Contrôle vectoriel pour moteur asynchrone à doigts
 Dans l'article précédent, "Contrôle vectoriel du moteur électrique" sur les doigts " , un système de contrôle vectoriel pour les moteurs synchrones a été envisagé. L'article s'est avéré être un gros, donc la question sur les moteurs à induction a été posée dans une publication séparée. Cet article est une continuation du précédent et se base sur les explications des principes de fonctionnement des moteurs électriques qui y sont données. Elle parlera des caractéristiques du moteur asynchrone par rapport au contrôle vectoriel et montrera également les différences dans la structure du système de contrôle vectoriel entre les machines synchrones et asynchrones.Comment fonctionne un moteur à induction? L'explication la plus populaire dit quelque chose comme "le stator crée un champ magnétique rotatif qui induit un champ électromagnétique dans le rotor, ce qui fait que les courants y circulent, en conséquence, le rotor est emporté par le champ du stator et commence à tourner". Personnellement, à partir d'une telle explication, je ne commence pas à comprendre toute la physique du processus, alors expliquons-le différemment, "sur les doigts".Vous avez encore vu une vidéo de la façon dont un aimant interagit avec un cylindre en cuivre? Faites particulièrement attention à la plage de temps de 0:49 à 1:03 - c'est un vrai moteur asynchrone:L'effet est dû à l'apparition de courants de Foucault dans le cylindre. Selon la loi de l'induction électromagnétique , découverte par Michael Faraday, lorsque le flux magnétique d'un circuit fermé change, un CEM se produit en lui (supposons simplement que la tension). Cet EMF, appliqué à un cylindre en cuivre, fait immédiatement apparaître un courant dans le cylindre. Dans le même temps, ce courant crée également son propre flux magnétique de réponse dirigé exactement dans la direction opposée à la variation du flux magnétique que nous apportons: lecourant d'induction qui se produit dans un circuit conducteur fermé a une direction telle que le champ magnétique créé par lui contrebalance cette variation du flux magnétique, qui a provoqué ce courant.Cela peut être compris de sorte que la boucle fermée résiste au changement du flux magnétique en elle-même. Si vous amenez brusquement l'aimant au cylindre de cuivre, c.-à-d. effectuer un changement brusque dans le flux magnétique, puis les courants de réponse circuleront dans le cylindre de sorte que le champ magnétique à l'intérieur du cylindre au premier instant sera nul: le champ magnétique de l'aimant élevé sera complètement compensé par le champ magnétique des courants du cylindre (avec des hypothèses, bien sûr). Si vous maintenez et maintenez l'aimant, les courants dans le cylindre diminueront progressivement en raison de la présence de résistance au cuivre, et le champ du cylindre créé par ses courants disparaîtra: le flux magnétique de l'aimant permanent "éclatera" dans le cylindre, comme s'il n'y avait pas de cylindre. Mais cela vaut la peine d'essayer de retirer l'aimant,comment le cylindre va réagir à nouveau - maintenant, il va essayer de "recréer" le flux magnétique perdu à l'intérieur de lui-même, c'est-à-dire résistera à nouveau à un changement de flux magnétique, dans ce cas, à sa disparition. Mais que signifie recréer un flux magnétique? Cela signifie que pendant un certain temps, un cylindre en cuivre peut être considéré conventionnellement comme un «aimant permanent» - un courant de Foucault y circule, créant un champ magnétique (les supraconducteurs dans un champ magnétique «pendent» sur le même principe, mais c'est une histoire complètement différente).mais c'est une histoire complètement différente).mais c'est une histoire complètement différente).Passons maintenant à la conception d'un moteur à induction. Le rotor d'un moteur à induction peut également être imaginé sous la forme d'un cylindre en cuivre. Mais dans les constructions réelles, il s'agit d'un certain réseau en forme de «cage d'écureuil» (figure 1) en cuivre ou en aluminium, combiné à un circuit magnétique (fer doublé).Figure 1. Le rotor d'un moteur à induction de type cage d'écureuil avec du courant dans l'un des «cadres» de cage d'écureuil qui réagit à une augmentation d'un champ magnétique externe.La figure montre schématiquement le flux de courant dans l'un des "cadres", c'est-à-dire dans certaines barres d'une cage d'écureuil, si vous amenez un aimant d'en haut (créez un courant dans le stator). En fait, le courant dans ce cas circule dans toutes les tiges, à l'exception, conditionnellement, du haut et du bas, pour lesquelles il n'y a pas de changement dans le flux (mais elles réagiraient à un aimant présenté horizontalement).Rappelez-vous depuis le début du dernier articleune image avec une illustration schématique d'une machine synchrone biphasée, où était l'aimant du rotor? Faisons maintenant un moteur à induction: au lieu d'un aimant, nous allons mettre deux bobines perpendiculaires en court-circuit, symbolisant le cylindre de cuivre du rotor (figure 2).Figure 2. Représentation schématique d'un moteur à induction à cage d'écureuil biphasé.Le remplacement d'un cylindre par deux bobines pour expliquer le principe de fonctionnement (ou de modélisation) est correct, tout comme il est correct de remplacer un enroulement triphasé par un enroulement biphasé. Ce n'est que dans ce cas que nous remplaçons ... "l'enroulement de phase infinie" du cylindre (un nombre infini de cadres) par deux bobines d'inductance et de résistance équivalentes. Après tout, avec deux bobines, vous pouvez créer exactement le même vecteur de courant et de flux magnétique qu'un cylindre.Et maintenant, faisons un peu de temps sur une machine asynchrone synchrone. Nous alimentons l'axe β dans la bobinecourant continu et attendez deux ou trois secondes jusqu'à ce que les courants de réponse cessent de circuler dans le rotor: «nous allons faire monter un aimant externe». C'est-à-dire que nous attendons que les courants tombent dans le rotor pour que le champ magnétique du stator "perce le rotor" et que personne n'y interfère. Que se passera-t-il maintenant si vous coupez le courant dans le stator? C'est vrai, pendant les mêmes deux ou trois secondes, alors que le courant du rotor s'y oppose, nous obtiendrons un «aimant ordinaire» du rotor (figure 3).Figure 3. Moteur asynchrone, lorsque le courant continu en phase β vient d'être coupé, le courant circule dans le rotor i rd .Qu'attendons-nous? Plus rapidement, jusqu'à ce que l'aimant ait disparu, nous dessinons le long de lui l'axe familier d (comme dans une machine synchrone) et l'axe q perpendiculaire à celui - ci , attachés au rotor. Nous activons la structure du contrôle vectoriel de la machine synchrone, appliquons le courant le long de l'axe q , créant un moment, c'est parti!Ainsi, vous pouvez même vraiment faire quelques révolutions jusqu'à ce que notre aimant à sucre ait fondu et l'axe dpas entré dans l'oubli. Que faire? Ne coupons pas le courant le long de l'axe d, alimentant notre aimant! Et encore une fois, sauvegardons la structure de contrôle vectoriel de la machine synchrone, simplement en soumettant la tâche le long de l'axe d (il y avait auparavant zéro). Donc, nous regardons la figure 4: les axes d , q sont «attachés» au rotor par le capteur de position, le moteur est debout, le courant le long de l'axe d dans le stator est appliqué , ce qui coïncide dans ce cas avec l'axe β pour une machine debout . Il n'y a pas de courant le long de l'axe q : on attend que le rotor se «magnétise». Et maintenant, nous alimentons le courant i sq (s - stator)! C'est parti!Figure 4. Nous appliquons du courant à l'axe d , magnétisons la machine, préparons tout pour fournir du courant à l'axe du stator q .Jusqu'où irons-nous avec cette méthode du baron Munchausen? Malheureusement non. Voyez ce qui s'est passé (figure 5):Figure 5. Un aimant a glissé!Le moteur a commencé à tourner, mais quelque temps après avoir appliqué du courant à l'axe q , formant le courant total i s et «cloué» ce vecteur à la position du rotor, l'aimant dans le rotor «s'est déplacé»! Et se tenait exactement le long du vecteur i s . Le rotor ne comprend pas où nous avons tracé les axes d , q ... Peu lui importe qu'il tourne ou non. Il est important que son «aimant induit» interne veuille à terme devenir co-dirigé avec le flux magnétique du stator, pour «obéir» au flux externe. En raison de l'aimant qui s'est déplacé, le moteur s'arrête de tourner: non seulement entre l'aimant du rotor et le courant i q, il n'y a pas de 90 degrés souhaités, il y a aussi un courant d'axed le tire maintenant dans la direction opposée, compensant le moment créé par le courant i q . La méthode du baron Munchausen a échoué.Que faire avec un aimant de rotor insaisissable? Et faisons la structure de contrôle vectoriel du moteur à induction non pas dans les axes d , q attachés au rotor, mais dans d'autres axes attachés exactement à la position actuelle de «l'aimant du rotor» - appelons-les les axes x , y pour les distinguer de d , q. Selon le «scientifique», ce sont des axes orientés le long de la liaison du flux rotorique. Mais comment savez-vous où se trouve maintenant exactement la liaison de flux du rotor, c.-à-d. où l'aimant du rotor est-il tourné? Sa position dépend ... d'une part, de la position du rotor lui-même (nous avons un capteur de position, enfin), d'autre part, des courants statoriques (créant un courant statorique, que l'aimant du rotor va éventuellement tourner), et troisièmement des paramètres de la chaîne du rotor - l'inductance et la résistance du "cylindre de cuivre" (c'est une cage d'écureuil, c'est l'enroulement du rotor, c'est la chaîne du rotor). Par conséquent ... sachant tout cela, la position de «l'aimant» du rotor peut simplement être calculée à l'aide de plusieurs équations différentielles. Cela se fait par le soi-disant observateur de liaison de flux de rotor, mis en évidence en couleur sur le diagramme structurel final de la commande vectorielle d'un moteur asynchrone (figure 6).
Dans l'article précédent, "Contrôle vectoriel du moteur électrique" sur les doigts " , un système de contrôle vectoriel pour les moteurs synchrones a été envisagé. L'article s'est avéré être un gros, donc la question sur les moteurs à induction a été posée dans une publication séparée. Cet article est une continuation du précédent et se base sur les explications des principes de fonctionnement des moteurs électriques qui y sont données. Elle parlera des caractéristiques du moteur asynchrone par rapport au contrôle vectoriel et montrera également les différences dans la structure du système de contrôle vectoriel entre les machines synchrones et asynchrones.Comment fonctionne un moteur à induction? L'explication la plus populaire dit quelque chose comme "le stator crée un champ magnétique rotatif qui induit un champ électromagnétique dans le rotor, ce qui fait que les courants y circulent, en conséquence, le rotor est emporté par le champ du stator et commence à tourner". Personnellement, à partir d'une telle explication, je ne commence pas à comprendre toute la physique du processus, alors expliquons-le différemment, "sur les doigts".Vous avez encore vu une vidéo de la façon dont un aimant interagit avec un cylindre en cuivre? Faites particulièrement attention à la plage de temps de 0:49 à 1:03 - c'est un vrai moteur asynchrone:L'effet est dû à l'apparition de courants de Foucault dans le cylindre. Selon la loi de l'induction électromagnétique , découverte par Michael Faraday, lorsque le flux magnétique d'un circuit fermé change, un CEM se produit en lui (supposons simplement que la tension). Cet EMF, appliqué à un cylindre en cuivre, fait immédiatement apparaître un courant dans le cylindre. Dans le même temps, ce courant crée également son propre flux magnétique de réponse dirigé exactement dans la direction opposée à la variation du flux magnétique que nous apportons: lecourant d'induction qui se produit dans un circuit conducteur fermé a une direction telle que le champ magnétique créé par lui contrebalance cette variation du flux magnétique, qui a provoqué ce courant.Cela peut être compris de sorte que la boucle fermée résiste au changement du flux magnétique en elle-même. Si vous amenez brusquement l'aimant au cylindre de cuivre, c.-à-d. effectuer un changement brusque dans le flux magnétique, puis les courants de réponse circuleront dans le cylindre de sorte que le champ magnétique à l'intérieur du cylindre au premier instant sera nul: le champ magnétique de l'aimant élevé sera complètement compensé par le champ magnétique des courants du cylindre (avec des hypothèses, bien sûr). Si vous maintenez et maintenez l'aimant, les courants dans le cylindre diminueront progressivement en raison de la présence de résistance au cuivre, et le champ du cylindre créé par ses courants disparaîtra: le flux magnétique de l'aimant permanent "éclatera" dans le cylindre, comme s'il n'y avait pas de cylindre. Mais cela vaut la peine d'essayer de retirer l'aimant,comment le cylindre va réagir à nouveau - maintenant, il va essayer de "recréer" le flux magnétique perdu à l'intérieur de lui-même, c'est-à-dire résistera à nouveau à un changement de flux magnétique, dans ce cas, à sa disparition. Mais que signifie recréer un flux magnétique? Cela signifie que pendant un certain temps, un cylindre en cuivre peut être considéré conventionnellement comme un «aimant permanent» - un courant de Foucault y circule, créant un champ magnétique (les supraconducteurs dans un champ magnétique «pendent» sur le même principe, mais c'est une histoire complètement différente).mais c'est une histoire complètement différente).mais c'est une histoire complètement différente).Passons maintenant à la conception d'un moteur à induction. Le rotor d'un moteur à induction peut également être imaginé sous la forme d'un cylindre en cuivre. Mais dans les constructions réelles, il s'agit d'un certain réseau en forme de «cage d'écureuil» (figure 1) en cuivre ou en aluminium, combiné à un circuit magnétique (fer doublé).Figure 1. Le rotor d'un moteur à induction de type cage d'écureuil avec du courant dans l'un des «cadres» de cage d'écureuil qui réagit à une augmentation d'un champ magnétique externe.La figure montre schématiquement le flux de courant dans l'un des "cadres", c'est-à-dire dans certaines barres d'une cage d'écureuil, si vous amenez un aimant d'en haut (créez un courant dans le stator). En fait, le courant dans ce cas circule dans toutes les tiges, à l'exception, conditionnellement, du haut et du bas, pour lesquelles il n'y a pas de changement dans le flux (mais elles réagiraient à un aimant présenté horizontalement).Rappelez-vous depuis le début du dernier articleune image avec une illustration schématique d'une machine synchrone biphasée, où était l'aimant du rotor? Faisons maintenant un moteur à induction: au lieu d'un aimant, nous allons mettre deux bobines perpendiculaires en court-circuit, symbolisant le cylindre de cuivre du rotor (figure 2).Figure 2. Représentation schématique d'un moteur à induction à cage d'écureuil biphasé.Le remplacement d'un cylindre par deux bobines pour expliquer le principe de fonctionnement (ou de modélisation) est correct, tout comme il est correct de remplacer un enroulement triphasé par un enroulement biphasé. Ce n'est que dans ce cas que nous remplaçons ... "l'enroulement de phase infinie" du cylindre (un nombre infini de cadres) par deux bobines d'inductance et de résistance équivalentes. Après tout, avec deux bobines, vous pouvez créer exactement le même vecteur de courant et de flux magnétique qu'un cylindre.Et maintenant, faisons un peu de temps sur une machine asynchrone synchrone. Nous alimentons l'axe β dans la bobinecourant continu et attendez deux ou trois secondes jusqu'à ce que les courants de réponse cessent de circuler dans le rotor: «nous allons faire monter un aimant externe». C'est-à-dire que nous attendons que les courants tombent dans le rotor pour que le champ magnétique du stator "perce le rotor" et que personne n'y interfère. Que se passera-t-il maintenant si vous coupez le courant dans le stator? C'est vrai, pendant les mêmes deux ou trois secondes, alors que le courant du rotor s'y oppose, nous obtiendrons un «aimant ordinaire» du rotor (figure 3).Figure 3. Moteur asynchrone, lorsque le courant continu en phase β vient d'être coupé, le courant circule dans le rotor i rd .Qu'attendons-nous? Plus rapidement, jusqu'à ce que l'aimant ait disparu, nous dessinons le long de lui l'axe familier d (comme dans une machine synchrone) et l'axe q perpendiculaire à celui - ci , attachés au rotor. Nous activons la structure du contrôle vectoriel de la machine synchrone, appliquons le courant le long de l'axe q , créant un moment, c'est parti!Ainsi, vous pouvez même vraiment faire quelques révolutions jusqu'à ce que notre aimant à sucre ait fondu et l'axe dpas entré dans l'oubli. Que faire? Ne coupons pas le courant le long de l'axe d, alimentant notre aimant! Et encore une fois, sauvegardons la structure de contrôle vectoriel de la machine synchrone, simplement en soumettant la tâche le long de l'axe d (il y avait auparavant zéro). Donc, nous regardons la figure 4: les axes d , q sont «attachés» au rotor par le capteur de position, le moteur est debout, le courant le long de l'axe d dans le stator est appliqué , ce qui coïncide dans ce cas avec l'axe β pour une machine debout . Il n'y a pas de courant le long de l'axe q : on attend que le rotor se «magnétise». Et maintenant, nous alimentons le courant i sq (s - stator)! C'est parti!Figure 4. Nous appliquons du courant à l'axe d , magnétisons la machine, préparons tout pour fournir du courant à l'axe du stator q .Jusqu'où irons-nous avec cette méthode du baron Munchausen? Malheureusement non. Voyez ce qui s'est passé (figure 5):Figure 5. Un aimant a glissé!Le moteur a commencé à tourner, mais quelque temps après avoir appliqué du courant à l'axe q , formant le courant total i s et «cloué» ce vecteur à la position du rotor, l'aimant dans le rotor «s'est déplacé»! Et se tenait exactement le long du vecteur i s . Le rotor ne comprend pas où nous avons tracé les axes d , q ... Peu lui importe qu'il tourne ou non. Il est important que son «aimant induit» interne veuille à terme devenir co-dirigé avec le flux magnétique du stator, pour «obéir» au flux externe. En raison de l'aimant qui s'est déplacé, le moteur s'arrête de tourner: non seulement entre l'aimant du rotor et le courant i q, il n'y a pas de 90 degrés souhaités, il y a aussi un courant d'axed le tire maintenant dans la direction opposée, compensant le moment créé par le courant i q . La méthode du baron Munchausen a échoué.Que faire avec un aimant de rotor insaisissable? Et faisons la structure de contrôle vectoriel du moteur à induction non pas dans les axes d , q attachés au rotor, mais dans d'autres axes attachés exactement à la position actuelle de «l'aimant du rotor» - appelons-les les axes x , y pour les distinguer de d , q. Selon le «scientifique», ce sont des axes orientés le long de la liaison du flux rotorique. Mais comment savez-vous où se trouve maintenant exactement la liaison de flux du rotor, c.-à-d. où l'aimant du rotor est-il tourné? Sa position dépend ... d'une part, de la position du rotor lui-même (nous avons un capteur de position, enfin), d'autre part, des courants statoriques (créant un courant statorique, que l'aimant du rotor va éventuellement tourner), et troisièmement des paramètres de la chaîne du rotor - l'inductance et la résistance du "cylindre de cuivre" (c'est une cage d'écureuil, c'est l'enroulement du rotor, c'est la chaîne du rotor). Par conséquent ... sachant tout cela, la position de «l'aimant» du rotor peut simplement être calculée à l'aide de plusieurs équations différentielles. Cela se fait par le soi-disant observateur de liaison de flux de rotor, mis en évidence en couleur sur le diagramme structurel final de la commande vectorielle d'un moteur asynchrone (figure 6).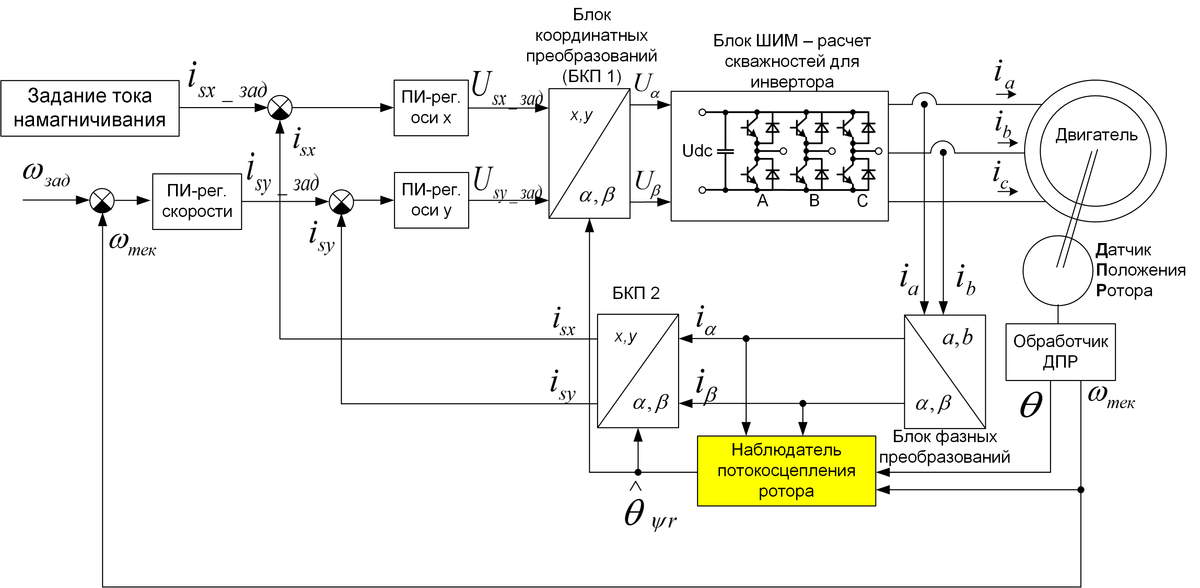
 . Sinon, la structure est complètement similaire à celle d'une machine synchrone, seuls les axes d , q sont renommés x , y et l'axe x reçoit une spécification actuelle qui soutiendra notre «aimant» dans le rotor. De plus, le « s»Pour montrer que cette valeur se rapporte au stator et non au rotor. Il convient également de noter que dans la littérature occidentale, ils n'utilisent pas les axes x , y : pour eux, l'axe d est toujours dirigé le long du champ du rotor, qui est pour un moteur asynchrone, et pour un moteur synchrone. Même à l'époque soviétique, nos scientifiques ont séparé les axes d , q et x , y , afin d'éviter toute confusion: d , q sont attachés au rotor et x , y sont attachés au champ du rotor .Qu'est-ce qui se passe? L'aimant du rotor glisse tout le temps, glisse de la position actuelle du rotor vers le courant de l'axe y. Plus ce courant est important, plus le glissement est fort. L'observateur en temps réel calcule la position de cet aimant et «tord» les axes x , y tout le temps vers l'avant par rapport aux axes d , q (position du rotor). L'axe des x correspond toujours à la position actuelle de la liaison de flux dans le rotor - la position de «l'aimant». C'est-à-dire axe x , ytoujours tourner (en mode moteur) un peu plus vite que la rotation du rotor, compensant le glissement en lui. Les courants dans le rotor, s'ils sont mesurés ou modélisés, sont sinusoïdaux. Seulement, ils ne changent pas avec la fréquence des courants statoriques, mais avec la fréquence de ce glissement, c'est-à-dire très lentement. Si le stator de l'asynchrone industriel est de 50 Hz, alors lorsque vous travaillez sous charge, la fréquence actuelle dans le rotor est en unités de hertz. C'est en fait tout le secret de la commande vectorielle pour un moteur à induction.Comment le contrôle vectoriel d'un moteur à induction est-il meilleur que scalaire? Le contrôle scalaire est tel lorsqu'une tension d'une fréquence et d'une amplitude données est appliquée au moteur - par exemple, 380 V 50 Hz. Et cela ne dépend pas de la charge sur le rotor - pas de contrôleurs de courant et de vecteur ... La fréquence de tension et son amplitude sont juste définies - des quantités scalaires, et permettent aux courants et aux flux dans le moteur de trouver un endroit pratique pour eux comme ils le souhaitent. Dans le fonctionnement du moteur en régime permanent, la commande vectorielle ne peut pas être distinguée de la commande scalaire - la commande vectorielle appliquera également la même chose, disons 380 V, 50 Hz à la charge nominale. Mais dans des conditions transitoires ... si vous devez démarrer rapidement le moteur à un moment donné, si vous avez besoin d'élaborer un diagramme de mouvement, s'il y a une charge d'impulsion,si vous avez besoin de faire un mode générateur avec un certain niveau de puissance, toute cette commande scalaire ne peut pas le faire, ou le fait avec des transitoires lents et dégoûtants, qui peuvent également "assommer" le convertisseur de fréquence en dépassant le courant ou la tension du circuit intermédiaire (moteur oscille et peut passer en mode générateur auquel le convertisseur de fréquence n'est pas toujours adapté).Dans la structure vectorielle, "tout est sous contrôle". Au moment où vous vous fixez, le flux aussi. Vous pouvez les limiter au bon niveau afin de ne pas dépasser les paramètres de protection. Il est possible de forcer les courants de manière contrôlée, si pendant un court laps de temps il est nécessaire de faire un moment plusieurs fois plus grand. Il est possible de réguler non seulement le couple du moteur, mais aussi le débit (courant sur l'axe des x ): si la charge sur le moteur est faible, il est inutile de maintenir le plein débit dans le rotor (en faisant un aimant de «mode nominal») - vous pouvez l'affaiblir, réduire les pertes. Il est possible de stabiliser la vitesse avec un contrôleur de vitesse avec une précision et une vitesse élevées. Vous pouvez utiliser un entraînement asynchrone comme entraînement de traction (en transport), en définissant le moment de traction requis. En général, pour les applications complexes avec fonctionnement moteur dynamique, la commande vectorielle d'un moteur à induction est indispensable.Il existe également des caractéristiques distinctives de la commande vectorielle d'un moteur asynchrone par rapport à un moteur synchrone. Le premier est le capteur de position. Si, pour un entraînement synchrone, nous devons connaître la position absolue du rotor afin de comprendre où se trouve l'aimant, cela n'est pas requis dans un entraînement asynchrone. Le rotor n'a pas de structure polaire prononcée, l'aimant glisse constamment et si vous regardez les formules de l'observateur de liaison du flux du rotor, vous n'avez pas besoin de connaître la position: seule la vitesse du rotor est incluse dans les formules (en fait, il existe différentes formules, mais généralement ainsi). Par conséquent, vous pouvez économiser sur le capteur: un codeur incrémental conventionnel suffit pour suivre la vitesse (ou même un générateur tachymétrique), les capteurs de position absolue ne sont pas nécessaires. La deuxième caractéristique est le contrôle du débit dans un moteur à induction.Dans une machine synchrone à aimants permanents, le débit n'est pas régulé, ce qui limite la vitesse maximale du moteur: la tension sur l'onduleur cesse d'être suffisante. Dans un moteur à induction, lorsque cela se produit ... il suffit de diminuer la référence d'axex et continuez! La fréquence maximale est illimitée! Oui, le couple moteur diminuera à partir de cela, mais, surtout, vous pouvez «monter», contrairement à une machine synchrone (en vérité, c'est également possible là-bas, mais pas loin, pas pour tous les moteurs et avec beaucoup de problèmes).De même, il existe des algorithmes de contrôle vectoriel sans capteur pour un moteur à induction qui estiment l'angle de flux du rotor sans utiliser le signal du capteur de position (ou de vitesse) de l'arbre du rotor. De la même manière que pour les machines synchrones, il y a des problèmes dans le fonctionnement de tels systèmes à faible vitesse de rotor, où le moteur EMF est petit.Vous devriez également dire quelques mots sur le rotor. Si pour les moteurs asynchrones industriels, il est bon marché à l'aide d'une cage d'écureuil en aluminium, puis en traction, où les indicateurs de poids et de taille sont plus importants, au contraire, ils peuvent utiliser un cylindre en cuivre. Ainsi, dans tous vos véhicules électriques Tesla préférés, il y a précisément un moteur électrique asynchrone avec un rotor en cuivre (figure 7)Figure 7. Rotor de moteur électrique asynchrone Tesla Model S dans un revêtement en acier (photo provenant de diverses sources pour différentes années)C'est en fait tout ce que je voulais dire sur le moteur asynchrone. Dans cet article de revue, de nombreuses subtilités n'ont pas été prises en compte, telles que le régulateur de débit du rotor, la construction possible d'une structure vectorielle dans d'autres axes de coordonnées, les mathématiques de l'observateur de liaison de flux de rotor, et bien plus encore. Comme à la fin du dernier article, pour plus de détails, je renvoie le lecteur à des livres modernes sur le variateur, par exemple, «Anuchin A. S. Electric drive control systems. MEI, 2015 " .Sur quel microcontrôleur vous pouvez effectuer un contrôle vectoriel à part entière, lisez, par exemple, l'article «Nouveau microcontrôleur domestique de contrôle moteur K1921VK01T de OJSC« NIIET », et comment le déboguer dans l'article «Méthodes de débogage du logiciel du microcontrôleur dans un lecteur électrique» . Notre société LLC NPF Vector propose également le développement de systèmes de contrôle sur mesure pour les moteurs électriques et autres équipements électriques, des exemples de projets achevés peuvent être consultés sur notre site Web .PSJe m'excuse auprès des spécialistes pour le traitement pas tout à fait correct avec certains termes, en particulier avec les termes "flux", "liaison de flux", "champ magnétique" et d'autres - la simplicité nécessite un sacrifice ...
. Sinon, la structure est complètement similaire à celle d'une machine synchrone, seuls les axes d , q sont renommés x , y et l'axe x reçoit une spécification actuelle qui soutiendra notre «aimant» dans le rotor. De plus, le « s»Pour montrer que cette valeur se rapporte au stator et non au rotor. Il convient également de noter que dans la littérature occidentale, ils n'utilisent pas les axes x , y : pour eux, l'axe d est toujours dirigé le long du champ du rotor, qui est pour un moteur asynchrone, et pour un moteur synchrone. Même à l'époque soviétique, nos scientifiques ont séparé les axes d , q et x , y , afin d'éviter toute confusion: d , q sont attachés au rotor et x , y sont attachés au champ du rotor .Qu'est-ce qui se passe? L'aimant du rotor glisse tout le temps, glisse de la position actuelle du rotor vers le courant de l'axe y. Plus ce courant est important, plus le glissement est fort. L'observateur en temps réel calcule la position de cet aimant et «tord» les axes x , y tout le temps vers l'avant par rapport aux axes d , q (position du rotor). L'axe des x correspond toujours à la position actuelle de la liaison de flux dans le rotor - la position de «l'aimant». C'est-à-dire axe x , ytoujours tourner (en mode moteur) un peu plus vite que la rotation du rotor, compensant le glissement en lui. Les courants dans le rotor, s'ils sont mesurés ou modélisés, sont sinusoïdaux. Seulement, ils ne changent pas avec la fréquence des courants statoriques, mais avec la fréquence de ce glissement, c'est-à-dire très lentement. Si le stator de l'asynchrone industriel est de 50 Hz, alors lorsque vous travaillez sous charge, la fréquence actuelle dans le rotor est en unités de hertz. C'est en fait tout le secret de la commande vectorielle pour un moteur à induction.Comment le contrôle vectoriel d'un moteur à induction est-il meilleur que scalaire? Le contrôle scalaire est tel lorsqu'une tension d'une fréquence et d'une amplitude données est appliquée au moteur - par exemple, 380 V 50 Hz. Et cela ne dépend pas de la charge sur le rotor - pas de contrôleurs de courant et de vecteur ... La fréquence de tension et son amplitude sont juste définies - des quantités scalaires, et permettent aux courants et aux flux dans le moteur de trouver un endroit pratique pour eux comme ils le souhaitent. Dans le fonctionnement du moteur en régime permanent, la commande vectorielle ne peut pas être distinguée de la commande scalaire - la commande vectorielle appliquera également la même chose, disons 380 V, 50 Hz à la charge nominale. Mais dans des conditions transitoires ... si vous devez démarrer rapidement le moteur à un moment donné, si vous avez besoin d'élaborer un diagramme de mouvement, s'il y a une charge d'impulsion,si vous avez besoin de faire un mode générateur avec un certain niveau de puissance, toute cette commande scalaire ne peut pas le faire, ou le fait avec des transitoires lents et dégoûtants, qui peuvent également "assommer" le convertisseur de fréquence en dépassant le courant ou la tension du circuit intermédiaire (moteur oscille et peut passer en mode générateur auquel le convertisseur de fréquence n'est pas toujours adapté).Dans la structure vectorielle, "tout est sous contrôle". Au moment où vous vous fixez, le flux aussi. Vous pouvez les limiter au bon niveau afin de ne pas dépasser les paramètres de protection. Il est possible de forcer les courants de manière contrôlée, si pendant un court laps de temps il est nécessaire de faire un moment plusieurs fois plus grand. Il est possible de réguler non seulement le couple du moteur, mais aussi le débit (courant sur l'axe des x ): si la charge sur le moteur est faible, il est inutile de maintenir le plein débit dans le rotor (en faisant un aimant de «mode nominal») - vous pouvez l'affaiblir, réduire les pertes. Il est possible de stabiliser la vitesse avec un contrôleur de vitesse avec une précision et une vitesse élevées. Vous pouvez utiliser un entraînement asynchrone comme entraînement de traction (en transport), en définissant le moment de traction requis. En général, pour les applications complexes avec fonctionnement moteur dynamique, la commande vectorielle d'un moteur à induction est indispensable.Il existe également des caractéristiques distinctives de la commande vectorielle d'un moteur asynchrone par rapport à un moteur synchrone. Le premier est le capteur de position. Si, pour un entraînement synchrone, nous devons connaître la position absolue du rotor afin de comprendre où se trouve l'aimant, cela n'est pas requis dans un entraînement asynchrone. Le rotor n'a pas de structure polaire prononcée, l'aimant glisse constamment et si vous regardez les formules de l'observateur de liaison du flux du rotor, vous n'avez pas besoin de connaître la position: seule la vitesse du rotor est incluse dans les formules (en fait, il existe différentes formules, mais généralement ainsi). Par conséquent, vous pouvez économiser sur le capteur: un codeur incrémental conventionnel suffit pour suivre la vitesse (ou même un générateur tachymétrique), les capteurs de position absolue ne sont pas nécessaires. La deuxième caractéristique est le contrôle du débit dans un moteur à induction.Dans une machine synchrone à aimants permanents, le débit n'est pas régulé, ce qui limite la vitesse maximale du moteur: la tension sur l'onduleur cesse d'être suffisante. Dans un moteur à induction, lorsque cela se produit ... il suffit de diminuer la référence d'axex et continuez! La fréquence maximale est illimitée! Oui, le couple moteur diminuera à partir de cela, mais, surtout, vous pouvez «monter», contrairement à une machine synchrone (en vérité, c'est également possible là-bas, mais pas loin, pas pour tous les moteurs et avec beaucoup de problèmes).De même, il existe des algorithmes de contrôle vectoriel sans capteur pour un moteur à induction qui estiment l'angle de flux du rotor sans utiliser le signal du capteur de position (ou de vitesse) de l'arbre du rotor. De la même manière que pour les machines synchrones, il y a des problèmes dans le fonctionnement de tels systèmes à faible vitesse de rotor, où le moteur EMF est petit.Vous devriez également dire quelques mots sur le rotor. Si pour les moteurs asynchrones industriels, il est bon marché à l'aide d'une cage d'écureuil en aluminium, puis en traction, où les indicateurs de poids et de taille sont plus importants, au contraire, ils peuvent utiliser un cylindre en cuivre. Ainsi, dans tous vos véhicules électriques Tesla préférés, il y a précisément un moteur électrique asynchrone avec un rotor en cuivre (figure 7)Figure 7. Rotor de moteur électrique asynchrone Tesla Model S dans un revêtement en acier (photo provenant de diverses sources pour différentes années)C'est en fait tout ce que je voulais dire sur le moteur asynchrone. Dans cet article de revue, de nombreuses subtilités n'ont pas été prises en compte, telles que le régulateur de débit du rotor, la construction possible d'une structure vectorielle dans d'autres axes de coordonnées, les mathématiques de l'observateur de liaison de flux de rotor, et bien plus encore. Comme à la fin du dernier article, pour plus de détails, je renvoie le lecteur à des livres modernes sur le variateur, par exemple, «Anuchin A. S. Electric drive control systems. MEI, 2015 " .Sur quel microcontrôleur vous pouvez effectuer un contrôle vectoriel à part entière, lisez, par exemple, l'article «Nouveau microcontrôleur domestique de contrôle moteur K1921VK01T de OJSC« NIIET », et comment le déboguer dans l'article «Méthodes de débogage du logiciel du microcontrôleur dans un lecteur électrique» . Notre société LLC NPF Vector propose également le développement de systèmes de contrôle sur mesure pour les moteurs électriques et autres équipements électriques, des exemples de projets achevés peuvent être consultés sur notre site Web .PSJe m'excuse auprès des spécialistes pour le traitement pas tout à fait correct avec certains termes, en particulier avec les termes "flux", "liaison de flux", "champ magnétique" et d'autres - la simplicité nécessite un sacrifice ...Source: https://habr.com/ru/post/fr389793/
All Articles