Réflexions à voix haute. Quatre vaut mieux qu'un ... Ou le concept d'un quadricoptère de transport
L'article met en évidence les lacunes fondamentales d'un tel aéronef comme un hélicoptère, et leur solution est proposée. L'application possible de ce concept dans les systèmes et complexes robotiques est considérée. L'approche décrite ne prétend pas être sans ambiguïté et précise, et l'article vise à partager une idée technique avec les lecteurs GT.EXPOSÉ DU PROBLÈME
L'avion (LA) est une machine ou un appareil permettant de voler dans l'atmosphère ou l'espace extra-atmosphérique. À l'heure actuelle, la classification des aéronefs comprend une grande variété de types et de types d'aéronefs, parmi cet ensemble, on peut distinguer l'un des types d'aéronefs les plus utilisés - un hélicoptère.Voyons les principales lacunes de l'hélicoptère en tant que classe:- la difficulté de charger des marchandises et des équipements de grandes dimensions en raison de l'étroit compartiment de chargement,
- l'atterrissage n'est possible qu'en l'absence de roulis latéral en raison du fuselage étroit et d'une zone balayée par le rotor.
Pour illustrer 3 et 4 lacunes, nous considérons un hélicoptère de transport Mi-26 (Fig.1). Figure 1 - Hélicoptère Mi-26 en trois projectionsLa largeur du compartiment à bagages de l'hélicoptère est de 320 cm, à titre de comparaison, la largeur du véhicule blindé de transport de troupes BTR-70 est de 280 cm, respectivement, il y a un espace de 20 cm entre chaque côté du convoyeur et la paroi du compartiment à bagages de l'hélicoptère, ce qui est un facteur négatif lors du chargement d'équipements de telles dimensions (Fig. 2, à droite). La figure 2 (à gauche) illustre la complexité du processus de chargement à l'aide d'un chariot élévateur.La présence de ce facteur présente des inconvénients lors de l'utilisation d'hélicoptères dans le transport de fret civil et est critique lors de l'utilisation de ces avions dans des situations d'urgence et des opérations militaires.
Figure 1 - Hélicoptère Mi-26 en trois projectionsLa largeur du compartiment à bagages de l'hélicoptère est de 320 cm, à titre de comparaison, la largeur du véhicule blindé de transport de troupes BTR-70 est de 280 cm, respectivement, il y a un espace de 20 cm entre chaque côté du convoyeur et la paroi du compartiment à bagages de l'hélicoptère, ce qui est un facteur négatif lors du chargement d'équipements de telles dimensions (Fig. 2, à droite). La figure 2 (à gauche) illustre la complexité du processus de chargement à l'aide d'un chariot élévateur.La présence de ce facteur présente des inconvénients lors de l'utilisation d'hélicoptères dans le transport de fret civil et est critique lors de l'utilisation de ces avions dans des situations d'urgence et des opérations militaires.
 Figure 2 - Processus de chargement avec un chariot élévateur (à gauche), chargement du BTR-70 (à droite)
Figure 2 - Processus de chargement avec un chariot élévateur (à gauche), chargement du BTR-70 (à droite)RÉSOUDRE LE PROBLÈME
Un quadcopter est un avion à quatre rotors qui tournent en diagonale dans des directions opposées. Cette disposition des rotors vous permet de réaliser un avion avec un fuselage plus large que dans les hélicoptères (Fig.3), et la présence de quatre rotors fournira quatre zones balayées, ce qui permettra l'atterrissage et le décollage avec roulis latéral.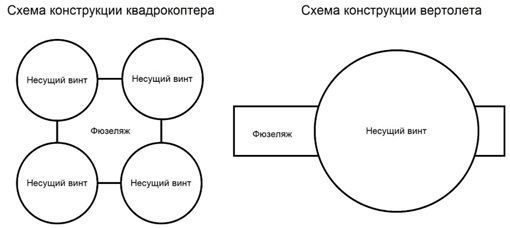 Figure 3 - Schéma fonctionnel des conceptions du quadricoptère et de l'hélicoptèreLors de l'utilisation de ce schéma, des composants tels que le système de carburant, le système de commande, le système radar, les composants électriques sont situés dans la partie supérieure du fuselage dans une capsule blindée spéciale (Fig.4). Cette disposition des nœuds vous permet de placer les trappes et les rampes de chargement du compartiment à bagages dans l'un des 5 côtés du fuselage (Fig.5): des quatre côtés et du bas (trappe de chargement vertical).
Figure 3 - Schéma fonctionnel des conceptions du quadricoptère et de l'hélicoptèreLors de l'utilisation de ce schéma, des composants tels que le système de carburant, le système de commande, le système radar, les composants électriques sont situés dans la partie supérieure du fuselage dans une capsule blindée spéciale (Fig.4). Cette disposition des nœuds vous permet de placer les trappes et les rampes de chargement du compartiment à bagages dans l'un des 5 côtés du fuselage (Fig.5): des quatre côtés et du bas (trappe de chargement vertical).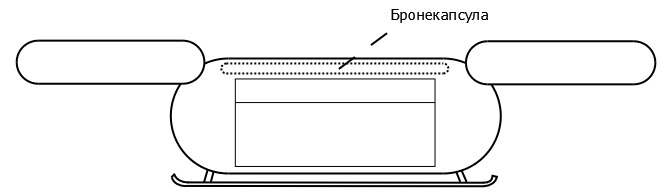 Figure 4 - Emplacement de la capsule blindée
Figure 4 - Emplacement de la capsule blindée Figure 5 - Emplacement des écoutilles de chargement
Figure 5 - Emplacement des écoutilles de chargementINCONVÉNIENTS DE LA DÉCISION
L'approche considérée présente les inconvénients suivants:- vulnérabilité du moteur à rotor,
- petit volume du réservoir de carburant en raison du placement en haut du fuselage.
Solutions possibles:- placement des rotors dans des nacelles spéciales et des plaques blindées couvrant les moteurs (Fig.7)
- placement des réservoirs de carburant à l'extérieur du fuselage de l'avion.
 Figure 7 - Emplacement des rotors
Figure 7 - Emplacement des rotorsAPPLICATION DU CONCEPT AUX
SYSTÈMES ET COMPLEXES ROBOTIQUES
Véhicule aérien sans pilote (UAV) - un avion sans équipage à bord, mis en œuvre à l'aide de la robotique. La mise en place du quadricoptère cargo, en tant que drone, est conseillée:- dans des complexes robotiques, par exemple, dans le cadre d'un système robotique de transport et de logistique (processus entièrement automatique de stockage et de transport de marchandises);
- en tant que système indépendant, à utiliser dans des conditions de danger accru pour la vie du pilote (urgence, opérations militaires);
- en tant que système indépendant pour résoudre des tâches nécessitant un grand nombre d'avions et un haut degré d'efficacité (opérations militaires, transport de marchandises, soins médicaux d'urgence).
Sur la base de l'application ci-dessus d'un drone cargo, nous considérons les implémentations possibles de systèmes de contrôle d'aéronefs en utilisant des approches classiques.Gestion centralisée avec un opérateur humain (communication biunivoque) Structure du système de gestion:- opérateur humain
- terminal distant
- Avion avec un système de traitement de l'information intelligent embarqué.
L'ensemble du processus de contrôle de l'avion est mis en œuvre par l'exploitant via le terminal, le système de traitement de l'information à bord analyse les informations des capteurs et avertit l'exploitant lorsque les paramètres s'écartent de la norme, prédit d'éventuelles situations d'urgence, c'est-à-dire Il s'agit d'un système expert dynamique.Gestion centralisée avec une salle de contrôle (communication un-à-plusieurs). Structure du système de gestion:- opérateur humain
- terminal distant
- un ou un groupe d'aéronefs avec un système de contrôle intelligent embarqué.
L'opérateur humain à travers le terminal met en œuvre la planification de l'itinéraire, définit les destinations, contrôle l'exactitude des tâches, l'état de l'avion, c'est-à-dire remplit les fonctions d'un répartiteur. Le système de contrôle embarqué contrôle l'avion en mode automatique. Avec cette approche, de nombreux avions peuvent être contrôlés par l'opérateur.Gestion décentralisée (relation plusieurs-à-plusieurs). Structure du système de gestion:- demander des sources (personne, système technique),
- Groupe LA avec système de contrôle intelligent embarqué.
Les sources de la demande génèrent des demandes de service. Le groupe d'aéronefs traite les données d'application et effectue le service en fonction des priorités des applications et de l'emplacement relatif de l'aéronef et des sources de demande. Dans cette approche, les principes du contrôle de groupe des robots sont utilisés: interrogation (avec la définition du nœud principal ou de la station de base), un réseau en anneau avec accès par jeton, ou un cas particulier d'un réseau en anneau - un réseau de bus. Source: https://habr.com/ru/post/fr391105/
All Articles