Brouillage dans les systèmes mondiaux de navigation par satellite. Continuation
À ma grande surprise, l' article précédent a été chaleureusement reçu. Aujourd'hui, nous poursuivons l'examen de cette question. Mesures anti-brouillageEn navigation, le niveau de bruit dépasse toujours le niveau du signal. Pour déterminer le niveau d'interférence (rapport interférence / signal, rapport J / S), on considère dans quelle mesure le bruit dépasse le niveau de bruit. Les méthodes suivantes permettent d'augmenter l'immunité au bruit des récepteurs, ainsi que les interférences maximales contre lesquelles ces méthodes sont efficaces.
Mesures anti-brouillageEn navigation, le niveau de bruit dépasse toujours le niveau du signal. Pour déterminer le niveau d'interférence (rapport interférence / signal, rapport J / S), on considère dans quelle mesure le bruit dépasse le niveau de bruit. Les méthodes suivantes permettent d'augmenter l'immunité au bruit des récepteurs, ainsi que les interférences maximales contre lesquelles ces méthodes sont efficaces. 1. L'augmentation de la largeur de bande du signal (jusqu'à 10 dB);2. Augmentation de la puissance d'émission de l'engin spatial (jusqu'à 20 dB);3. Intégration de récepteurs de navigation (jusqu'à 30 dB);4. L'utilisation de filtres matériels numériques (jusqu'à 40 dB);5. L'utilisation de la correction temps-fréquence (jusqu'à 50 dB);6. Utilisation de méthodes d'antenne (jusqu'à 70 dB);Les deux premières méthodes dépendent du signal utilisé par le vaisseau spatial et ne peuvent pas être modifiées depuis la Terre après le lancement. Les méthodes d'antenne compliquent considérablement et augmentent le coût des équipements grand public, ce qui réduit considérablement la gamme possible d'utilisateurs.
1. L'augmentation de la largeur de bande du signal (jusqu'à 10 dB);2. Augmentation de la puissance d'émission de l'engin spatial (jusqu'à 20 dB);3. Intégration de récepteurs de navigation (jusqu'à 30 dB);4. L'utilisation de filtres matériels numériques (jusqu'à 40 dB);5. L'utilisation de la correction temps-fréquence (jusqu'à 50 dB);6. Utilisation de méthodes d'antenne (jusqu'à 70 dB);Les deux premières méthodes dépendent du signal utilisé par le vaisseau spatial et ne peuvent pas être modifiées depuis la Terre après le lancement. Les méthodes d'antenne compliquent considérablement et augmentent le coût des équipements grand public, ce qui réduit considérablement la gamme possible d'utilisateurs. L'intégration des récepteurs de navigation n'augmente pas significativement l'immunité au bruit du récepteur de navigation. Cela est dû au fait que les systèmes de navigation inertielle (RNA) ne sont pas affectés par les interférences radio et ont une précision de mesure élevée à court terme. Cependant, l'erreur dans la détermination des paramètres de navigation s'accumule au fil du temps et nécessite une correction du GNSS. Le schéma ci-dessus montre où, à l'aide du filtre de Kalman, le récepteur de navigation est intégré.L'utilisation de la correction temps-fréquence (suppression des interférences dans le domaine fréquentiel) est une méthode efficace, mais elle est très difficile à mettre en œuvre en temps réel. En effet, l'exécution de cette méthode doit être effectuée à l'aide d'un micro-ordinateur en parallèle avec l'opération de suivi des boucles, des discriminateurs, la résolution des problèmes de navigation et de vitesse et la résolution des ambiguïtés lors du travail en mode RTK. Sur cette base, afin de pouvoir supprimer les interférences dans le domaine fréquentiel, il est nécessaire de disposer d'une importante réserve de puissance de calcul qui ne sera pas impliquée en l'absence d'interférences.Deux catégories sont distinguées parmi les filtres numériques:1. Filtres récursifs (avec réponse impulsionnelle infinie);2. Filtres non récursifs (à réponse impulsionnelle finie).Que choisir?La question du choix dépend fortement du matériel disponible. Les filtres numériques sont optimaux en termes de complexité de mise en œuvre et de coût du dispositif final. Dans les récepteurs de navigation, vous pouvez trouver des filtres IIR et FIR. Les filtres FIR ont l'avantage de pouvoir créer un filtre avec une réponse de phase linéaire et, par conséquent, un retard de groupe constant. Cela signifie que différentes composantes de fréquence seront retardées du même nombre de cycles d'horloge lors du passage à travers le filtre. Cependant, en utilisant un filtre IIR, une fenêtre d'encoche beaucoup plus étroite et une bande de transition généralement plus petite peuvent être obtenues avec le même ordre de filtre.Comment ça marche?Pour que les algorithmes de suppression des interférences fonctionnent, des informations sur l'environnement d'interférence sont nécessaires. La détection des interférences à bande étroite est effectuée de manière pratique dans le domaine fréquentiel, tandis que le comportement des pseudo-retards, du potentiel énergétique et du décalage Doppler pour le saut doit être analysé pour détecter les attaques d'usurpation.
L'intégration des récepteurs de navigation n'augmente pas significativement l'immunité au bruit du récepteur de navigation. Cela est dû au fait que les systèmes de navigation inertielle (RNA) ne sont pas affectés par les interférences radio et ont une précision de mesure élevée à court terme. Cependant, l'erreur dans la détermination des paramètres de navigation s'accumule au fil du temps et nécessite une correction du GNSS. Le schéma ci-dessus montre où, à l'aide du filtre de Kalman, le récepteur de navigation est intégré.L'utilisation de la correction temps-fréquence (suppression des interférences dans le domaine fréquentiel) est une méthode efficace, mais elle est très difficile à mettre en œuvre en temps réel. En effet, l'exécution de cette méthode doit être effectuée à l'aide d'un micro-ordinateur en parallèle avec l'opération de suivi des boucles, des discriminateurs, la résolution des problèmes de navigation et de vitesse et la résolution des ambiguïtés lors du travail en mode RTK. Sur cette base, afin de pouvoir supprimer les interférences dans le domaine fréquentiel, il est nécessaire de disposer d'une importante réserve de puissance de calcul qui ne sera pas impliquée en l'absence d'interférences.Deux catégories sont distinguées parmi les filtres numériques:1. Filtres récursifs (avec réponse impulsionnelle infinie);2. Filtres non récursifs (à réponse impulsionnelle finie).Que choisir?La question du choix dépend fortement du matériel disponible. Les filtres numériques sont optimaux en termes de complexité de mise en œuvre et de coût du dispositif final. Dans les récepteurs de navigation, vous pouvez trouver des filtres IIR et FIR. Les filtres FIR ont l'avantage de pouvoir créer un filtre avec une réponse de phase linéaire et, par conséquent, un retard de groupe constant. Cela signifie que différentes composantes de fréquence seront retardées du même nombre de cycles d'horloge lors du passage à travers le filtre. Cependant, en utilisant un filtre IIR, une fenêtre d'encoche beaucoup plus étroite et une bande de transition généralement plus petite peuvent être obtenues avec le même ordre de filtre.Comment ça marche?Pour que les algorithmes de suppression des interférences fonctionnent, des informations sur l'environnement d'interférence sont nécessaires. La détection des interférences à bande étroite est effectuée de manière pratique dans le domaine fréquentiel, tandis que le comportement des pseudo-retards, du potentiel énergétique et du décalage Doppler pour le saut doit être analysé pour détecter les attaques d'usurpation. Pour détecter les interférences, les fonctions de fenêtre doivent être utilisées en liaison avec ce que l'on appelle phénomène d'étalement du spectre. Étant donné que les brouilleurs peuvent être situés à différentes distances du récepteur, les interférences auront différents niveaux. Sans l'utilisation de fonctions de fenêtre, certaines interférences peuvent être masquées par les lobes latéraux d'une fenêtre rectangulaire, non détectées et non compensées.Quelques mots sur mon évolution
Pour détecter les interférences, les fonctions de fenêtre doivent être utilisées en liaison avec ce que l'on appelle phénomène d'étalement du spectre. Étant donné que les brouilleurs peuvent être situés à différentes distances du récepteur, les interférences auront différents niveaux. Sans l'utilisation de fonctions de fenêtre, certaines interférences peuvent être masquées par les lobes latéraux d'une fenêtre rectangulaire, non détectées et non compensées.Quelques mots sur mon évolution Ma tâche consistait à développer un suppresseur dans la structure existante du récepteur de navigation basé sur le VLSI 18791 fabriqué par le Centre scientifique et technique "Module". Si nous parlons brièvement de cette plate-forme matérielle et logicielle, nous pouvons distinguer:1. 4 ADC 12 bits avec une fréquence d'échantillonnage de 81,92 MHz;2. Le noyau d'ARM1176;3. 2 cœurs NeuroMatrix DSP avec un multiplicateur à matrice vectorielle capable de paralléliser avec succès des opérations avec des valeurs de bits faibles;4. Unité de prétraitement du signal matériel (BPOS).
Ma tâche consistait à développer un suppresseur dans la structure existante du récepteur de navigation basé sur le VLSI 18791 fabriqué par le Centre scientifique et technique "Module". Si nous parlons brièvement de cette plate-forme matérielle et logicielle, nous pouvons distinguer:1. 4 ADC 12 bits avec une fréquence d'échantillonnage de 81,92 MHz;2. Le noyau d'ARM1176;3. 2 cœurs NeuroMatrix DSP avec un multiplicateur à matrice vectorielle capable de paralléliser avec succès des opérations avec des valeurs de bits faibles;4. Unité de prétraitement du signal matériel (BPOS).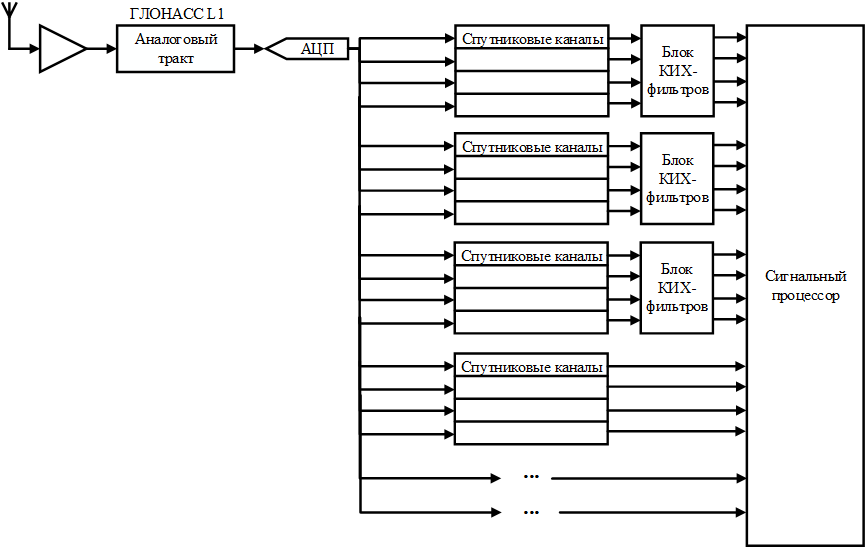 Le reste des détails peut être trouvé sur le site, maintenant nous allons accorder plus d'attention à BPOS. Le circuit récepteur général est donné ci-dessus. Il contient une antenne, un chemin analogique (par exemple, GLONASS L1, mais maintenant ça n'a plus d'importance), un ADC, des canaux numériques et un processeur de signal. BPOS contient 24 canaux numériques, dont 12 ont accès à trois blocs de filtres FIR. Chaque bloc contient 4 filtres FIR de 64e ordre avec des coefficients de 8 bits. À l'intérieur d'une unité, les filtres peuvent être commutés en série ou en parallèle pour mettre en œuvre de un à quatre suppresseurs. Les canaux numériques contiennent un oscillateur local numérique, un filtre passe-bas, un décimateur (pour abaisser la fréquence d'échantillonnage), ainsi qu'un normalisateur. Dans le processeur de signal (NeuroMatrix, pas ARM), les algorithmes de détection des interférences, de calcul des coefficients des filtres matériels,traitement de corrélation et boucles de suivi (FAP et CVD).En utilisant un filtre de 128e ordre avec des coefficients de 16 bits, le récepteur a pu atteindre l'opérabilité sous l'influence d'une interférence à bande étroite avec une puissance de 67 dB située dans le lobe principal du spectre du signal.Je me ferai un plaisir de répondre aux questions dans les commentaires ou, s'il y en a un nombre important, j'écrirai la troisième partie de l'article. Merci de votre attention.Unepetite miseà jour.J'ai complètement oublié d'apporter deux des photos les plus intéressantes. Vous trouverez ci-dessous le spectre du signal de navigation en présence d'interférences à bande étroite avant et après avoir traversé le filtre développé:
Le reste des détails peut être trouvé sur le site, maintenant nous allons accorder plus d'attention à BPOS. Le circuit récepteur général est donné ci-dessus. Il contient une antenne, un chemin analogique (par exemple, GLONASS L1, mais maintenant ça n'a plus d'importance), un ADC, des canaux numériques et un processeur de signal. BPOS contient 24 canaux numériques, dont 12 ont accès à trois blocs de filtres FIR. Chaque bloc contient 4 filtres FIR de 64e ordre avec des coefficients de 8 bits. À l'intérieur d'une unité, les filtres peuvent être commutés en série ou en parallèle pour mettre en œuvre de un à quatre suppresseurs. Les canaux numériques contiennent un oscillateur local numérique, un filtre passe-bas, un décimateur (pour abaisser la fréquence d'échantillonnage), ainsi qu'un normalisateur. Dans le processeur de signal (NeuroMatrix, pas ARM), les algorithmes de détection des interférences, de calcul des coefficients des filtres matériels,traitement de corrélation et boucles de suivi (FAP et CVD).En utilisant un filtre de 128e ordre avec des coefficients de 16 bits, le récepteur a pu atteindre l'opérabilité sous l'influence d'une interférence à bande étroite avec une puissance de 67 dB située dans le lobe principal du spectre du signal.Je me ferai un plaisir de répondre aux questions dans les commentaires ou, s'il y en a un nombre important, j'écrirai la troisième partie de l'article. Merci de votre attention.Unepetite miseà jour.J'ai complètement oublié d'apporter deux des photos les plus intéressantes. Vous trouverez ci-dessous le spectre du signal de navigation en présence d'interférences à bande étroite avant et après avoir traversé le filtre développé: ainsi que la sortie du filtre adapté pour ces spectres:
ainsi que la sortie du filtre adapté pour ces spectres: Comme vous pouvez le voir, en présence d'interférences à bande étroite, le pic de corrélation ne peut pas être distingué dans la sortie du corrélateur.Il convient également de noter que le filtre a une caractéristique, à savoir le retard du groupe d'insertion égal à la moitié de la taille du filtre. Cette valeur est prise en compte dans la solution ultérieure du problème de navigation et, de ce fait, est entièrement compensée.
Comme vous pouvez le voir, en présence d'interférences à bande étroite, le pic de corrélation ne peut pas être distingué dans la sortie du corrélateur.Il convient également de noter que le filtre a une caractéristique, à savoir le retard du groupe d'insertion égal à la moitié de la taille du filtre. Cette valeur est prise en compte dans la solution ultérieure du problème de navigation et, de ce fait, est entièrement compensée. Source: https://habr.com/ru/post/fr389203/
All Articles