Imprimante maison sur la mécanique SCARA
Ce qui était faux
Quel était le problème avec l' imprimante précédente :- Bruit - TV noyée
- Dimensions - 40x30x80 ne peut pas être mis sur la table (ne s'adaptait même pas sur le balcon, plus précisément, mais la bobine avec du plastique ne s'adaptait plus)
- Poids - 8 kg (en partie à cause du Nema23 et des panneaux de meubles lourds)
Ce que je voulais
Bruit - éliminez le bruit au minimum (idéalement, seul le son des vers de terre en mode 32 micropas). Les guides linéaires et les paliers linéaires sont l'une des sources de bruit les plus bruyantes de la mécanique delta, dans la nature, ils sont traités avec des guides de rail ou une conception simple avec un profil en aluminium et des paliers lisses recouverts d'une coque (Kossel). Quant à moi, à l'état vertical, les roulements linéaires et les guides linéaires ne fonctionnent pas dans le bon mode.Dimensions - Je veux une imprimante qui tient facilement sur une table avec un désordre créatif. Ensuite - la taille de la zone d'impression ne doit pas être inférieure à 10x10x10 +.Pourquoi ai-je décidé de sacrifier la taille de la zone d'impression - mais parce que pendant une demi-année d'impression presque quotidienne, je n'ai jamais eu besoin d'imprimer plus de 10 x 10. J'ai décidé que cette zone me suffirait et même resterait.De plus, pour réchauffer la zone 10x10, vous avez besoin de 4 fois moins d'énergie de l'alimentation, ce qui vous permet d'utiliser des alimentations externes conventionnelles - je suis entré dans seulement 60 watts (avec une plate-forme chauffée), j'ai 8,5A 12v. Un gros plus est l'alimentation externe, qui se trouve sous la table et ne prend pas de place.Poids - le paramètre précédent vous permet déjà de réduire considérablement le poids, plus un Nema17 raccourci (un moment plus petit, mais ce n'est pas un problème). La complexité structurelle des petites structures est obtenue avec des matériaux de plus en plus légers.La mécanique que j'ai examinée
Portique XYIl ne convenait pas à la taille - une échelle + un chariot sur un axe représente au moins 10 centimètres d'espace, la stabilité structurelle était également mise en doute. Les roulements linéaires doivent être espacés (à mon avis ~ 7-9 centimètres d'espace inutilisé.HBot et CoreXY Lataille est un peu plus petite que dans la version précédente. La stabilité structurelle a également soulevé des doutes, plus la complexité de création de distorsion est ajoutée (pour cette mécanique) c'est très important) et avec une étanchéité uniforme de la ceintureDelta,j'en avais déjà un, mais même sous une forme réduite, je ne l'aimerais pas - trois Nema17 de 71 mm de long (47 + 24) orientés à 60 degrés et la zone de travail de 10x10 cm dépassait clairement 20 centimètres dia être.Bras articuléC'est mon rêve - mais il y a évidemment des difficultés techniques avec geabox sans backlashes - j'ai essayé d'imprimer de nombreux types et j'étais insatisfait de tout le monde - le dernier espoir pour un variateur Harmonic (ce type est utilisé dans les équipements industriels)PolarAussi, des mécaniques intéressantes, ont même fait un peu de travail (en fait pas si purement polaire, sur Internet je suis tombé sur le nom de "bipolaire"), mais je l'ai repoussé pour l'avenir. Principalement dû au fait qu'un mécanicien a été trouvé qui me semblait un peu plus prometteur. Parmi les inconvénients de la polaire - la complexité de la mise à l'échelle, le coût supplémentaire de transmission des signaux à une plate-forme tournante, la complexité structurelle de l'un des "axes".ScaraEt là-dessus je me suis arrêté, ou plutôt sur la version qui porte le nom sur Internet - robot parallèle à 5 bars (bien qu'il soit décrit dans SCARA sur Wikipédia ).Alors tout me convenait:- Poids
- La taille
- Bruit
- Mise à l'échelle - a changé la longueur des leviers et la taille de la plate-forme et nous avons maintenant une grande zone d'impression
- Possibilité d'utiliser des pièces standard aliexpress
- La complexité structurelle semblait réalisable
- Et je voulais quelque chose de futuriste
Développement
Armé d'OpenScad, j'ai commencé le développement.L'ensemble du développement de l' open source et vous pouvez le trouver sur github.com/pavlog/sscara.Ensuite, je vais décrire les points clés de cette mécanique et exprimer mes réflexions sur pourquoi cela a été fait de cette façon ou pourquoi il n'est pas nécessaire de le faire.Boîte de vitessesLa chose la plus importante dans toute imprimante est la précision d'impression. La longueur de levier calculée pour moi était de 150 cm - et cela a donné une longueur de corde de 4,712 mm au rayon maximum (sans micro-pas, pour un pas de 1,8 degrés). Lors de l'utilisation de la micro étape 32 (les pilotes DRV le permettent), le résultat était déjà de 0,147 mm, ce qui en principe ne peut pas être qualifié de suffisant pour une imprimante de loisir (je pense que c'est un maximum de 0,1 mm. De plus, on craignait que la perte de couple de l'étape dans une telle micro étape soit problèmes, il a été décidé que les essieux ne tourneraient pas directement, mais à travers la boîte de vitesses.J'ai essayé un très grand nombre de schémas et de types de toutes sortes - tout ne convenait pas - principalement à cause du jeu, ou des risques d'apparition de jeu à cause de l'usure. Il s'est avéré que le plus simple était le mieux. Et l'option la plus simple était une transmission par courroie. Simple et sans jeu.En choisissant un rapport de démultiplication de 1 à 5 (et 32 micro pas), j'ai obtenu la pire précision de positionnement de 0,029 mm (ce qui est plus que suffisant). Les leviersSCARA peuvent avoir à la fois deux leviers et 4. Il a refusé le circuit bidirectionnel à la fois - suspendre une étape à emporter est la mauvaise décision (dans de telles solutions, des moteurs à rotation constante avec encodeurs sont utilisés, la rigidité n'est clairement pas pour le plastique). Mais le système à quatre bras semblait réalisable et peu complexe.À quoi ressemblait
leviersSCARA peuvent avoir à la fois deux leviers et 4. Il a refusé le circuit bidirectionnel à la fois - suspendre une étape à emporter est la mauvaise décision (dans de telles solutions, des moteurs à rotation constante avec encodeurs sont utilisés, la rigidité n'est clairement pas pour le plastique). Mais le système à quatre bras semblait réalisable et peu complexe.À quoi ressemblait Hot End au début
Hot End au début L'extrudeuse a dû être refaite - la version avec un ressort (deux photos ci-dessus), bien qu'elle ait l'air cool, mais ne fonctionne évidemment pas (il n'y a pas assez de force de serrage), a utilisé le schéma standard.
L'extrudeuse a dû être refaite - la version avec un ressort (deux photos ci-dessus), bien qu'elle ait l'air cool, mais ne fonctionne évidemment pas (il n'y a pas assez de force de serrage), a utilisé le schéma standard. Après avoir assemblé cette conception et procédé aux tests, il est immédiatement devenu clair que l'extrémité chaude en PTFE (fluoroplastique) ne pouvait pas vivre longtemps - tôt ou tard, elle était retirée du bloc chauffant, ce qui était encore compliqué par le fait que le trou de 10 mm où les leviers étaient connectés ne correspondait pas au standard chinois. extrudeuses. Venant avec des extrudeurs de plus en plus complexes, j'ai réalisé que c'était la route vers nulle part. J'ai décidé de résoudre le problème non pas par la force mais par mon esprit, à savoir que toute extrudeuse que vous pouvez acheter devrait apparaître, donc il doit y avoir un support pour fixer l'extrudeuse de n'importe quelle forme. J'ai ajouté une petite branche de l'un des leviers et l'ai tournée d'une douzaine de degrés - le problème a été résolu, mais j'ai dû modifier un peu plus le firmware (firmware dans le répertoire Software / Marlin).Comment
Après avoir assemblé cette conception et procédé aux tests, il est immédiatement devenu clair que l'extrémité chaude en PTFE (fluoroplastique) ne pouvait pas vivre longtemps - tôt ou tard, elle était retirée du bloc chauffant, ce qui était encore compliqué par le fait que le trou de 10 mm où les leviers étaient connectés ne correspondait pas au standard chinois. extrudeuses. Venant avec des extrudeurs de plus en plus complexes, j'ai réalisé que c'était la route vers nulle part. J'ai décidé de résoudre le problème non pas par la force mais par mon esprit, à savoir que toute extrudeuse que vous pouvez acheter devrait apparaître, donc il doit y avoir un support pour fixer l'extrudeuse de n'importe quelle forme. J'ai ajouté une petite branche de l'un des leviers et l'ai tournée d'une douzaine de degrés - le problème a été résolu, mais j'ai dû modifier un peu plus le firmware (firmware dans le répertoire Software / Marlin).Comment Vissé l'analogique E3DV5 - et cela a fonctionné. Au cours du processus d'étalonnage, il s'est avéré que l'épaisseur du levier n'était clairement pas suffisante, ils ont fléchi - le levier a été épaissi et des doubles leviers avec la possibilité d'ajuster la tension ont été faits pour les leviers électriques.Double leviers
Vissé l'analogique E3DV5 - et cela a fonctionné. Au cours du processus d'étalonnage, il s'est avéré que l'épaisseur du levier n'était clairement pas suffisante, ils ont fléchi - le levier a été épaissi et des doubles leviers avec la possibilité d'ajuster la tension ont été faits pour les leviers électriques.Double leviers Et réglage de la tension
Et réglage de la tension Axe ZLa partie la plus triste de l'histoire. Ensuite, j'ai fait toutes les erreurs qui pouvaient être commises. Le principal est l'utilisation d'un roulement linéaire par guide linéaire. C'est vrai - deux pour chacun. Eh bien, en général, l'axe z pend un peu - mais comme la plate-forme est reliée aux axes des leviers - ils traînent en une seule unité et le balancement ne pose pas de problème.L'axe Z est quelque chose qui doit être refait complètement. Pendant le fonctionnement, est sorti z vacillant. 4 roulements linéaires et un système de tension de courroie devraient aider. Le support doit être modulaire - maintenant, pour ajouter ou améliorer quelque chose, vous devez démonter le sol de la partie supérieure.ElectronicsRamps 1.4 + DVR8825 + HC05 est déjà un tandem éprouvé (seul le régulateur Arduino pour 5v est clairement faible - il a été remplacé par lm7805).Le module LCD - RepRapDiscount Smart Controller - est triste, mais tous les modules de reprap d'une très grande taille et leur compression sont la plus grande complexité de conception (étant donné que tout ce qui pourrait s'adapter à une surface 1,5 fois plus petite).Alimentation - externe avec prise DC - 12v 8.5A. La consommation de plus de 60 watts n'a pas pu être enregistrée (c'est avec une table chauffante).Table chauffante - 12x12cm. En utilisant du ruban kapton en aluminium, du nichrome de 80 cm 0,4 a été collé et recouvert de verre de 4 mm. Après 5 minutes de chauffage, ils donnent ~ 95 degrés (selon la thermistance). Ces degrés et dégraissage suffisent pour imprimer de l'ABS (la vidéo avait une température de 60 et du sirop de sucre, maintenant je l'essuie juste avec de l'alcool avant l'impression).Près du Macbook 13 ".
Axe ZLa partie la plus triste de l'histoire. Ensuite, j'ai fait toutes les erreurs qui pouvaient être commises. Le principal est l'utilisation d'un roulement linéaire par guide linéaire. C'est vrai - deux pour chacun. Eh bien, en général, l'axe z pend un peu - mais comme la plate-forme est reliée aux axes des leviers - ils traînent en une seule unité et le balancement ne pose pas de problème.L'axe Z est quelque chose qui doit être refait complètement. Pendant le fonctionnement, est sorti z vacillant. 4 roulements linéaires et un système de tension de courroie devraient aider. Le support doit être modulaire - maintenant, pour ajouter ou améliorer quelque chose, vous devez démonter le sol de la partie supérieure.ElectronicsRamps 1.4 + DVR8825 + HC05 est déjà un tandem éprouvé (seul le régulateur Arduino pour 5v est clairement faible - il a été remplacé par lm7805).Le module LCD - RepRapDiscount Smart Controller - est triste, mais tous les modules de reprap d'une très grande taille et leur compression sont la plus grande complexité de conception (étant donné que tout ce qui pourrait s'adapter à une surface 1,5 fois plus petite).Alimentation - externe avec prise DC - 12v 8.5A. La consommation de plus de 60 watts n'a pas pu être enregistrée (c'est avec une table chauffante).Table chauffante - 12x12cm. En utilisant du ruban kapton en aluminium, du nichrome de 80 cm 0,4 a été collé et recouvert de verre de 4 mm. Après 5 minutes de chauffage, ils donnent ~ 95 degrés (selon la thermistance). Ces degrés et dégraissage suffisent pour imprimer de l'ABS (la vidéo avait une température de 60 et du sirop de sucre, maintenant je l'essuie juste avec de l'alcool avant l'impression).Près du Macbook 13 ".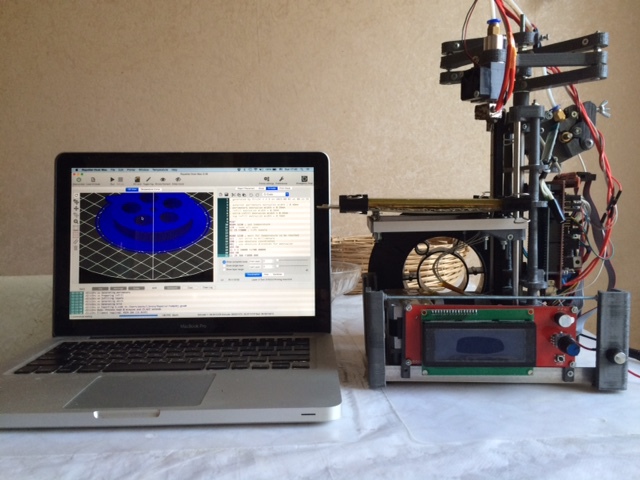 Firmware et sourceTout sur GitHub . Modifié par Marlin dans le répertoire Software / Marlin)
Firmware et sourceTout sur GitHub . Modifié par Marlin dans le répertoire Software / Marlin)Ce qui doit être refait / amélioré
- Axe z
- Rapport de vitesse (je pense que 6-9 maximum)
- Attachez la ceinture directement aux gros engrenages et retournez-la
- Modularité
- Un peu de rigidité
- Réduisez la taille - mais enregistrez les paramètres de l'espace de travail
- Réduire le poids - un peu plus mince Nema17 (-1cm)
Prix
51 $ - 5 Nema17 (1 restera en réserve)32 $ - Rampes 1.4 + 5 Dvr8825 + LCD (1 drv8825 reste en réserve)7 $ - E3DV5 (chinois) sous le Bowden, avec un tube mètre (un demi-mètre restera en réserve)2 $ - engrenage pour extrudeuse6 $ - engrenages pour courroiegt2 et courroie gt2 5 $ - guides de 6 mm (2x20cm) et 12 roulements linéaires (4 sont nécessaires)~ 8 $ - roulements à billes + nichrome + attaches + coins en aluminium + petites choses10 $ unité extérieure Alimentation 8.5A 12VTotal: 120 $ (y compris l'alimentation, mais à l'exclusion du plastique pour l'impression - environ ~ 200 grammes)PS Ne demandez pas d'exemples d'impression - l'oscillation de Z gâche toute l'image (tout est de très haute qualité sur XY) - lorsque je terminerai la v2, je ferai un test de qualité (et peut-être même le comparerai avec M3D). V1 est une preuve de travail.PS2 Toujours pas eu son M3D.Source: https://habr.com/ru/post/fr382171/
All Articles