Un chercheur a appris à tromper la navigation laser sur les robots
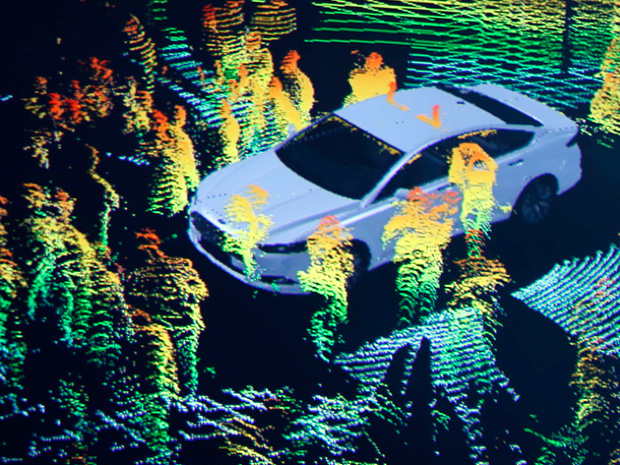 Un spécialiste de Security Innovation, une société de sécurité logicielle, a souligné les défauts du système d'orientation laser LiDAR utilisé par certains développeurs de voitures robotiques. En créant un appareil simple à partir d'un pointeur et d'un ordinateur Raspberry Pi à carte unique, vous pouvez facilement tromper le capteur d'une voiture.Jonathan Petit, un chercheur de la société, affirme qu'avec ce kit, il est possible de recréer l'écho des signaux d'une voiture inexistante et de "le placer n'importe où", c'est-à-dire de faire en sorte que le système de navigation d'un robot puisse "voir" un obstacle inexistant. En utilisant cela, vous pouvez faire la manœuvre du robot, s'arrêter ou rester immobile, car son ordinateur supposera qu'il est entouré d'objets qui n'existent pas dans la réalité.Certains développeurs de robomobile essaient d'utiliser des radars à courte portée dans leur conception, mais travailler sur les fréquences radio nécessite une licence. L'utilisation d'un télémètre laser est très simple - il envoie des impulsions et étudie la lumière réfléchie.Petit a fait un travail scientifique décrivant la structure et le schéma de son travail pendant ses études à l'Université nationale irlandaise de Cork. Il sera présenté lors de la conférence de sécurité internationale de Black Hat Europe en novembre. Petit s'est intéressé à la recherche sur la sécurité des véhicules robotiques et a presque immédiatement conclu que leur point le plus vulnérable était un système de navigation laser.«C'est le point clé - l'endroit où toutes les contributions entrent», dit-il. Si le robot a une mauvaise entrée, il prendra de mauvaises décisions en conduisant. La partie la plus difficile à tromper votre système de navigation est le timing précis. Il est nécessaire d'envoyer de faux faisceaux de réponse lorsque le système attend leur arrivée. "Petit a enregistré les impulsions émises par le laser, les a analysées et a écrit un programme envoyant de fausses impulsions de réponse. En conséquence, le chercheur a pu créer un système qui simule avec succès la présence d'un objet à une distance de 20 à 350 mètres du robot. Il peut même imiter la présence de plusieurs objets, y compris des objets en mouvement. Pour attaquer, vous devez être à moins de 100 mètres de chaque côté du capteur laser, et il n'est même pas nécessaire de pouvoir diriger avec précision le faisceau laser vers lui.Les voitures modernes regorgent de technologies conçues pour simplifier la vie du conducteur, mais en même temps, elles ont leurs propres vulnérabilités. Récemment, une paire de pirates a démontré l'interception de la télécommandeSystèmes automobiles Jeep Cherokee équipés du système FCA Uconnect (Internet dans la voiture).Les Singapouriens développent un système de taxis autonomes, semblable aux voitures pour la conduite sur les terrains de golfSelon Petit, il est impossible de commencer à penser trop tôt à la sécurité de la technologie. Et il y a toujours la possibilité d'améliorer la sécurité - par exemple, un bon système devrait avoir un moyen de comparer les données reçues du laser avec les données d'autres capteurs, et d'éliminer les incohérences qui surviennent. Et les développeurs de robomobiles devraient déjà commencer à penser dans cette direction - car entre leurs mains, il n'y a pas seulement la sécurité d'un certain système informatique, mais la vie et la santé humaines.
Un spécialiste de Security Innovation, une société de sécurité logicielle, a souligné les défauts du système d'orientation laser LiDAR utilisé par certains développeurs de voitures robotiques. En créant un appareil simple à partir d'un pointeur et d'un ordinateur Raspberry Pi à carte unique, vous pouvez facilement tromper le capteur d'une voiture.Jonathan Petit, un chercheur de la société, affirme qu'avec ce kit, il est possible de recréer l'écho des signaux d'une voiture inexistante et de "le placer n'importe où", c'est-à-dire de faire en sorte que le système de navigation d'un robot puisse "voir" un obstacle inexistant. En utilisant cela, vous pouvez faire la manœuvre du robot, s'arrêter ou rester immobile, car son ordinateur supposera qu'il est entouré d'objets qui n'existent pas dans la réalité.Certains développeurs de robomobile essaient d'utiliser des radars à courte portée dans leur conception, mais travailler sur les fréquences radio nécessite une licence. L'utilisation d'un télémètre laser est très simple - il envoie des impulsions et étudie la lumière réfléchie.Petit a fait un travail scientifique décrivant la structure et le schéma de son travail pendant ses études à l'Université nationale irlandaise de Cork. Il sera présenté lors de la conférence de sécurité internationale de Black Hat Europe en novembre. Petit s'est intéressé à la recherche sur la sécurité des véhicules robotiques et a presque immédiatement conclu que leur point le plus vulnérable était un système de navigation laser.«C'est le point clé - l'endroit où toutes les contributions entrent», dit-il. Si le robot a une mauvaise entrée, il prendra de mauvaises décisions en conduisant. La partie la plus difficile à tromper votre système de navigation est le timing précis. Il est nécessaire d'envoyer de faux faisceaux de réponse lorsque le système attend leur arrivée. "Petit a enregistré les impulsions émises par le laser, les a analysées et a écrit un programme envoyant de fausses impulsions de réponse. En conséquence, le chercheur a pu créer un système qui simule avec succès la présence d'un objet à une distance de 20 à 350 mètres du robot. Il peut même imiter la présence de plusieurs objets, y compris des objets en mouvement. Pour attaquer, vous devez être à moins de 100 mètres de chaque côté du capteur laser, et il n'est même pas nécessaire de pouvoir diriger avec précision le faisceau laser vers lui.Les voitures modernes regorgent de technologies conçues pour simplifier la vie du conducteur, mais en même temps, elles ont leurs propres vulnérabilités. Récemment, une paire de pirates a démontré l'interception de la télécommandeSystèmes automobiles Jeep Cherokee équipés du système FCA Uconnect (Internet dans la voiture).Les Singapouriens développent un système de taxis autonomes, semblable aux voitures pour la conduite sur les terrains de golfSelon Petit, il est impossible de commencer à penser trop tôt à la sécurité de la technologie. Et il y a toujours la possibilité d'améliorer la sécurité - par exemple, un bon système devrait avoir un moyen de comparer les données reçues du laser avec les données d'autres capteurs, et d'éliminer les incohérences qui surviennent. Et les développeurs de robomobiles devraient déjà commencer à penser dans cette direction - car entre leurs mains, il n'y a pas seulement la sécurité d'un certain système informatique, mais la vie et la santé humaines.Source: https://habr.com/ru/post/fr383945/
All Articles