 Cette année, nous avons participé au championnat de lancement de sonde météo CanSat et nous nous sommes fixé un objectif ambitieux: transformer la sonde en drone complet, dans le respect des règles de la compétition
Cette année, nous avons participé au championnat de lancement de sonde météo CanSat et nous nous sommes fixé un objectif ambitieux: transformer la sonde en drone complet, dans le respect des règles de la compétitionCe poste comprend:
1) description de l'appareil2) objectif de sa création3) processus d'assemblage4) tests en vol5) lancement finalLa description
L'appareil est un quadricoptère à deux modes: en passif, il prend la forme d'un cylindre qui est placé dans le corps de la fusée, dans les rayons actifs sont ouverts, les moteurs démarrés, la mission principale commence, qui consiste à collecter des données sur l'état de la surface et de l'atmosphère de la terre, vol autonome selon points de consigne (avec possibilité d'intercepter le contrôle du pilote) et retour à la base.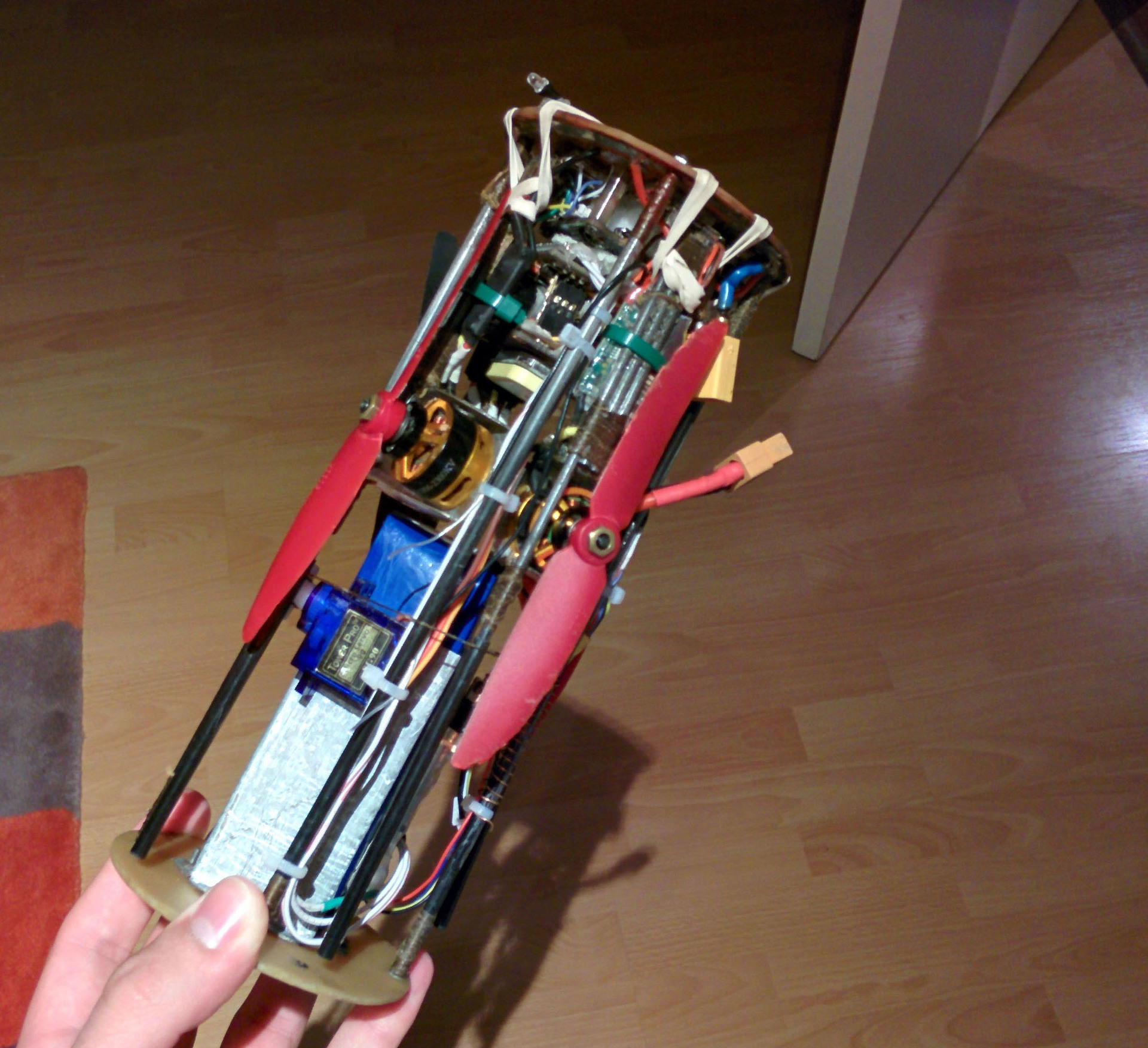 État plié
État pliéLes caractéristiques:
Temps de vol: 6-12 minutesPortée de vol horizontale: 4 kmPortée de vol verticale: 2 kmTemps de transition en mode actif: 3 secondesPoids: 600 gCapteurs installés: baromètre, accéléromètre, gyroscope, magnétomètre, GPS, caméra infrarougeLe projet a été créé pour participer à la ligue majeure du championnat CanSat, qui est détenu par le SINP MSU.Qu'est-ce que le Kansat, . («»), , .
— , 1-4 , , . .
, , . , , . .
3 :
— 0.5 , 350 , , , , ATmega 128, RXQ2 (433 ). 500.
— , . : 200, . 1 .
— (30 ) .
Mon équipe avait de l'expérience en participant au championnat: l'année dernière, nous étions dans la ligue régulière. Au lieu d'un designer prêt à l'emploi, il a été décidé de créer le vôtre, tout en préservant les principaux composants de l'ensemble de base, afin que les règles ne soient pas réellement violées, mais nous en avons informé les organisateurs. Nous avons réussi à réduire la taille de la planche de 3 fois grâce à l'utilisation de l'impression recto verso, donc théoriquement, nous pourrions participer au championnat américain, mais en raison de la production à domicile, la planche a fonctionné avec quelques interruptions, ce qui ne nous a pas permis de lancer sur une fusée.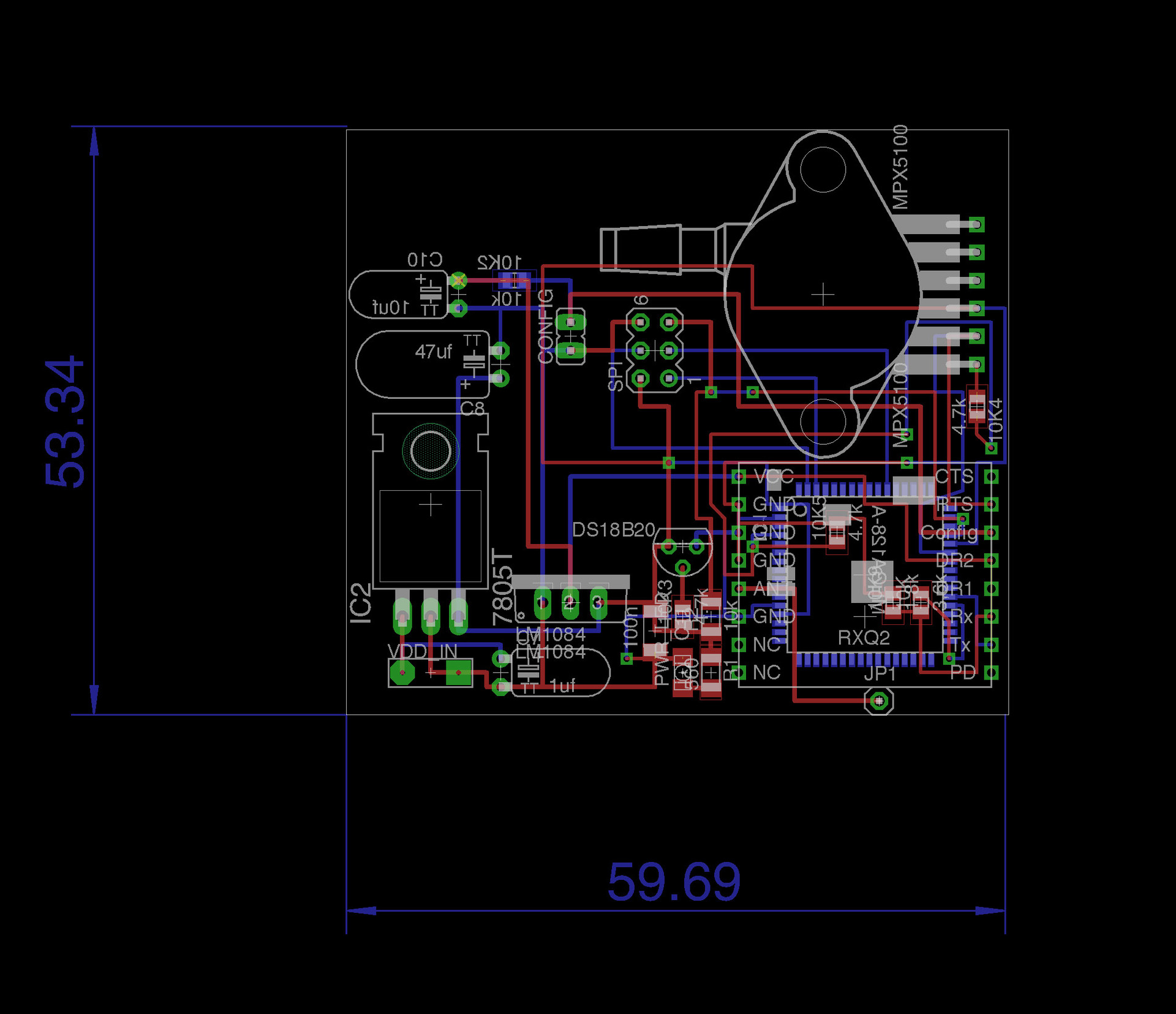 Circuit imprimé principalNotre mission supplémentaire était de photographier la Terre dans le domaine infrarouge avec une caméra 16x4 pixels et le domaine visible avec une superposition supplémentaire. Comme la pratique l'a montré, le projet était de toute façon inutile, car la sonde se balançait constamment en raison de la chute du parachute, il y avait un manque de vitesse d'ouverture et de vitesse de prise de vue, donc toutes les vidéos étaient floues.
Circuit imprimé principalNotre mission supplémentaire était de photographier la Terre dans le domaine infrarouge avec une caméra 16x4 pixels et le domaine visible avec une superposition supplémentaire. Comme la pratique l'a montré, le projet était de toute façon inutile, car la sonde se balançait constamment en raison de la chute du parachute, il y avait un manque de vitesse d'ouverture et de vitesse de prise de vue, donc toutes les vidéos étaient floues.exemple d'une telle vidéo
( 0:35)
. 2-
Plus de détails sur la façon dont nous avons tous éclaté1) - , .
2) , - , . , .
3) 18 / .
4) , , .
, 4 , .
Il convient également de mentionner l'ancienne équipe, qui a participé à un championnat encore plus ancien. L'année dernière, ils ont participé à la ligue majeure. La principale caractéristique est l'utilisation d'une roue à au lieu d'un parachute, mais en raison de l'indisponibilité du code du programme et d'une carte de fortune, ils ne pouvaient pas non plus fonctionner.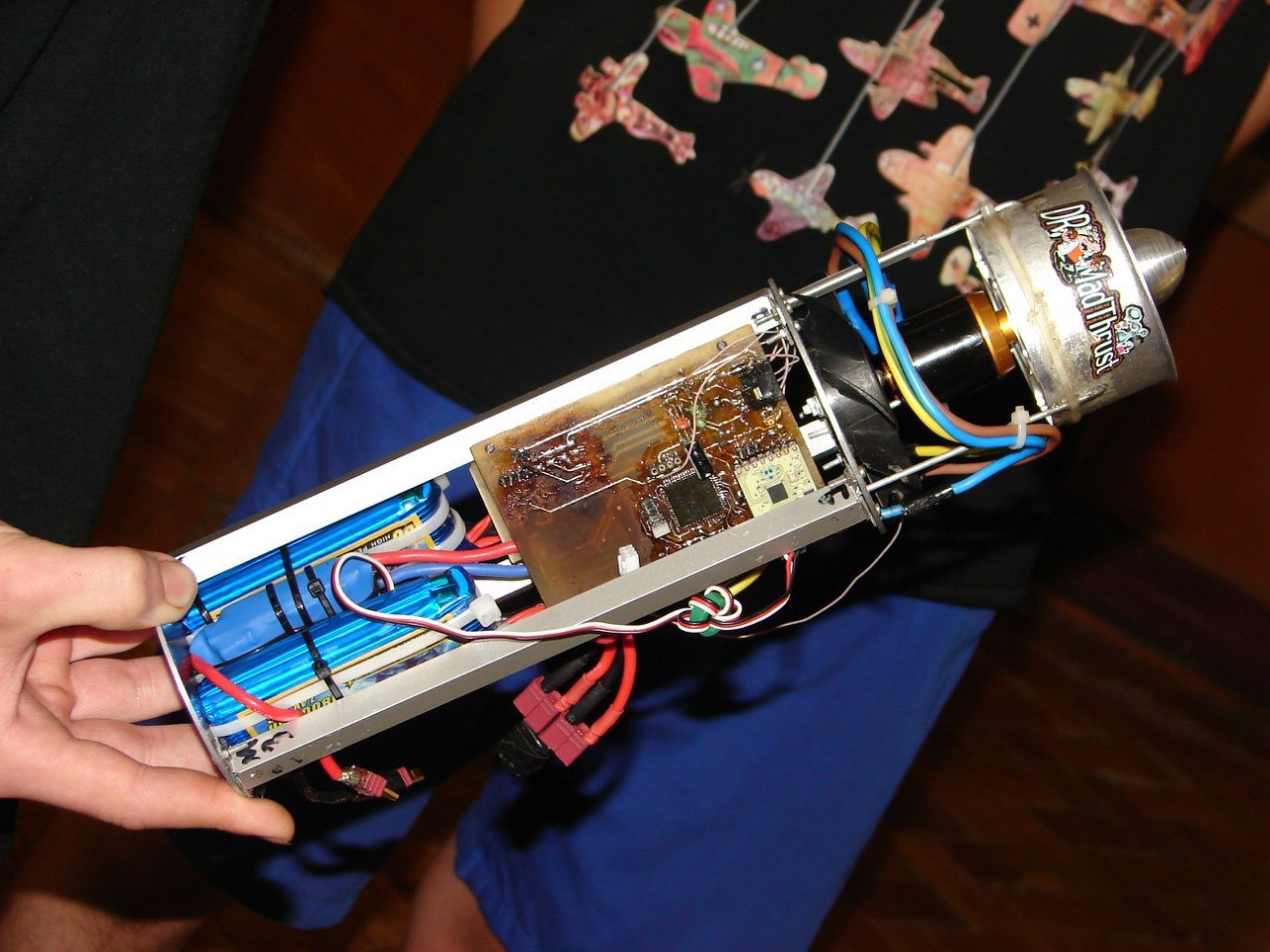 sonde de roue
sonde de roueLeur histoire
, , . , GPS GSM .
. , .
, , .
Cette année, il a été décidé de fusionner l'équipe. En conséquence, mon équipe a décidé de développer l'idée d'une descente contrôlée, à savoir de créer un quadricoptère qui tiendrait dans une fusée.Processus de création
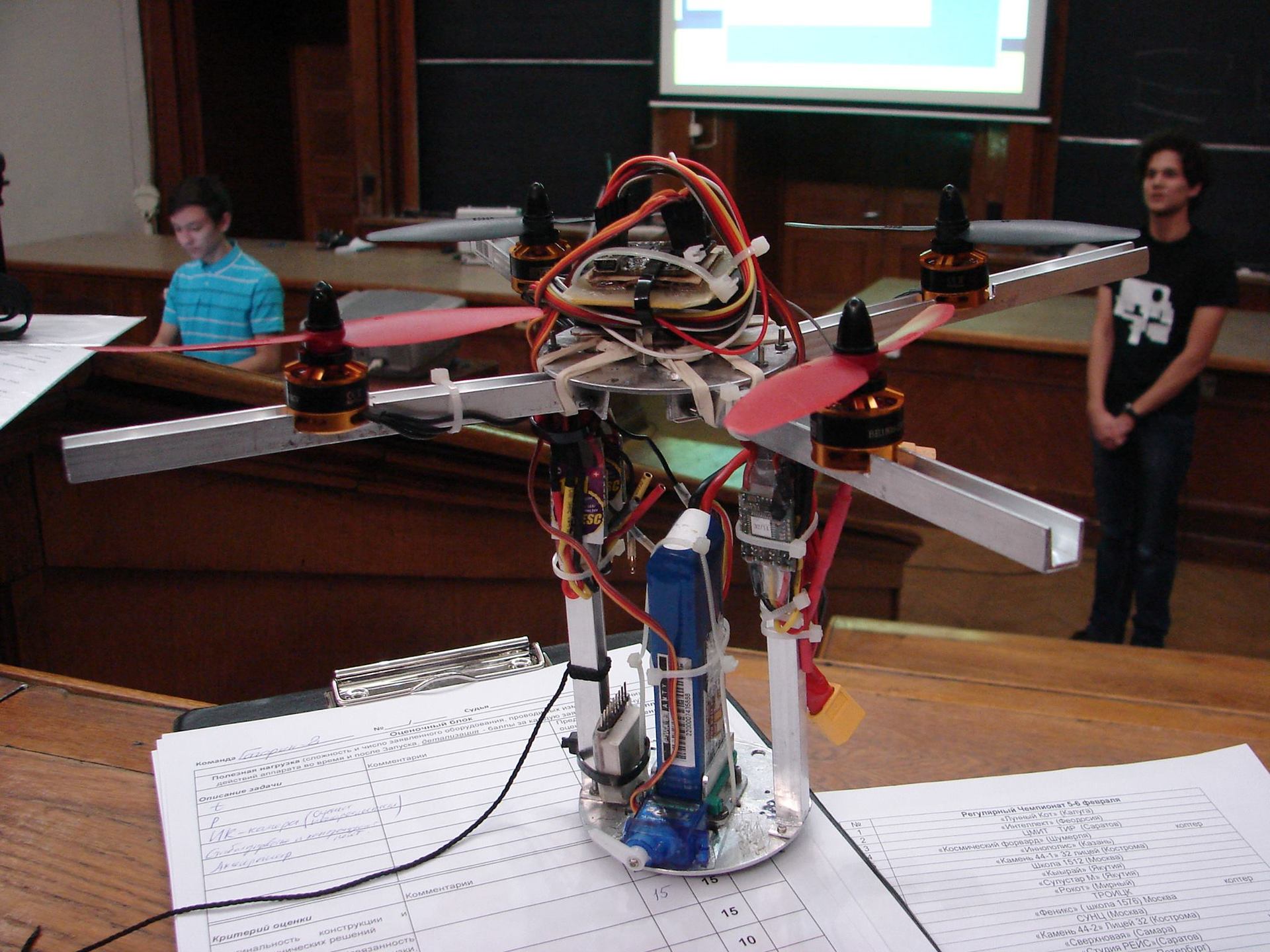 prototypeLe premier prototype que nous avons réalisé une semaine avant la session d'hiver pour convaincre le jury de la réalité de ce projet. Le cadre était en aluminium, les poutres aussi. En tant que contrôleur de vol, j'ai utilisé MultiWii, donc ce prototype ne pouvait révéler les rayons que sur commande de l'opérateur et voler en mode manuel.
prototypeLe premier prototype que nous avons réalisé une semaine avant la session d'hiver pour convaincre le jury de la réalité de ce projet. Le cadre était en aluminium, les poutres aussi. En tant que contrôleur de vol, j'ai utilisé MultiWii, donc ce prototype ne pouvait révéler les rayons que sur commande de l'opérateur et voler en mode manuel.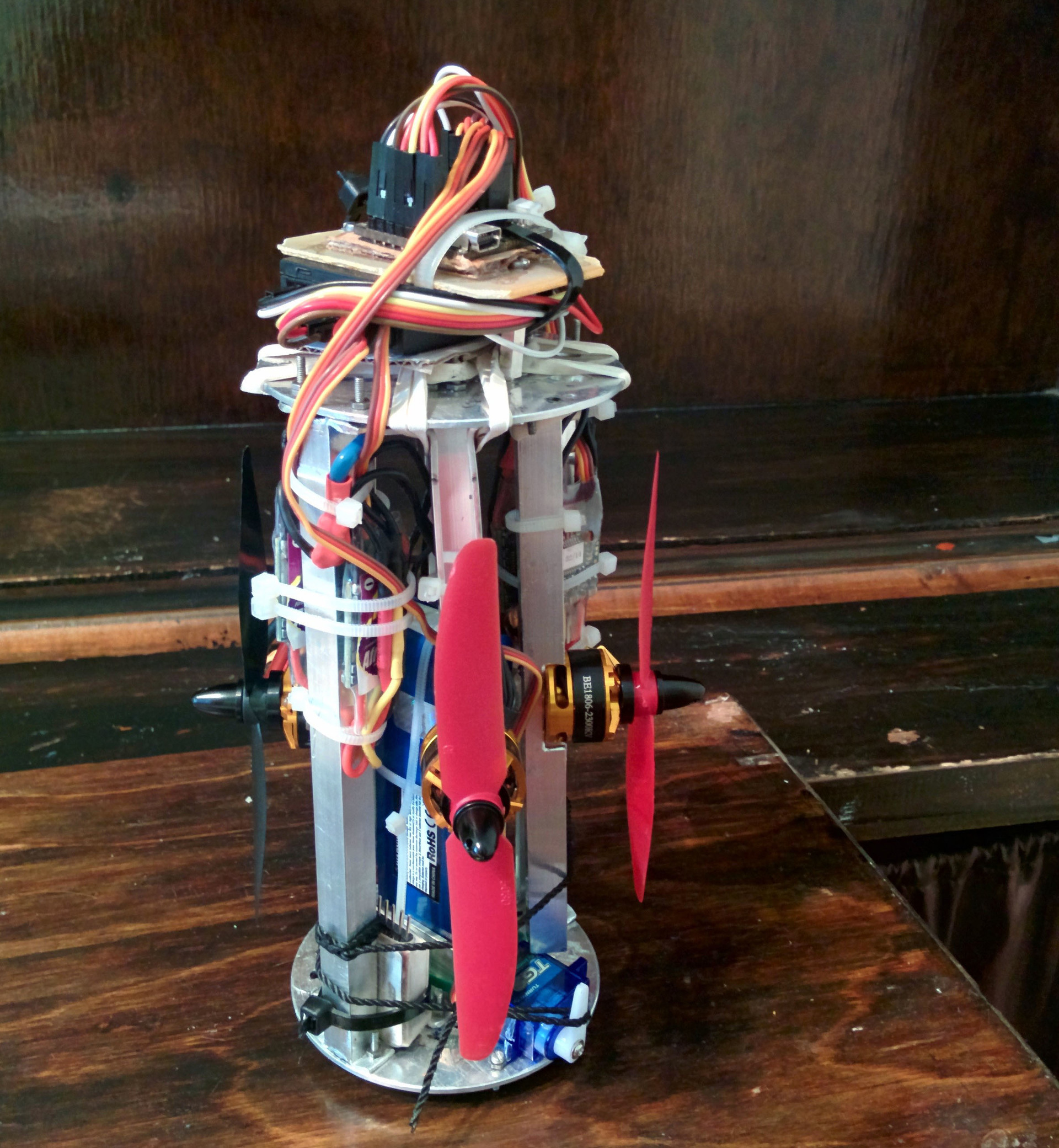 Le jury a apprécié le projet, nous avons pris la première place et nous pouvons maintenant commencer le montage. Soit dit en passant, juste avant la présentation lors du vol d'essai, notre moteur a grillé, nous l'avons changé en un de rechange. Pendant la présentation, le moteur a de nouveau grillé. Tous deux étaient connectés au même contrôleur de vitesse, nous ne l'avons plus utilisé.Malheureusement, la source de financement a disparu, il semblait plus près de réussir l'examen, ici je n'ai pas pu participer. En conséquence, après avoir réussi les examens, nous avons commandé d'urgence les pièces nécessaires par livraison express et, armés de tuyaux en carbone, de fils en Kevlar et d'époxy, nous avons commencé à assembler le cadre et les poutres. Au cours des deux semaines, l'idée que nous n'avions pas le temps ne m'a pas quitté, mais les billets de train ont été achetés, il n'y a pas eu de retour en arrière.
Le jury a apprécié le projet, nous avons pris la première place et nous pouvons maintenant commencer le montage. Soit dit en passant, juste avant la présentation lors du vol d'essai, notre moteur a grillé, nous l'avons changé en un de rechange. Pendant la présentation, le moteur a de nouveau grillé. Tous deux étaient connectés au même contrôleur de vitesse, nous ne l'avons plus utilisé.Malheureusement, la source de financement a disparu, il semblait plus près de réussir l'examen, ici je n'ai pas pu participer. En conséquence, après avoir réussi les examens, nous avons commandé d'urgence les pièces nécessaires par livraison express et, armés de tuyaux en carbone, de fils en Kevlar et d'époxy, nous avons commencé à assembler le cadre et les poutres. Au cours des deux semaines, l'idée que nous n'avions pas le temps ne m'a pas quitté, mais les billets de train ont été achetés, il n'y a pas eu de retour en arrière.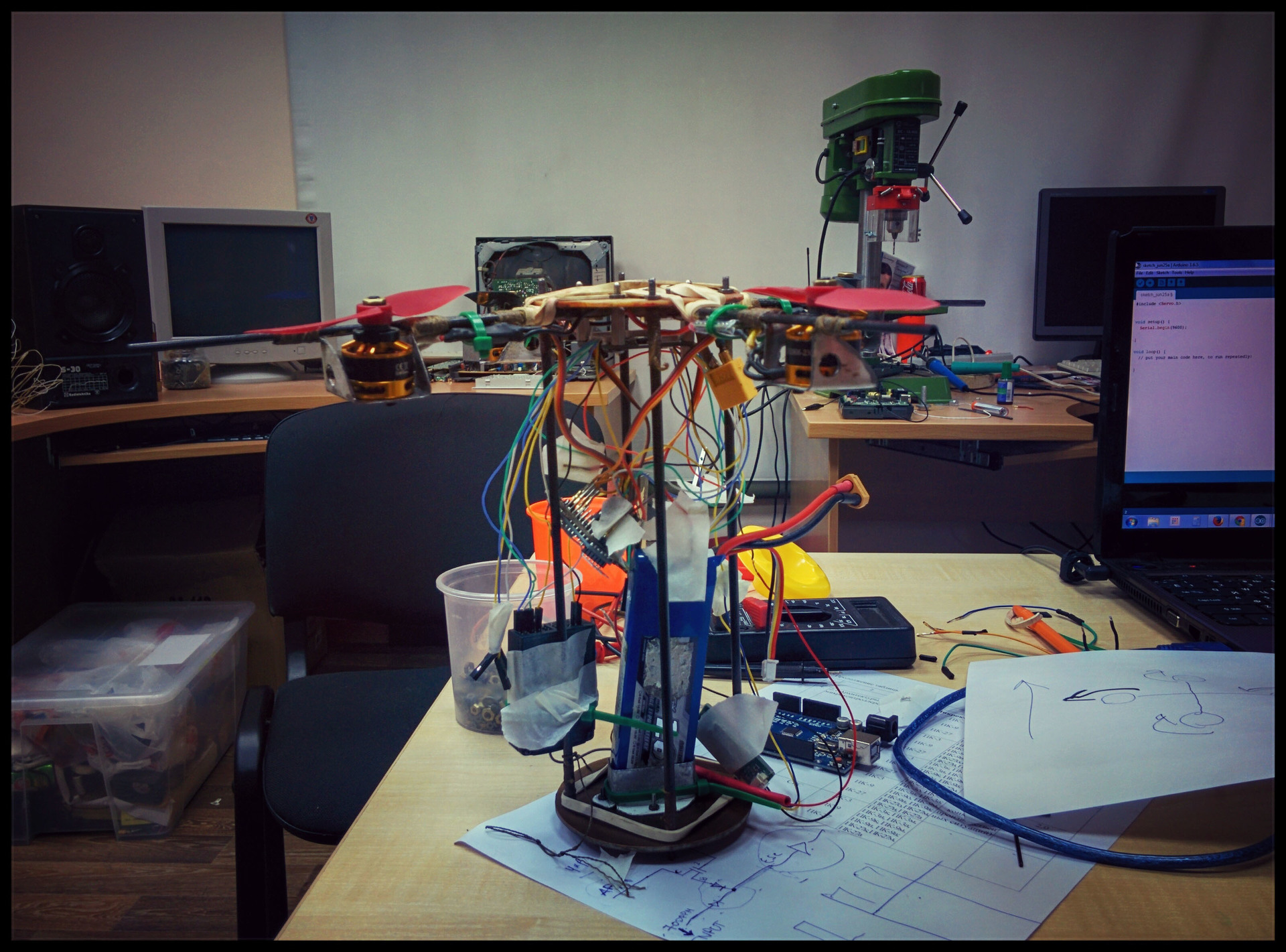 déboguer la version finaleNous n'avons pas eu à parler de tests en vol sérieux, nous n'avions qu'un seul modèle fonctionnel, sa perte signifiait un échec.Le premier lancement a eu lieu à l'intérieur du bâtiment, il a réussi, le deuxième lancement dans la rue en mode manuel a réussi, le troisième lancement en mode gps hold a été presque fatal. En raison d'un magnétomètre mal réglé, la sonde a cessé d'obéir aux commandes et s'est envolée vers le lac le plus proche, car le mur de l'auberge l'a arrêté. Nous avons perdu 2 poutres et 2 hélices, le châssis a survécu. Nous avions des poutres de rechange, donc les performances ont été restaurées en quelques heures. Après une longue configuration du magnétomètre, il y a eu une autre tentative - le lancement a réussi.Il restait à vérifier le retour à la base. Cette journée était juste à mon diplôme, mais il n'y avait rien à faire, nous sommes allés sur le terrain, avons essayé de rentrer chez nous - avec succès. Il n'y avait pas de limite à la joie, le lendemain, nous sommes allés à Moscou pour les lancements, mais le code de divulgation automatique n'était toujours pas écrit, et il semble que nous ayons répété l'erreur de l'année dernière.test retour à la baseje vais vous en dire plus sur le système de divulgation automatique.Il se compose d'un servomoteur, d'une corde, de bandes élastiques, d'une carte de commande et d'un photodétecteur.
déboguer la version finaleNous n'avons pas eu à parler de tests en vol sérieux, nous n'avions qu'un seul modèle fonctionnel, sa perte signifiait un échec.Le premier lancement a eu lieu à l'intérieur du bâtiment, il a réussi, le deuxième lancement dans la rue en mode manuel a réussi, le troisième lancement en mode gps hold a été presque fatal. En raison d'un magnétomètre mal réglé, la sonde a cessé d'obéir aux commandes et s'est envolée vers le lac le plus proche, car le mur de l'auberge l'a arrêté. Nous avons perdu 2 poutres et 2 hélices, le châssis a survécu. Nous avions des poutres de rechange, donc les performances ont été restaurées en quelques heures. Après une longue configuration du magnétomètre, il y a eu une autre tentative - le lancement a réussi.Il restait à vérifier le retour à la base. Cette journée était juste à mon diplôme, mais il n'y avait rien à faire, nous sommes allés sur le terrain, avons essayé de rentrer chez nous - avec succès. Il n'y avait pas de limite à la joie, le lendemain, nous sommes allés à Moscou pour les lancements, mais le code de divulgation automatique n'était toujours pas écrit, et il semble que nous ayons répété l'erreur de l'année dernière.test retour à la baseje vais vous en dire plus sur le système de divulgation automatique.Il se compose d'un servomoteur, d'une corde, de bandes élastiques, d'une carte de commande et d'un photodétecteur. La sonde est immergée dans une fusée, il fait sombre là-bas, à l'aide du photodétecteur MK qu'elle fixe, le système passe en mode veille. La fusée démarre, la séparation, le flux lumineux augmente, le servo libère la corde qui retient les rayons (leur état normal est dû aux élastiques ouverts), les rayons ouverts, après 3 secondes la planche donne accès au microcontrôleur de vol embarqué aux contrôleurs de vitesse, le vol au premier point commence, Vol de retour.Le conseil de gestion de la divulgation contrôle également la caméra infrarouge. Après avoir transféré le traitement des données brutes du capteur à l'ordinateur, la fréquence est passée de 18 ips à 30 ips (les données sont enregistrées sur microSD). Nous avons dû travailler dur pour contrôler les moteurs: vous ne pouvez pas simplement déconnecter la connexion entre le MK et les contrôleurs de vitesse en premier, puis restaurer - ils ne démarreront pas. Vous devez d'abord donner un signal pour initialiser et ensuite seulement donner accès au vol MK. Par conséquent, j'ai dû créer un schéma avec la possibilité d'accéder aux régulateurs à la fois du micron de vol et du gestionnaire.Nous passons en douceur à l'étape finale -
La sonde est immergée dans une fusée, il fait sombre là-bas, à l'aide du photodétecteur MK qu'elle fixe, le système passe en mode veille. La fusée démarre, la séparation, le flux lumineux augmente, le servo libère la corde qui retient les rayons (leur état normal est dû aux élastiques ouverts), les rayons ouverts, après 3 secondes la planche donne accès au microcontrôleur de vol embarqué aux contrôleurs de vitesse, le vol au premier point commence, Vol de retour.Le conseil de gestion de la divulgation contrôle également la caméra infrarouge. Après avoir transféré le traitement des données brutes du capteur à l'ordinateur, la fréquence est passée de 18 ips à 30 ips (les données sont enregistrées sur microSD). Nous avons dû travailler dur pour contrôler les moteurs: vous ne pouvez pas simplement déconnecter la connexion entre le MK et les contrôleurs de vitesse en premier, puis restaurer - ils ne démarreront pas. Vous devez d'abord donner un signal pour initialiser et ensuite seulement donner accès au vol MK. Par conséquent, j'ai dû créer un schéma avec la possibilité d'accéder aux régulateurs à la fois du micron de vol et du gestionnaire.Nous passons en douceur à l'étape finale -lance
Et il semble que la veille des lancements, tout est prêt, on a même testé le vol par points, ça vole vraiment, mais personne n'a pensé à faire une simulation complète. En conséquence, le bus qui nous a conduits au champ de lancement a révélé que le code ne fonctionnait pas correctement; J'ai invité un ami à commenter le cycle principal dans lequel le travail de tous les systèmes supplémentaires commence à déterminer la racine du problème. Nous avons essayé de corriger l'erreur tout le temps restant avant les lancements, a demandé aux organisateurs de nous laisser durer. En fin de compte, le problème a été résolu, mais, il s'est avéré que mon ami au lieu de commenter le cycle a défini un retour de «débogage», que personne n'a pris la peine de supprimer.La fusée, en l'occurrence, n'a pas pu élever la sonde du kilomètre déclaré, à seulement 500 mètres le lendemain, nous avons donc décidé de lancer sur l'hexacoptère. Pour simuler l'emplacement de la sonde dans une fusée, nous avons mis un capuchon sur le photodétecteur, et son autre extrémité a été attachée à un hexacoptère.Et donc l'hexacoptère se lève avec notre sonde oscillante, se transformant lentement en un endroit indiscernable; la sonde a été libérée par FPV par kilomètre, mais en raison de la faible résolution, il n'était pas clair si la divulgation s'était produite, quelqu'un a même dit qu'elle ne s'était pas ouverte et qu'elle était tombée avec une pierre (au départ, elle devait voler aux points donnés, puis revenir à lieu de départ, mais même après 5 minutes d'attente, personne ne l'a vu). Bien sûr, nous étions bouleversés et sommes allés chercher ses restes sur le terrain, mais, en regardant les dernières données de télémétrie, nous avons remarqué que, bien que la connexion avec la sonde ait disparu, les dernières coordonnées indiquent un champ voisin du panais de vache. Allons le long des coordonnées; en cours de route, une autre équipe a déclaré qu'elle l'avait vu s'asseoir dans les buissons; les recherches ont commencé. Il s'est avéré qu'il est extrêmement difficile de trouver une petite sonde dans l'herbe même en connaissant ses coordonnées.Finalement, j'ai décidé d'allumer les moteurs pour planter une batterie prétendument déchargée, puis j'ai dû nettoyer le voltmètre intégré. Le plan a fonctionné, nous l'avons trouvé sain et sauf, même les hélices n'ont pas souffert, grâce aux rayons allongés. Les joyeux sont rentrés chez eux pour traiter les données, ou plutôt, leur absence, grâce au retour "debug".Certes, nous avions des données du contrôleur de vol et les avons analysées. Vous avez une trajectoire, un graphique des hauteurs et des erreurs système.
Les joyeux sont rentrés chez eux pour traiter les données, ou plutôt, leur absence, grâce au retour "debug".Certes, nous avions des données du contrôleur de vol et les avons analysées. Vous avez une trajectoire, un graphique des hauteurs et des erreurs système.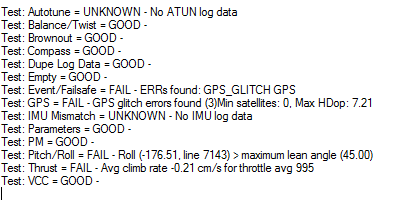
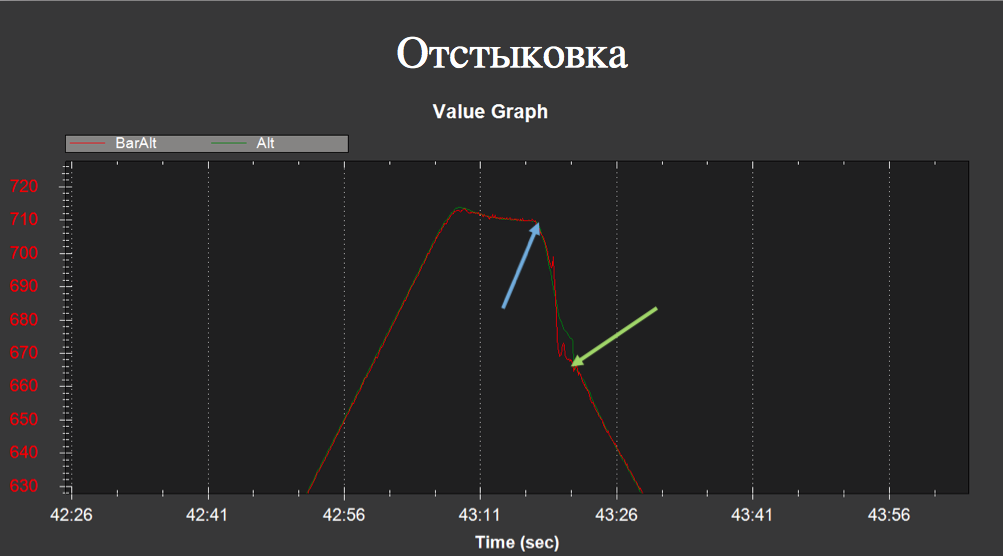 flèche bleue - le moment d'allumer les moteurs; flèche verte - le moment de l'inclusion du mode de retourà la maison.Nous avons également reçu un enregistrement de l'hexacoptère.Le résultat est qu'il s'est séparé avec succès, a libéré les rayons, a allumé les moteurs, a pu se stabiliser à partir d'une position inversée et s'est envolé vers le point le plus proche.
flèche bleue - le moment d'allumer les moteurs; flèche verte - le moment de l'inclusion du mode de retourà la maison.Nous avons également reçu un enregistrement de l'hexacoptère.Le résultat est qu'il s'est séparé avec succès, a libéré les rayons, a allumé les moteurs, a pu se stabiliser à partir d'une position inversée et s'est envolé vers le point le plus proche.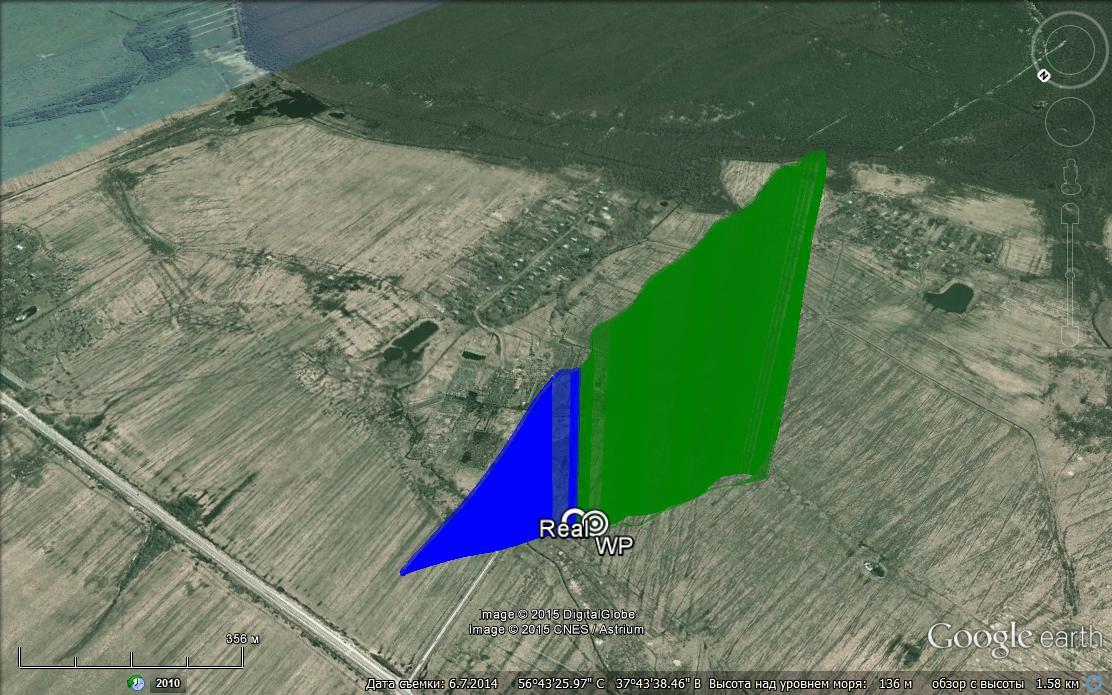 Puis il y a eu une perte de communication avec la station de base, c'est exactement le moment que je n'ai pas pris en compte. Dans les paramètres par défaut, on lui a demandé d'interrompre le vol par points et de rentrer chez lui, alors il a arrêté de descendre et s'est préparé à la base, mais voilà, nous avons allumé les moteurs trop rapidement, avant d'avoir eu le temps de «réchauffer» le GPS, donc il ne se souvenait pas tout à fait de ces coordonnées. , Je n'ai pas correctement enregistré le point de la maison (bien que la raison pour laquelle il se trouve sur une ligne droite le long de son chemin soit une question). Il a ensuite effectué un atterrissage en douceur en mode automatique et a coupé les moteurs.
Puis il y a eu une perte de communication avec la station de base, c'est exactement le moment que je n'ai pas pris en compte. Dans les paramètres par défaut, on lui a demandé d'interrompre le vol par points et de rentrer chez lui, alors il a arrêté de descendre et s'est préparé à la base, mais voilà, nous avons allumé les moteurs trop rapidement, avant d'avoir eu le temps de «réchauffer» le GPS, donc il ne se souvenait pas tout à fait de ces coordonnées. , Je n'ai pas correctement enregistré le point de la maison (bien que la raison pour laquelle il se trouve sur une ligne droite le long de son chemin soit une question). Il a ensuite effectué un atterrissage en douceur en mode automatique et a coupé les moteurs.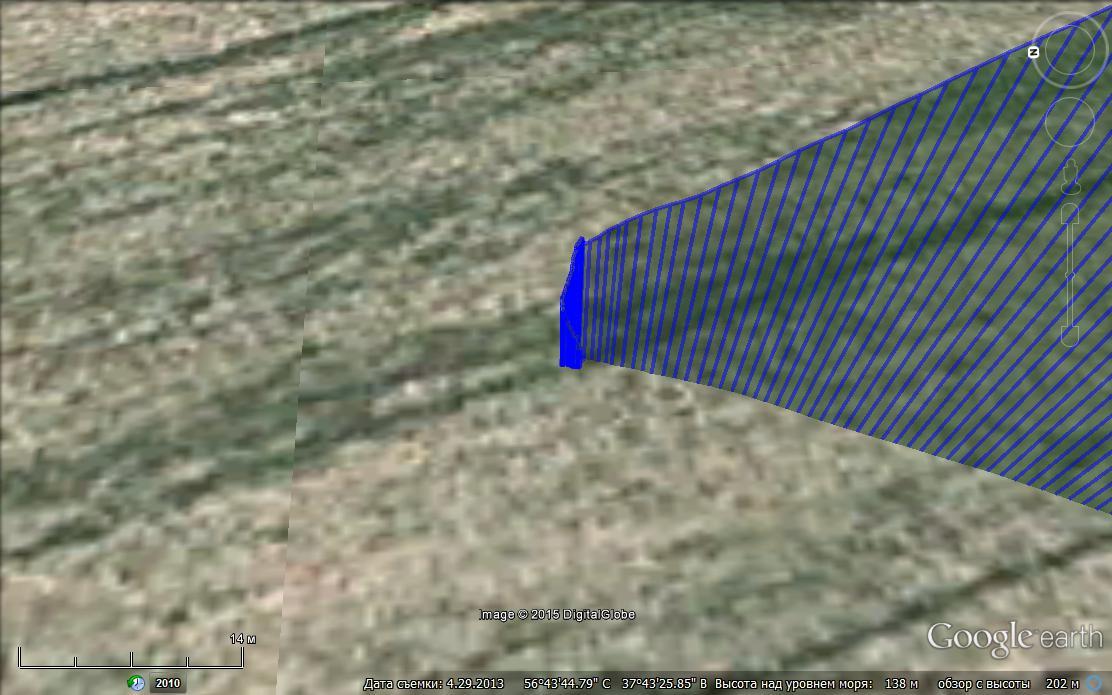 Après tant d'erreurs, nous n'espérions pas prendre la première place, mais le jury a semblé apprécier l'idée. Nous avons donc remporté le quatrième championnat CanSat en Russie.
Après tant d'erreurs, nous n'espérions pas prendre la première place, mais le jury a semblé apprécier l'idée. Nous avons donc remporté le quatrième championnat CanSat en Russie.PS
Je n'ai jamais trouvé un seul projet de travail sur la descente contrôlée de la sonde CanSat, peut-être que nous sommes les premiers, c'est même étrange, car tout était relativement simple.Références:
Ici vous pouvez lire sur le kansat de l'année dernière.Site officiel, si vous voulez participer,Le site du firmware que nous avons utilisé pour le vol autonomeÉpilogue?
- , , . , .
?
, , , .
?
300$ 500$, . , , , . , .
GPS ?
( ).