Quadcoptères - comment tout a commencé?
Un hélicoptère quadro (hexa, octo) moderne est un appareil «informatique» assez puissant qui peut être contrôlé à partir d'un smartphone via WiFi, se bloquer à un moment donné, voler le long d'un itinéraire, etc. Tout le monde peut acheter un tel appareil maintenant. Comment tout a commencé?Comment vole un quadricoptère?
Pour comprendre l'essence des solutions techniques, nous comprendrons un peu comment vole un quadricoptère. En fait, un quadricoptère est un système instable. Si vous prenez 4 moteurs et que vous les connectez simplement à la batterie, le quadricoptère ne volera nulle part, il roulera simplement. la puissance de traction des moteurs ne sera jamais identique. Et puis l'électronique entre en vigueur. À bord du quadricoptère, il y a une «carte de commande» centrale, dont la partie clé est l'unité de capteur. Dans le cas le plus simple, il s'agit d'un gyroscope à trois axes. Le microcontrôleur lit en permanence les données des gyroscopes et dès que le gyroscope «détecte» l'inclinaison le long de n'importe quel axe, le contrôleur demande au moteur correspondant d'augmenter ou de diminuer légèrement la vitesse afin de compenser l'inclinaison. En général, toute la logique - à l'exception d'un tas de tout (contrôleurs PID, théorie du contrôle, filtres Kalman),il n'y a rien de compliqué (une blague). Eh bien, pour l'utilisateur, tout est vraiment transparent. Il n'y a pas de pièces mobiles à l'exception des moteurs dans le quadricoptère, tout le contrôle est effectué exclusivement en changeant la rotation des tours du moteur (avec des tours de même - nous changeons la vitesse de rotation, nous obtenons le couple). Revenons maintenant à l'histoire.Attention, trafic.Mikrokopter
La légendaire entreprise allemande, grâce aux ingénieurs dont en 2006 le premier appareil est apparu. Le contrôleur avait un processeur Atmega644 à bord avec 4K de mémoire et une fréquence allant jusqu'à 20 MHz, 3 gyroscopes sur chaque axe, un accéléromètre (pour le vol horizontal) et un baromètre pour maintenir l'altitude (la précision du baromètre MPX4115A est d'environ 1 m). Plus tard, des modules supplémentaires sont apparus, par exemple le GPS pour maintenir une position.Maintenant, vous pouvez trouver une vidéo sur YouTube sur la façon dont tout s'est déroulé (2007).En général, le système a été très efficace. Leurs produits n'étaient jamais bon marché, le prix a commencé quelque part à partir de 1500 euros. L'entreprise existe maintenant, ils produisent des appareils professionnels, la catégorie de prix correspondante. Et un autre point important - au départ, les créateurs de Microcopter ont ouvert le code source. Bien sûr, dans un proche avenir, divers clones (y compris ceux fabriqués en Fédération de Russie) ont commencé à apparaître, ce qui a bien sûr affecté les ventes, puis le code a été fermé. Mais tout de même, je pense que cela a donné une grande impulsion à la création d'un type différent de multicoptère.Nous MikroKopter n'était pas populaire à cause du prix, et il n'y avait pas autant de propriétaires. Cependant, une impulsion a été donnée à la communauté mondiale et divers systèmes ont commencé à apparaître.Kaptainkuk
L'un des systèmes les plus simples produits (en différentes versions) de 2010 à nos jours. La carte de contrôle n'a que 3 gyroscopes, des résistances variables ordinaires sont utilisées pour ajuster les paramètres.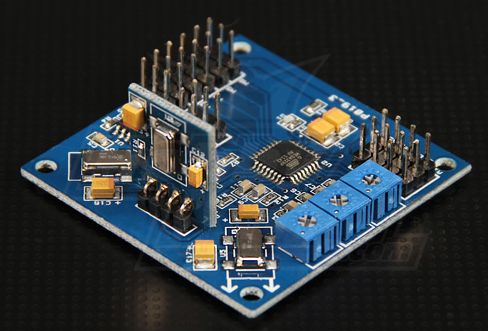 (Photo de Hobbyking.com)Une telle carte ne coûte désormais que 15 $ environ, comme vous pouvez le voir, à bord, en plus des gyroscopes et d'un processeur faible, en général, il n'y a rien. Le firmware du code source de KK est disponible gratuitement sur Internet, ceux qui le souhaitent peuvent le télécharger en tapant le nom de fichier "kk2_1V1.zip" dans la recherche Google (la taille n'est que de 90Ko). Il s'agit probablement de la première et dernière version du firmware d'un hélicoptère, écrite en assembleur.
(Photo de Hobbyking.com)Une telle carte ne coûte désormais que 15 $ environ, comme vous pouvez le voir, à bord, en plus des gyroscopes et d'un processeur faible, en général, il n'y a rien. Le firmware du code source de KK est disponible gratuitement sur Internet, ceux qui le souhaitent peuvent le télécharger en tapant le nom de fichier "kk2_1V1.zip" dans la recherche Google (la taille n'est que de 90Ko). Il s'agit probablement de la première et dernière version du firmware d'un hélicoptère, écrite en assembleur.Multiwii
La prochaine étape importante dans le développement des hélicoptères a été le système MultiWii. Le nom vient du joueur Nintendo Wii et Wii Nunchuk, que les artisans ont démonté et scié une planche avec des capteurs à partir de là. L'Arduino Nano a été utilisé comme processeur central.L'apparence de la carte s'est avérée être quelque chose comme ça (photo du site rcgroups, 2010):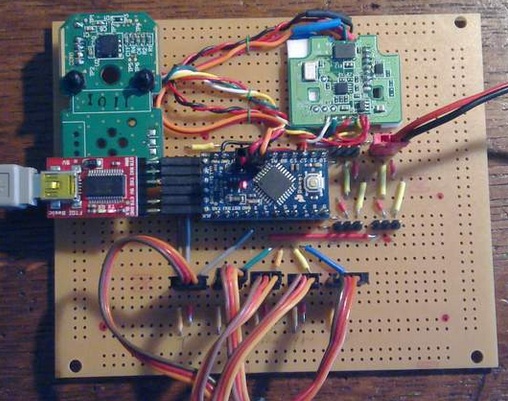 Cependant, en quelques années, le système a évolué, et les dernières cartes (elles sont vendues maintenant, le prix est de 20-30 $) ressemblent à ceci:
Cependant, en quelques années, le système a évolué, et les dernières cartes (elles sont vendues maintenant, le prix est de 20-30 $) ressemblent à ceci: (photo du site Hobbyking.com)Les dernières versions de MultiWii ont de très bons capteurs, ils peuvent se bloquer à un point sur le GPS, tenir l'altitude et rentrer chez eux. Parce que Multiwii a été écrit pour Arduino, toutes les cartes sont restées compatibles Arduino, le code source peut être téléchargé sur Github. L'un des inconvénients de MultiWii est son processeur faible, qui limite les capacités de calcul des algorithmes; des clones ultérieurs sur STM32 ont commencé à apparaître, mais ils n'ont pas fait le temps, comme en termes de matériel, tout quadricoptère est assez simple, 95% de la complexité réside précisément dans le code. En même temps, je suis sûr que ce sont les sources MultiWii qui sont devenues la base de tous les systèmes commerciaux d'aujourd'hui.
(photo du site Hobbyking.com)Les dernières versions de MultiWii ont de très bons capteurs, ils peuvent se bloquer à un point sur le GPS, tenir l'altitude et rentrer chez eux. Parce que Multiwii a été écrit pour Arduino, toutes les cartes sont restées compatibles Arduino, le code source peut être téléchargé sur Github. L'un des inconvénients de MultiWii est son processeur faible, qui limite les capacités de calcul des algorithmes; des clones ultérieurs sur STM32 ont commencé à apparaître, mais ils n'ont pas fait le temps, comme en termes de matériel, tout quadricoptère est assez simple, 95% de la complexité réside précisément dans le code. En même temps, je suis sûr que ce sont les sources MultiWii qui sont devenues la base de tous les systèmes commerciaux d'aujourd'hui.Arducopter
Un autre système basé sur Arduino est allé le plus loin. Maintenant, c'est un système avec la possibilité de vol point à point programmable, la prise en charge des modems radio et la transmission de télémétrie, le stockage de divers journaux, etc.Leur logiciel ressemble à ceci: les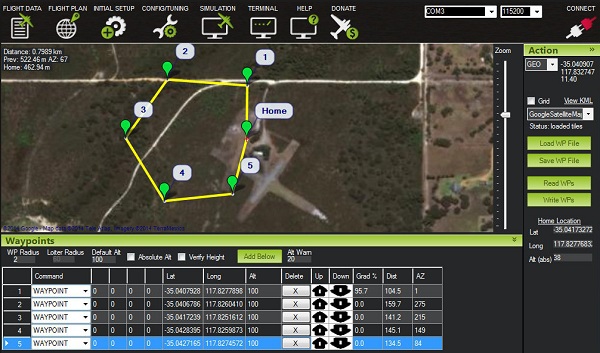 cartes ont évolué à partir de celles-ci:
cartes ont évolué à partir de celles-ci: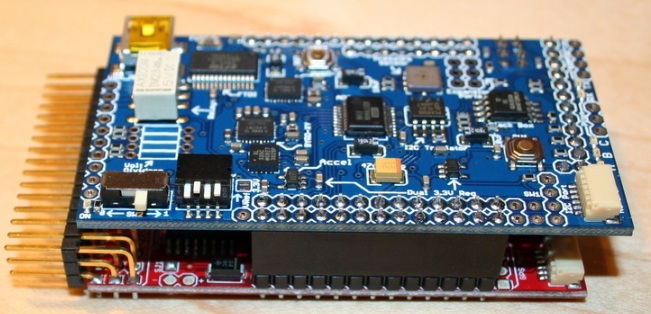 ces
ces cartes sont vendues maintenant, le prix est de 50 $ (par clone) à 250 $ pour les versions originales. Les codes sources d'Ardupilot sont également entièrement disponibles sur github, et à en juger par le nombre de validations, le projet se développe activement. Ce système n'est pas inférieur aux capacités des appareils professionnels, la qualité du vol peut être vue dans la vidéo:Tout est cool ici, sauf un «mais» - c'est Open Source, avec toutes les conséquences qui en découlent. Le système est ouvert, finalisé par des passionnés, et personne ne garantit rien, y compris l'absence de bugs dans les logiciels. Si le quadricoptère tombe sur la BMW de quelqu'un d'autre, personne ne pourra se plaindre.
cartes sont vendues maintenant, le prix est de 50 $ (par clone) à 250 $ pour les versions originales. Les codes sources d'Ardupilot sont également entièrement disponibles sur github, et à en juger par le nombre de validations, le projet se développe activement. Ce système n'est pas inférieur aux capacités des appareils professionnels, la qualité du vol peut être vue dans la vidéo:Tout est cool ici, sauf un «mais» - c'est Open Source, avec toutes les conséquences qui en découlent. Le système est ouvert, finalisé par des passionnés, et personne ne garantit rien, y compris l'absence de bugs dans les logiciels. Si le quadricoptère tombe sur la BMW de quelqu'un d'autre, personne ne pourra se plaindre.Cardan sans balais
En parallèle avec les quadrocoptères, une autre technologie très intéressante a été développée - le cardan sans balais pour caméra photo / vidéo. Il s'agit d'une carte séparée avec ses capteurs, qui maintient la caméra dans la position souhaitée grâce à deux moteurs, compensant les tours dans les axes correspondants. Ils ont été développés par notre compatriote, comment fonctionne la suspension, peut être vu sur la vidéo (2013e année).On peut voir que l'hélicoptère oscille, mais l'axe de la caméra ne l'est pas.Maintenant, ce n’est une surprise pour personne, et c’était une véritable percée dans la qualité du tournage vidéo.Systèmes commerciaux
Les écrire n'est pas si intéressant, car le principe ici est simple, «payer et voler». Le premier était le MicroKopter susmentionné, la prochaine tentative (et pas très réussie) était XAircraft, les appareils Gaui étaient populaires dans le secteur du budget (c'était le premier appareil à un budget d'environ 400 $ pour un hélicoptère prêt). Et enfin, la société la plus prospère est DJI, sur laquelle seuls les paresseux n'ont pas écrit, il est donc inutile de répéter ici. Ils sont entrés sur le marché avec des contrôleurs DJI Naza (à un prix de 200 à 400 $, avec la possibilité de conserver une position, de rentrer chez eux), il y avait une série DJI Wookong professionnelle distincte (à un prix d'environ 1000 $ et une plus grande stabilité de vol). Enfin, DJI est entré sur le marché des appareils prêts pour le vol (RTF, Ready To Fly), eh bien, tout le monde les connaît déjà.Et les dernières vidéos.Le premier quadricoptère économique Gaui 330. Prix d'émission de 400 $, 2010, pas de fonctions supplémentaires.Dji Naza v2, le prix d'émission est le même 400 $, la possibilité de tenir une position, de rentrer chez lui, de voler de chaque côté vers le pilote (mode sans soucis).Dji Phantom 3 - avec cardan de caméra intégré, commandes de smartphone et autres goodies.C'est tout pour l'instant, désolé pour le grand nombre de vidéos, mais sans elles rien, sinon ce serait sans intérêt. Voyons ce qui se passe ensuite, après 5 ans ... Source: https://habr.com/ru/post/fr384163/
All Articles