Dans cet article, je parlerai de la façon dont j'ai fabriqué un télémètre à balayage laser fait maison en utilisant le principe de triangulation de la mesure de distance, et de l'expérience de son utilisation sur un robot.
Pourquoi ai-je besoin d'un télémètre à balayage?
. — . — - . , , . — , , .
, . , — , .
— 1000$.
, . - Neato:

, . ebay 100$. RPLIDAR, , . — 400$.
Neato, . , , .
:

, , . , .
, , . - (h) , — , .
:
, — , .
, , .
— , ? , ( ), . , , . .
. , . , .
, Neato, RPLIDAR .
— . . , , - .
, HDD — , , , . , — . 3 , , . — , , , , — . , .
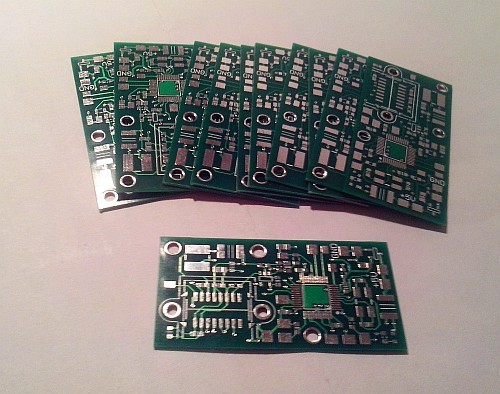
:
— 3.
.
, - . , . , , , . CCD , , . , — .
TSL1401 iC-LF1401. , , 128 . 3 , .
ELIS-1024:
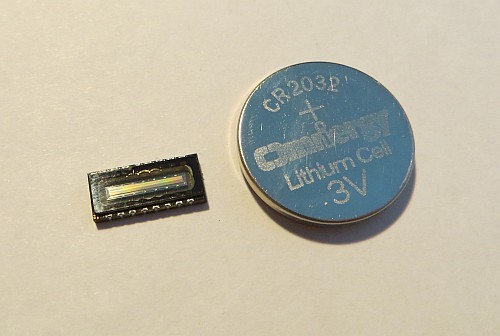
. .
, Taobao, . Aliexpress ( 18$), . — , , 2007 . . , ELIS-1024 .
ELIS-1024, , 1024 . , .
DLIS-2K. , 2048 . , Neato, , RPLIDAR. , , — 50$.
, . — STM32F303, , , , .
:

( 10) , .
— AD8061. , 100.
, , - 1.5, . , , .
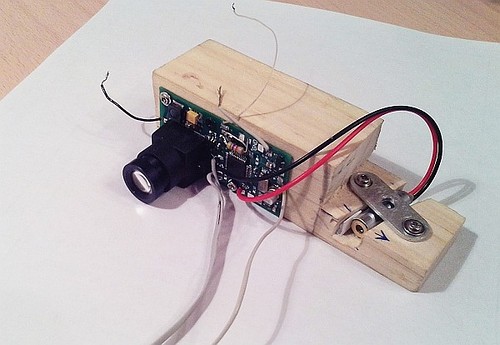
, , ( 10 ):
M12, 16. ( ).
— (780 ) , 3.5 .
, , , , .
, :
, .
, , .
( 3 ).

, . , , , .
, , .
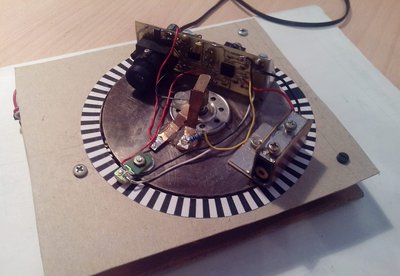
HDD, , . , .
, , , 3D , , , . 3D , - .
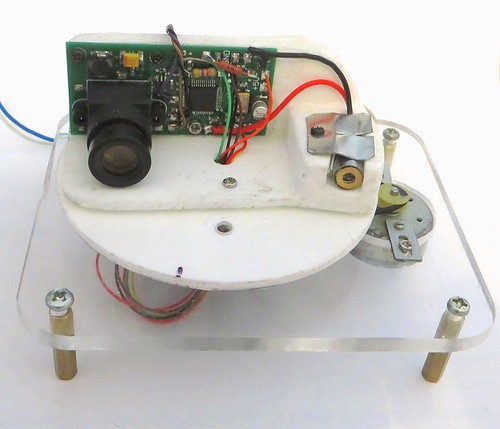
:

. , , . , , .
, 6 — . , , . GND UART TX 2 . 2 .
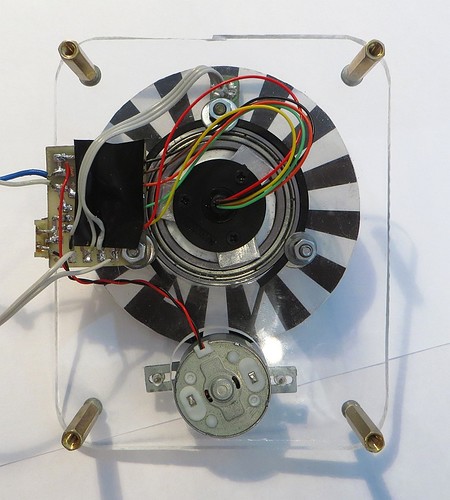
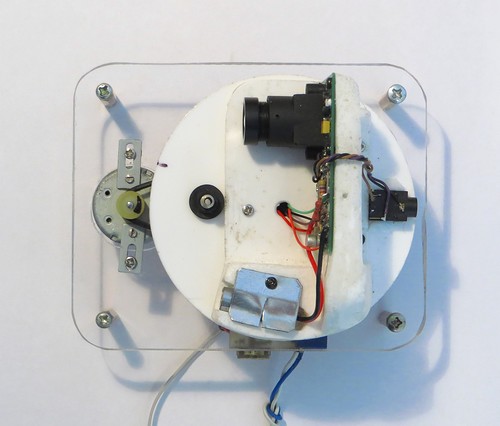
:

. . , , .
. 6806ZZ. , — , - . .
5 . , , . .
:
, . .
, . , , .
, . , .
, . , :
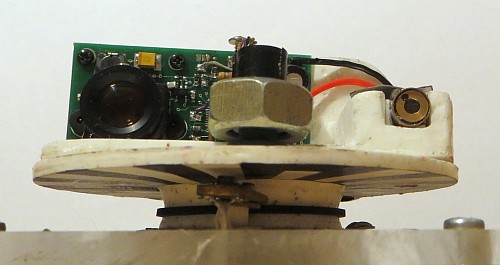
. .
, , , ( ).
:
:
.
— .
— , . , . , . , .
, .
, :
, , , .. , , , . , , .
, .
— - . ( ) , , , . , — 780 .
:
:
: 88x110 .
: 65 ( 55 ).
: 80 ( mini-CD ).
, .
0.7 :
:
| DIY, $ | ., $ |
|---|
| | |
| 1,00 | 0,50 |
| 0,00 | 1,00 |
| 1,50 | 1,00 |
| 7,50 | 5,00 |
| 0,00 | 2,00 |
| | |
| STM32F303CBT6 | 5,00 | 4,00 |
| 18,00 | 12,00 |
| 4,00 | 3,00 |
| 1,50 | 0,50 |
| 2,00 | 1,50 |
| 1,00 | 0,50 |
| 1,00 | 0,80 |
| 3,00 | 2,00 |
| 0,00 | 1,00 |
| 0,00 | 20,00 |
| : | 45,50 | 54,80 |
— , — ( ).
, .
3 , — 6 ( ). 360 , 2160 , 460 . — ( ) . , , , . 8 1024 128 , 6 — 170 .
STM32F303 72 — 6 MSPS ( 10 ). 8 , , (Dual ADC mode — Interleaved mode). ADC1, , , ADC2:
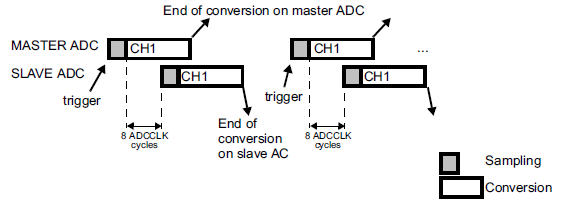
, , ( TIM1).
TIM1 , .
, , TIM_OCMode_Toggle, .
:
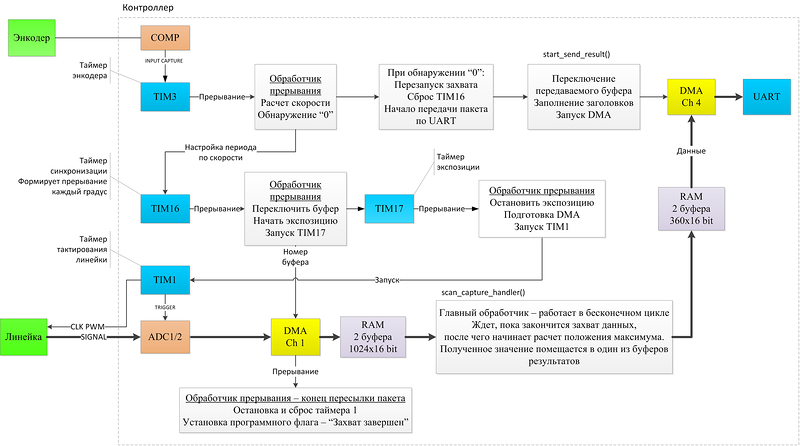
. , , TIM1, ADC1/2 DMA. , , TIM17, Single Pulse.
TIM3 , . . TIM16 , 1 . .
, DMA 1024 , ADC, , : , , — (0.1 ). . , , UART DMA.
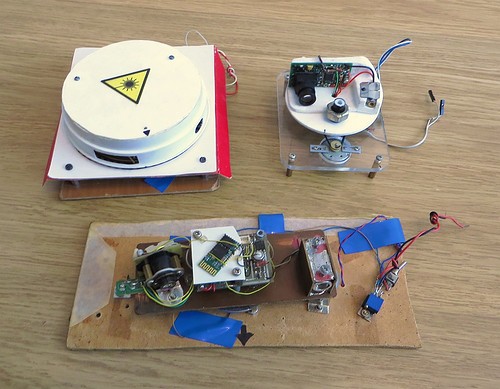
, , . , :
, — Roomba 400 :
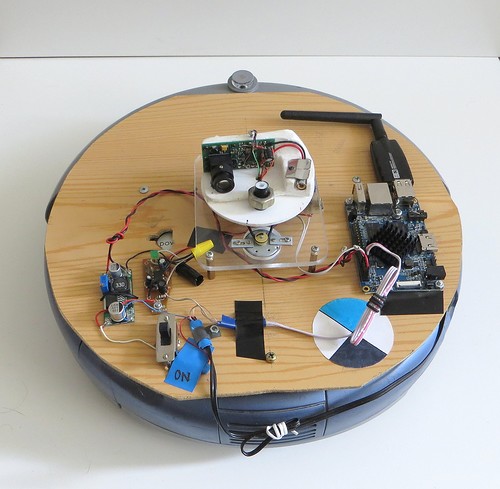
Orange Pi PC, .
, - , 6 / 6. Orange Pi DC-DC .
ROS.
ROS- ( Neato), UART , ( ) ROS.
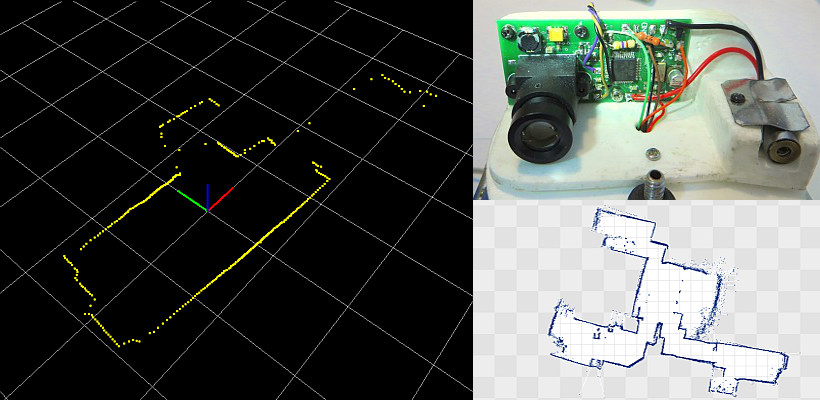
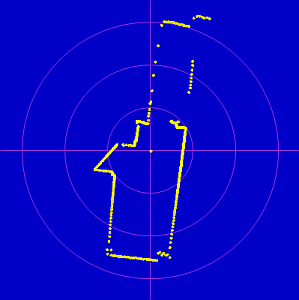
rviz ( ROS), :

— 1 .
, ROS, , . , , hector_slam. : SLAM — .
( , "" , , ):
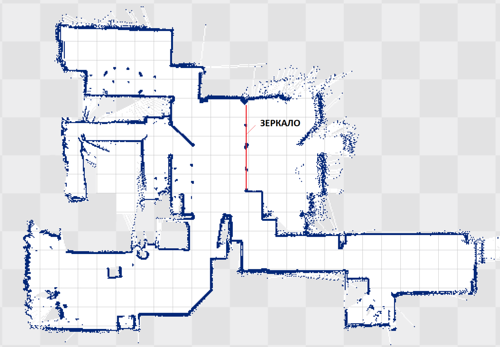
ROS ("" ROS), , . , Orange Pi ROS- Roomba , . , hector_slam Orange Pi, , .
SLAM . , , "" . ROS , , , .
:
hector_slam:
P. S. .