Prologue
Dans un article précédent , la formulation du problème pour le développement d'une source d'alimentation de secours de faible puissance pour 60 W avec une sortie sinusoïdale pour la pompe de circulation du système de chauffage a été examinée. Le concept de mise en œuvre de ce dispositif a été retenu. Cet article discutera du développement du circuit électrique de l'appareil, avec les calculs nécessaires pour sélectionner les valeurs nominales des composants qui composent l'appareil.Armés de CAO et de manuels, de brouillons, d'un crayon et de GOOGLE, nous allons commencer à concevoir. Commençons par un simple: le système d'alimentation de l'appareil.Traiteur
Pour alimenter les éléments du circuit, nous avons besoin de trois types de bus DC à 12, 5 et 3,3 Volts.Bus de douze volts - le principal. C'est l'alimentation du pont qui injecte du courant dans l'enroulement basse tension d'un transformateur de réseau linéaire. De là, nous alimentons le conducteur des transistors inclus dans le pont. Les relais de commutation réseau seront également alimentés par ce bus.Un bus de cinq volts est nécessaire pour alimenter la puce de courant ACS712, la puce logique, l'écran LCD à caractères, etc.Le bus à trois volts alimentera le "cerveau" de l'appareil - MK STM32F100C8T6B.Digression lyriqueProteuse v 7.7. , . , Dip Trace. . .
Un tel schéma est né: l' image est cliquable. Les formateurs de bus 5 et 3,3 volts sont organisés sur des stabilisateurs LDO à 1% de type NCP1117STxx. L'alimentation analogique du module ADC provient du bus 3,3 Volts via des condensateurs d'inductance, de lissage et de blocage. Les terres analogiques devraient également être divisées. Mais ce n'est pas le cas dans ce schéma, car les mesures ne sont pas critiques, et une erreur de quelques chiffres n'entraînera pas de «bouleversement» de l'appareil. Nous appliquons un filtre logiciel - une moyenne mobile et peut même générer des erreurs dans une catégorie.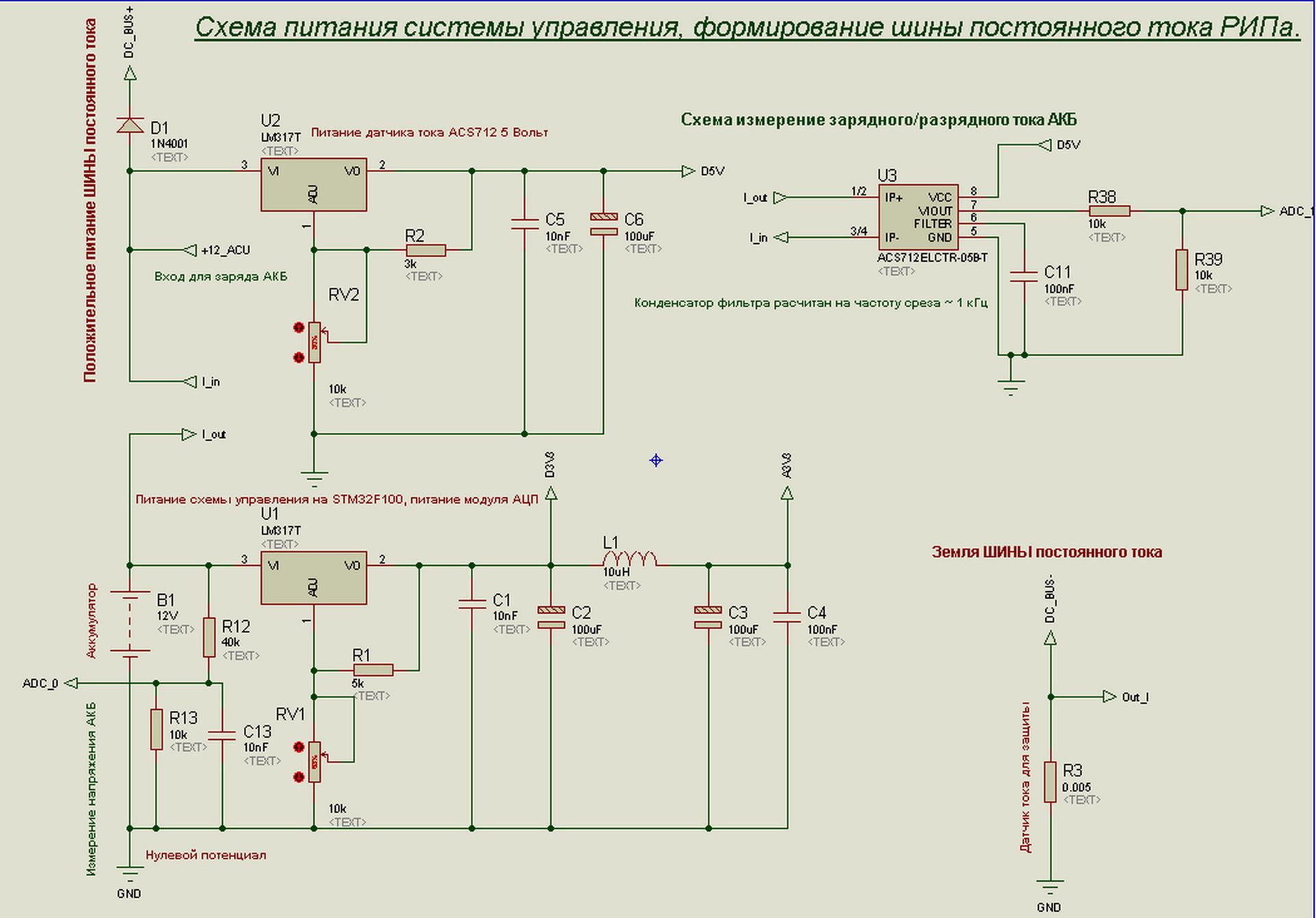
Mesure de courant et protection contre les surcharges
Le capteur de courant ACS712ELCTR-05B-T est un circuit intégré. La détection actuelle se produit sur l'effet Hall. Ce capteur permet au MK de mesurer à la fois le courant direct et le courant inverse. D'autres caractéristiques peuvent être trouvées dans son pdf . La sortie du capteur est analogique. Point médian correspondant à un courant nul = 2,5 V. Gain 185mV par 1 Amp. Bien que le capteur détecte des courants élevés, seule la linéarité est déformée et, à un certain courant, elle entre en saturation. Donc, pour coordonner la sortie du capteur avec MK, mettez un diviseur de tension. Et divisez l'échelle en deux. Les bits ADC MK sont suffisants pour une précision acceptable.Pour une protection à haute vitesse contre les surcharges ou les courts-circuits dans l'enroulement basse tension d'un transformateur linéaire, installez un shunt de courant. Le signal du shunt est forcé sur l'ampli-op et sur le comparateur nous assemblons un circuit de comparaison avec un verrou. Les données de surcharge seront introduites dans le MK, et également avec ce signal, nous fermerons TOUTES les clés de pont.Une courte vidéo, simulant le fonctionnement de la protection actuelle, est présentée ci-dessous.Partie puissance
La partie puissance du RIP est représentée sur la figure. L'image est cliquable.
Le pont de transistors "repose" sur le shunt de courant, pour fournir une protection à haute vitesse. La sortie du pont à travers un filtre LC, conçu pour une fréquence de coupure de ~ 1 kHz, est envoyée à l'enroulement basse tension du transformateur. Nous devrions parler du filtre et du transformateur plus en détail. Le filtre a été calculé dans le programme RL Calculator avec un lien vers le soi-disant off. Je ne trouve pas le site. Par conséquent, l'archive avec la calculatrice affichée ici . Voici l'écran de calcul.
 L'inductance résultante de 10 milligénères est assez impressionnante. Mais la capacité était décente. Étant donné que nous avons un changement à la sortie du filtre, vous ne pouvez pas le faire avec un condensateur polaire. Il a posé deux condensateurs céramiques en parallèle dans le circuit - 4,7 microfarads, X7R, 25V (1206).Le calcul de l'accélérateur en fonction des données obtenues a été effectué dans le programme Coil32. Voici un lien vers l'archive avec le programme. J'ai choisi une bague en ferrite pour un tel papillon avec les paramètres suivants: Ring N87 R25x15x10. Voici l'écran de calcul dans le programme.
L'inductance résultante de 10 milligénères est assez impressionnante. Mais la capacité était décente. Étant donné que nous avons un changement à la sortie du filtre, vous ne pouvez pas le faire avec un condensateur polaire. Il a posé deux condensateurs céramiques en parallèle dans le circuit - 4,7 microfarads, X7R, 25V (1206).Le calcul de l'accélérateur en fonction des données obtenues a été effectué dans le programme Coil32. Voici un lien vers l'archive avec le programme. J'ai choisi une bague en ferrite pour un tel papillon avec les paramètres suivants: Ring N87 R25x15x10. Voici l'écran de calcul dans le programme. Il s'est avéré 70 tours de fil d'un diamètre de 1 mm, pour assurer l'inductance requise. Il est tout à fait acceptable pour le remontage manuel.Le choix du transformateur s'est porté sur un transformateur toroïdal de type TTP-60, avec une tension secondaire de 9 volts. Le calcul est simple. Une tension alternative de 9 volts donne une amplitude de 12,7 volts. La tension d'une batterie chargée est d'environ 13 volts. On peut donc plus ou moins obtenir 220 volts en sortie. Pour charger la batterie, bien sûr, cela ne suffit pas. Par conséquent, il est suggéré d'obtenir l'enroulement secondaire des virages 5-6. Autrement dit, un enroulement basse tension avec un robinet s'est avéré. Aux bornes extrêmes de l'enroulement, nous supprimons la tension accrue pour charger la batterie pendant le fonctionnement du réseau. Et nous appliquons une tension du pont à la borne extrême et intermédiaire lorsque nous travaillons à partir de la batterie. Par la tension prise aux bornes extrêmes de l'enroulement, nous jugeons la tension dans l'enroulement haute tension pendant le fonctionnement de la batterie, rétroaction pour le réglage.Les transistors en pont sont contrôlés à partir du MK via les pilotes demi-pont IRS2101S. La gestion des touches supérieures s'effectue selon le schéma de bootstrap. Le transistor de charge à canal P est contrôlé par un bipolaire conventionnel. La self de charge de lissage a les mêmes dimensions et valeurs de conception que la self dans le filtre LC après le pont.
Il s'est avéré 70 tours de fil d'un diamètre de 1 mm, pour assurer l'inductance requise. Il est tout à fait acceptable pour le remontage manuel.Le choix du transformateur s'est porté sur un transformateur toroïdal de type TTP-60, avec une tension secondaire de 9 volts. Le calcul est simple. Une tension alternative de 9 volts donne une amplitude de 12,7 volts. La tension d'une batterie chargée est d'environ 13 volts. On peut donc plus ou moins obtenir 220 volts en sortie. Pour charger la batterie, bien sûr, cela ne suffit pas. Par conséquent, il est suggéré d'obtenir l'enroulement secondaire des virages 5-6. Autrement dit, un enroulement basse tension avec un robinet s'est avéré. Aux bornes extrêmes de l'enroulement, nous supprimons la tension accrue pour charger la batterie pendant le fonctionnement du réseau. Et nous appliquons une tension du pont à la borne extrême et intermédiaire lorsque nous travaillons à partir de la batterie. Par la tension prise aux bornes extrêmes de l'enroulement, nous jugeons la tension dans l'enroulement haute tension pendant le fonctionnement de la batterie, rétroaction pour le réglage.Les transistors en pont sont contrôlés à partir du MK via les pilotes demi-pont IRS2101S. La gestion des touches supérieures s'effectue selon le schéma de bootstrap. Le transistor de charge à canal P est contrôlé par un bipolaire conventionnel. La self de charge de lissage a les mêmes dimensions et valeurs de conception que la self dans le filtre LC après le pont.Détection et commutation de réseau
Pour la détection de réseau, un circuit de puissance de condensateur est utilisé. La tension est connectée à l'optocoupleur. La sortie de l'optocoupleur est entraînée dans le MK pour contrôler la disponibilité du réseau. Le diagramme est illustré ci-dessous. L'image est cliquable.
La tension secteur à travers un condensateur d'extinction, des diodes, une diode zener, des condensateurs de lissage, une résistance de limitation de courant est envoyée à la LED optocoupleur. La sortie va à MK. Les relais qui commutent le réseau à la charge sont contrôlés par le MK. La protection actuelle est implémentée sur l'ampli op et le comparateur. La sortie du comparateur diverge dans deux transistors. Un pour entrer le signal dans le MK, le second pour fermer tous les transistors en pont. La figure ci-dessous montre les circuits d'activation du pilote pour le pont. L'image est cliquable.
Tout standard, selon
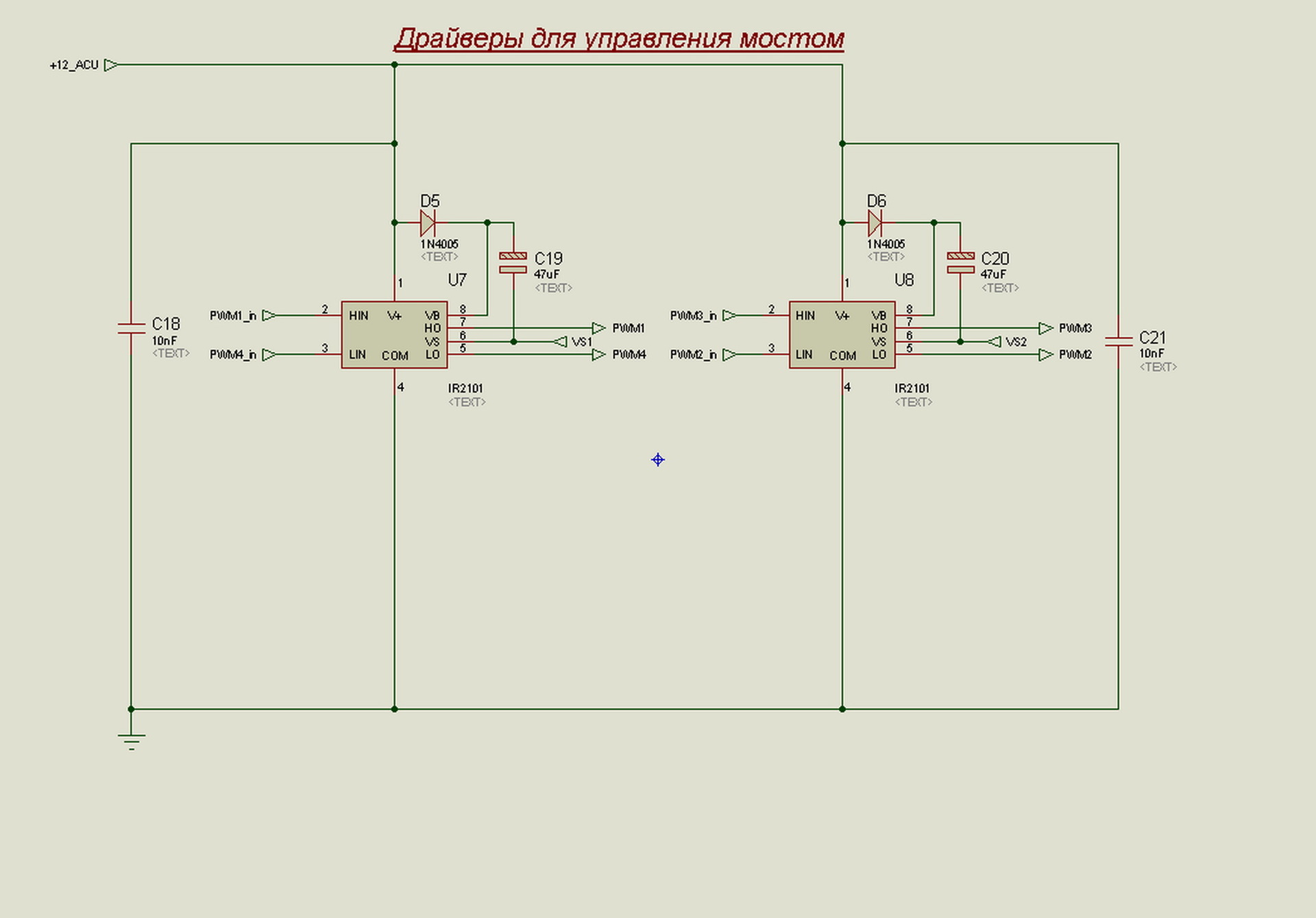 produit pour le pilote IRS2101S.
produit pour le pilote IRS2101S.Circuit de mise en forme d'impulsion de pont
Afin de ne pas surcharger le MK de travaux inutiles, la formation de signaux d'impulsion de pont est collectée sur la logique I. Trois signaux sont requis du MK. Un PWM sinusoïdal par période, ainsi que deux signaux discrets, la première demi-onde et le second. La mise en œuvre de cette approche est illustrée sur la figure. L'image est cliquable. Surintensité, établie en MK et dupliquée par LED. La commande du transistor de charge du canal P est organisée sur un transistor bipolaire NPN. La logique du pont sera la suivante. Le PWM 20 kHz sera modulé par une table sinusoïdale de 400 valeurs. Le transfert de valeurs vers le registre PWM sera organisé via DMA. Après avoir chargé la moitié du tampon, soit 200 valeurs, un demi-cycle, le DMA provoquera une interruption, où les signaux MCU_P_1 et MCU_P_2 s'inverseront mutuellement. Après avoir chargé la totalité du tampon, dans l'interruption du DMA, les signaux MCU_P_1 et MCU_P_2 seront inversés. Et plus loin en mode cyclique. Un niveau de demi-onde constant sera appliqué au transistor du bras supérieur, et un PWM sinusoïdal à la clé inférieure du bras opposé. Le demi-cycle suivant est une autre paire de transistors.Pendant la surintensité, le transistor NPN Q7 fournira un niveau bas à l'entrée logique, ce qui entraînera à son tour un niveau bas à la sortie logique et, par conséquent, verrouillera TOUS les transistors en pont.
La logique du pont sera la suivante. Le PWM 20 kHz sera modulé par une table sinusoïdale de 400 valeurs. Le transfert de valeurs vers le registre PWM sera organisé via DMA. Après avoir chargé la moitié du tampon, soit 200 valeurs, un demi-cycle, le DMA provoquera une interruption, où les signaux MCU_P_1 et MCU_P_2 s'inverseront mutuellement. Après avoir chargé la totalité du tampon, dans l'interruption du DMA, les signaux MCU_P_1 et MCU_P_2 seront inversés. Et plus loin en mode cyclique. Un niveau de demi-onde constant sera appliqué au transistor du bras supérieur, et un PWM sinusoïdal à la clé inférieure du bras opposé. Le demi-cycle suivant est une autre paire de transistors.Pendant la surintensité, le transistor NPN Q7 fournira un niveau bas à l'entrée logique, ce qui entraînera à son tour un niveau bas à la sortie logique et, par conséquent, verrouillera TOUS les transistors en pont.Plateforme matérielle
Le bus à trois volts alimentera les "cerveaux" de l'appareil - MK STM32F100C8T6B.
Comme déjà mentionné ci-dessus, MK sera de la famille ST STM32. Qu'est-ce qui détermine un tel choix?- MK a un faible coût. Les analogiques de capacité d'ATMEL ou PIC ont des prix encore plus élevés, avec une capacité en bits de 8 bits.
- La présence à bord d'un ADC 12 bits, DAC, contrôleur DMA.
- Capacité de base de 32 bits.
- Augmentation de la capacité de mémoire des programmes et des données.
En un mot, il gagne dans de nombreux postes.Pour indiquer le fonctionnement de l'appareil et émettre les données nécessaires, un écran LCD de synthèse de signe avec un contrôleur de contrôle KS0066 (HD44780) sera utilisé dans le circuit. Il existe de nombreuses bibliothèques pour travailler avec un tel affichage dans RuNet.Le schéma de connexion de l'affichage au contrôleur est le suivant. L'image est cliquable.
La connexion est directe. Les ports MK sont directement connectés à l'écran. La conjugaison de la logique 3 volts et 5 volts n'a pas été effectuée. Des problèmes peuvent survenir ici, et les conclusions MK devront être configurées en tant que sorties avec un collecteur ouvert, et les lignes doivent être tirées jusqu'à 5 volts, et les sorties MK elles-mêmes doivent être utilisées tolérantes à 5 volts. Comme on dit, la vie montrera, mais lors de la conception d'une carte de circuit imprimé, il est nécessaire de poser cette «mise à jour».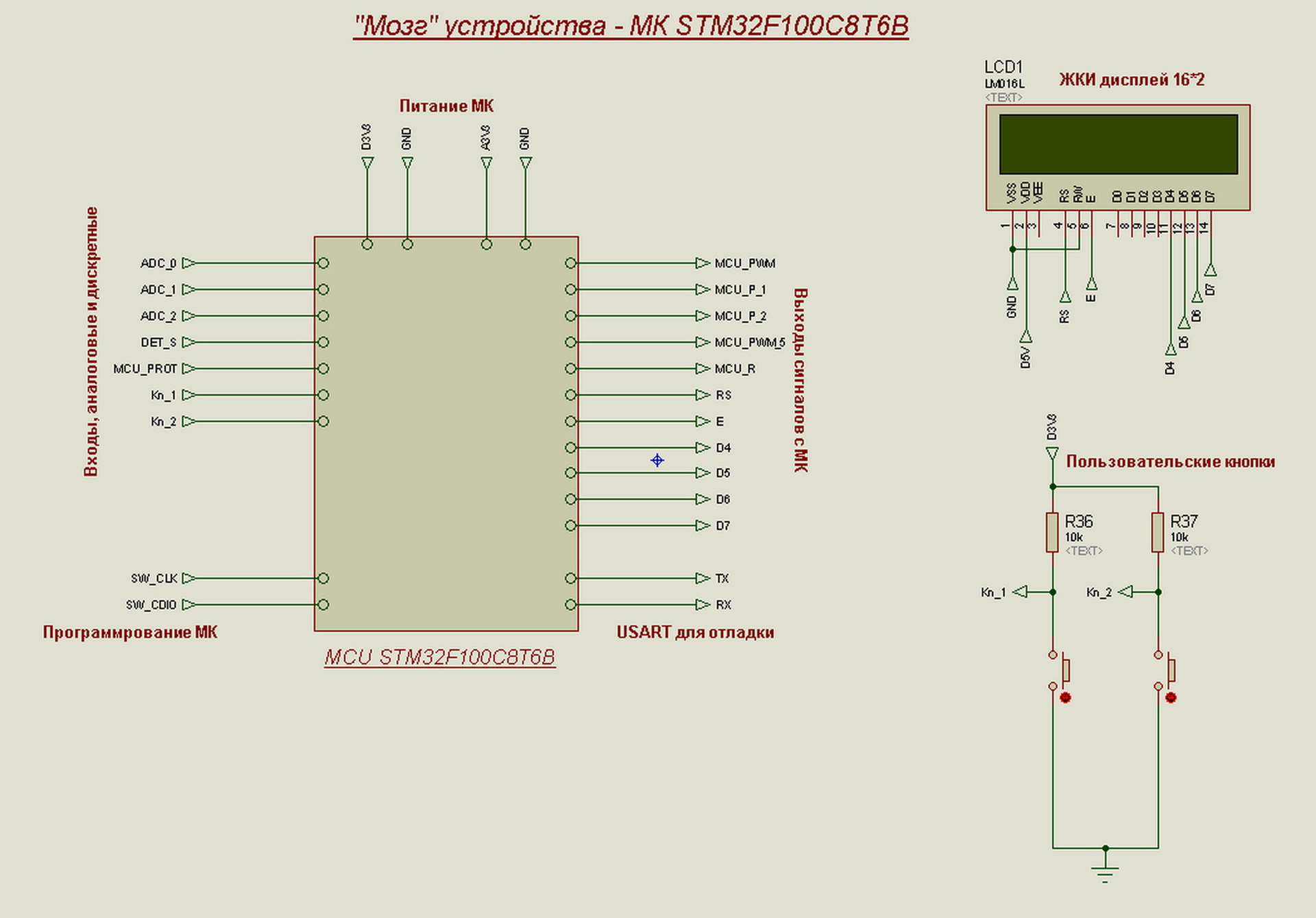 Des boutons personnalisés sont nécessaires pour organiser la navigation dans les menus et les paramètres affichés à l'écran.
Des boutons personnalisés sont nécessaires pour organiser la navigation dans les menus et les paramètres affichés à l'écran.Calculs supplémentaires
Pour calculer le condensateur bootstrap, nous utilisons la méthode proposée dans cet article . A la fin de la description, il y a un exemple de calcul de la capacité nécessaire d'un condensateur bootstrap. Nous le prenons comme base et racontons nos réalités.Nous décidons des paramètres du circuit:- V IN, MAX = tension d'entrée maximale de 15 V ,
- V DRV = tension d'alimentation du pilote 12V et amplitude du signal de commande,
- dV BST = tension d'ondulation de 0,5 V aux bornes du condensateur C BST en régime permanent,
- dVBST,MAX = 3V CBST ,
- fDRV = 100 Hz , 10 ,
- DMAX = 1 .
:- QG = 24 nC IRLZ44ZS VDRV = 5V VDS = 44V,
- RGS = 10 RGS,
- IR = 10uA DBST TJ = 80°C,
- VF = 0.6V DBST 0.1A TJ = 80°C,
- ILK = 0.13mA TJ = 100°C,
- IQBS = 1mA , .
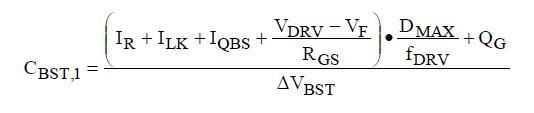
 Nous sélectionnons la valeur calculée dans la série standard. Prenez le type de condensateur au tantale, pour réduire le courant de fuite du condensateur lui-même.On obtient au total 47 μF x 25 V, type D. On calcule le courant de charge du condensateur en choisissant ainsi une diode.
Nous sélectionnons la valeur calculée dans la série standard. Prenez le type de condensateur au tantale, pour réduire le courant de fuite du condensateur lui-même.On obtient au total 47 μF x 25 V, type D. On calcule le courant de charge du condensateur en choisissant ainsi une diode. Ainsi, une diode conçue pour un courant continu de 1 A fera face à cette tâche.
Ainsi, une diode conçue pour un courant continu de 1 A fera face à cette tâche.Conclusion
Cet article a développé le circuit électrique du RIP. Maintenant, nous allons rassembler toutes les pièces du circuit. Et sur la base du schéma déjà approuvé, nous développerons la topologie de la carte de circuit imprimé. Je présenterai la disposition du PCB et le circuit électrique généralisé avec les spécifications des composants dans le prochain article.J'écrirai l'implémentation logicielle des fonctionnalités de l'appareil dans un article séparé. Il y a une idée de mettre en œuvre dans le programme de nombreuses solutions intéressantes, par exemple, la régulation PID de la tension de sortie lorsque l'on travaille à partir de la batterie.Épilogue
Avec cet article, je voulais faire valoir auprès du public et des amateurs de jambons et non-amateurs aussi, des solutions schématiques. Un lecteur attentif trouvera peut-être des erreurs critiques dans les circuits ou suggérera une exécution plus correcte des nœuds individuels. Il existe une solution plus simple pour les nœuds ou pour augmenter la fiabilité afin d'introduire des solutions de circuits supplémentaires.PSLiens vers toutes les parties du cycle:- Développement d'une alimentation de secours basse consommation à sortie sinusoïdale. Partie 1. Énoncé du problème.
- Développement d'une alimentation de secours basse consommation à sortie sinusoïdale. Partie 2. Développement d'un schéma électrique.
- Développement d'une alimentation de secours basse consommation à sortie sinusoïdale. Partie 3. Travail sur les bugs