potentiel dans de nombreux domaines d'activité. Mais l'introduction active d'assistants mécaniques est toujours limitée par un certain nombre de facteurs, et principalement des difficultés scientifiques et techniques. Dans le même temps, l'un des domaines les plus prometteurs pour la robotique est le sauvetage des personnes dans les zones d'accidents technologiques majeurs et de catastrophes naturelles. Ce sujet devient de plus en plus pertinent au fil des ans.L'idée même de robots de sauvetage, comme les robots soldats, n'est absolument pas nouvelle. Et l'obstacle principal ici ne devient pas tant technique que la complexité algorithmique. Il n'est pas facile pour les gens de trouver des survivants, mais comment enseigner cela aux robots? Bien entendu, cette tâche ne peut pas encore leur être entièrement attribuée. Mais néanmoins, les robots peuvent déjà être utilisés pour résoudre certains problèmes lors des opérations de recherche et de sauvetage, et ils peuvent le faire plus rapidement et plus efficacement que les humains.avalanche
Dans cette situation, le temps est un facteur critique. Il n'y a pas plus de 15 minutes pour sauver les personnes couvertes de neige, jusqu'à ce qu'elles meurent d'asphyxie. Pendant ce temps, vous devez trouver des survivants sur une immense zone recouverte d'une couche de neige instable, ce qui représente un danger pour les sauveteurs eux-mêmes. Maintenant, les grimpeurs emportent déjà des balises individuelles avec eux, et les signaux des téléphones portables sont également utilisés. Mais cela ne permet toujours pas une recherche assez rapide.L'une des tentatives pour résoudre ce problème a été la création du projet Sherpa , dans le cadre duquel une «plateforme robotique» pour les opérations de recherche et de sauvetage en montagne est en cours de création. Il s'agit d'un système composé de trois types de robots radiocommandés:- , . .
- -, , , , . .
- , -. , . .
En outre, un conteneur spécial est utilisé pour transporter des fournitures, de l'équipement et des drones, qui fonctionne également comme chargeur. La plate-forme Sherpa s'avère assez universelle, elle peut être utilisée non seulement lors de la recherche d'avalanches.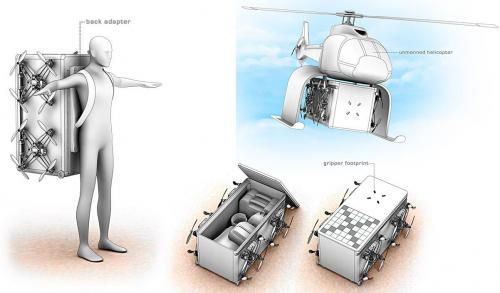
Inonder
Dans ce cas, la tâche des robots est de rechercher des survivants sur un très grand territoire et de leur fournir les fournitures nécessaires à leur survie jusqu'à l'arrivée des sauveteurs. Une solution est proposée par le projet Cooperative Robotic Watercraft de l'Université Carnegie Mellon . Cela implique l'utilisation de petits groupes de petits robots planeurs qui explorent conjointement les carrés donnés, rapportent les trouvailles et livrent de petites charges.Les développeurs ont créé plusieurs options de conception pour des robots en plastique relativement bon marché équipés d'hélices. Pour la communication, ils utilisent des téléphones portables ordinaires sur Android, l'orientation se fait à l'aide du GPS. Les robots sont également équipés d'une caméra, d'un Arduino et de capteurs, dont un système d'échantillonnage de l'eau.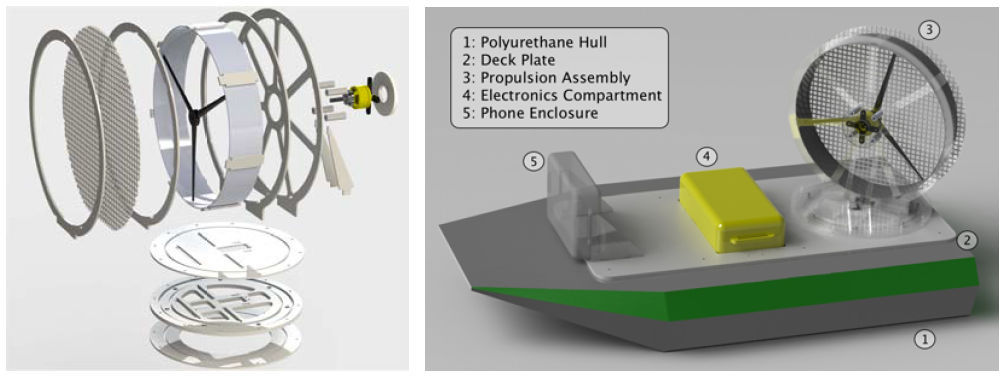
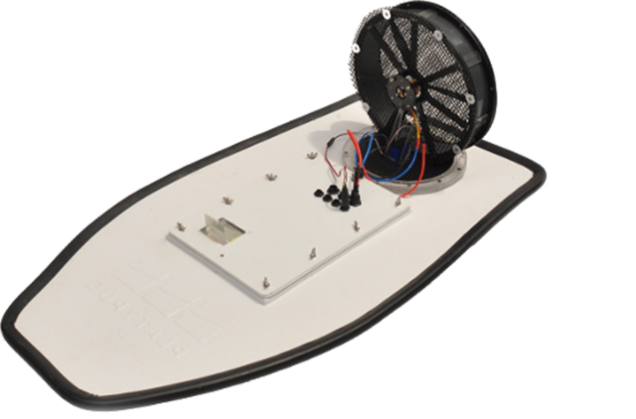 La longueur minimale du bateau est de 0,6 m, mais la conception permet de passer à des structures assez grandes de plusieurs mètres de long, équipées d'un équipement sérieux, jusqu'au sonar et aux spectromètres de masse. Selon les développeurs, pour une recherche à part entière, un robot ne devrait pas avoir plus de 16 000 mètres carrés. m de surface d'eau (1,6 ha). Naturellement, l'augmentation du nombre de robots par unité de surface accélère la recherche et améliore l'efficacité.
La longueur minimale du bateau est de 0,6 m, mais la conception permet de passer à des structures assez grandes de plusieurs mètres de long, équipées d'un équipement sérieux, jusqu'au sonar et aux spectromètres de masse. Selon les développeurs, pour une recherche à part entière, un robot ne devrait pas avoir plus de 16 000 mètres carrés. m de surface d'eau (1,6 ha). Naturellement, l'augmentation du nombre de robots par unité de surface accélère la recherche et améliore l'efficacité.Tremblement de terre
La destruction du bâtiment ne signifie pas qu'il n'y a personne à sauver dans les ruines. Cependant, ici le facteur temps est très important. Pour compiler une carte de blocage et détecter d'éventuels points de pénétration, les développeurs de l'Université Ryerson ont équipé le multicoptère d'une caméra RGB-D capable non seulement d'enregistrer une image, mais aussi de déterminer la distance aux objets. Une solution similaire, en particulier, a été utilisée dans Microsoft Kinect. Le système analyse les images de deux caméras (couleur et profondeur) pour détecter les fissures, les immersions, les ouvertures et les trous à travers lesquels les survivants peuvent être recherchés. Cela prend en compte la taille des trous, la profondeur et les conditions environnementales.Accidents impliquant des rejets toxiques et radioactifs
C'est probablement le domaine le plus développé de la robotique de sauvetage: il existe sur le marché de nombreux modèles de robots conçus pour étudier les débris et les endroits dangereux pour la santé et la vie humaines. Fondamentalement, ce sont de si petites machines qui peuvent être utilisées à la fois pour rechercher des survivants sous les décombres et pour surveiller la radiation et la situation chimique dans la zone de l'accident.Et ce robot Parosha Cheetah plus puissant peut être utilisé pour une variété de tâches, de l'observation et la réparation à la livraison de médicaments, de fournitures et d'évacuation de personnes, car la capacité de charge atteint 110 kg.

 Parmi les nouveaux développements, le robot Octopus de 670 kilogrammes, équipé de huit manipulateurs (d'une capacité de chargement de 180 kg) et utilisé à la centrale nucléaire japonaise de Fukushima, peut être appelé. Entre autres, le robot peut être équipé d'un laser pour couper la pierre et le béton, ainsi que d'une poignée spéciale pour travailler avec des substances radioactives. En général, Octopus est un robot polyvalent, également adapté au sauvetage des survivants des tremblements de terre, des tsunamis et des incendies.
Parmi les nouveaux développements, le robot Octopus de 670 kilogrammes, équipé de huit manipulateurs (d'une capacité de chargement de 180 kg) et utilisé à la centrale nucléaire japonaise de Fukushima, peut être appelé. Entre autres, le robot peut être équipé d'un laser pour couper la pierre et le béton, ainsi que d'une poignée spéciale pour travailler avec des substances radioactives. En général, Octopus est un robot polyvalent, également adapté au sauvetage des survivants des tremblements de terre, des tsunamis et des incendies.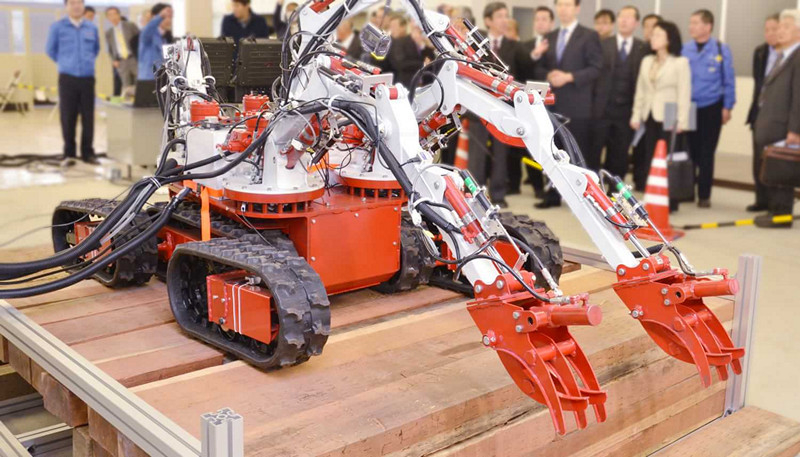 Un autre problème qui empêche l'utilisation répandue de robots dans les opérations de sauvetage est la faible fiabilité des modèles conçus pour une utilisation "civile". Dans le même temps, des robots de sauvetage militaires ou spécialisés très fiables sont très chers. Et peu d'organisations décident d'investir plusieurs dizaines de milliers de dollars dans un appareil qui devient obsolète ou détruit en quelques années.Donc, soit le développement de la robotique de sauvetage ira dans le sens d'une réduction maximale des coûts afin de prendre en quantité, pas en qualité, soit nous devrons attendre longtemps pour la robotique du ministère des Urgences.
Un autre problème qui empêche l'utilisation répandue de robots dans les opérations de sauvetage est la faible fiabilité des modèles conçus pour une utilisation "civile". Dans le même temps, des robots de sauvetage militaires ou spécialisés très fiables sont très chers. Et peu d'organisations décident d'investir plusieurs dizaines de milliers de dollars dans un appareil qui devient obsolète ou détruit en quelques années.Donc, soit le développement de la robotique de sauvetage ira dans le sens d'une réduction maximale des coûts afin de prendre en quantité, pas en qualité, soit nous devrons attendre longtemps pour la robotique du ministère des Urgences.Source: https://habr.com/ru/post/fr382073/
All Articles