Disney Research Robotics développe un lecteur hybride de nouvelle génération
 Un groupe d'ingénieurs robotiques de Disney Research et des spécialistes enthousiastes invités ont créé un robot avec une nouvelle génération d'entraînements hydrostatiques qui peuvent simuler de manière étonnamment précise et fluide les mouvements humains. Des entraînements innovants combinant des éléments pneumatiques et hydrauliques dans la conception sont capables de fournir aux mouvements du robot une précision considérablement plus grande des mouvements, la capacité de capturer et de maintenir délicatement des objets fragiles.Il existe deux principaux types de systèmes moteurs qui soutiennent l'activité motrice du robot: pneumatique et hydraulique. Chacun d'eux a ses propres avantages uniques, mais fait également face à un certain nombre de limitations techniques qui déterminent en fin de compte le niveau de rétroaction et de contrôle des mouvements effectués par le robot.Ainsi, les systèmes hydrauliques donnent à n'importe quelle machine Hercules une force, offrent une précision suffisamment élevée des mouvements et offrent des possibilités de mise en œuvre et de configuration flexible des rétroactions. Dans le même temps, ces systèmes sont non compacts et lourds, dépendent à 100% de sources d'alimentation externes. Un système pneumatique simple et fiable ne nécessite pas de source d'alimentation externe, mais impose des restrictions assez sérieuses sur la disposition des chemins de câbles et des moteurs, démontre une mauvaise qualité de rétroaction et offre un minimum d'options de contrôle. Les systèmes électriques, selon le niveau des capacités révélées, occupent une position intermédiaire.Un groupe de chercheurs de Disney Research, qui a créé un lecteur hybride, connaît déjà bien la communauté professionnelle pour la création de robots utilisant les technologies les plus avancées, notamment Microsoft Kinect, Xtion Pro Live d'ASUS et d'autres. Les ingénieurs de la société ont présenté leur robot, qui lance habilement des balles avec des humains, en 2012. année.Un autre exemple est le robot d'ingénieurs japonais, capable de jongler avec précision et rapidement d'une main, démontré par les développeurs lors de la Conférence internationale IEEE 2012 sur la robotique et l'automatisation (2012 Conférence internationale IEEE sur la robotique et l'automatisation, ICRA).Aujourd'hui, une équipe d'ingénieurs de Disney Research dirigée par John P. Whitney de la Northeastern University a développé un entraînement hydraulique-pneumatique unique qui combine les avantages des systèmes pneumatiques et hydrauliques qui sont toujours utilisés séparément. Dans le nouvel entraînement, au lieu des articulations complètement contrôlées par une paire de soupapes hydrauliques, le mouvement dans une direction donnée est effectué par l'hydraulique, et le retour à sa position d'origine est effectué par la pneumatique. Cette solution nous a permis de simplifier considérablement la conception de l'entraînement et d'utiliser les capacités de la pneumatique, agissant comme un amortisseur supplémentaire, pour fournir des mouvements avec une douceur et un naturel accrus.
Un groupe d'ingénieurs robotiques de Disney Research et des spécialistes enthousiastes invités ont créé un robot avec une nouvelle génération d'entraînements hydrostatiques qui peuvent simuler de manière étonnamment précise et fluide les mouvements humains. Des entraînements innovants combinant des éléments pneumatiques et hydrauliques dans la conception sont capables de fournir aux mouvements du robot une précision considérablement plus grande des mouvements, la capacité de capturer et de maintenir délicatement des objets fragiles.Il existe deux principaux types de systèmes moteurs qui soutiennent l'activité motrice du robot: pneumatique et hydraulique. Chacun d'eux a ses propres avantages uniques, mais fait également face à un certain nombre de limitations techniques qui déterminent en fin de compte le niveau de rétroaction et de contrôle des mouvements effectués par le robot.Ainsi, les systèmes hydrauliques donnent à n'importe quelle machine Hercules une force, offrent une précision suffisamment élevée des mouvements et offrent des possibilités de mise en œuvre et de configuration flexible des rétroactions. Dans le même temps, ces systèmes sont non compacts et lourds, dépendent à 100% de sources d'alimentation externes. Un système pneumatique simple et fiable ne nécessite pas de source d'alimentation externe, mais impose des restrictions assez sérieuses sur la disposition des chemins de câbles et des moteurs, démontre une mauvaise qualité de rétroaction et offre un minimum d'options de contrôle. Les systèmes électriques, selon le niveau des capacités révélées, occupent une position intermédiaire.Un groupe de chercheurs de Disney Research, qui a créé un lecteur hybride, connaît déjà bien la communauté professionnelle pour la création de robots utilisant les technologies les plus avancées, notamment Microsoft Kinect, Xtion Pro Live d'ASUS et d'autres. Les ingénieurs de la société ont présenté leur robot, qui lance habilement des balles avec des humains, en 2012. année.Un autre exemple est le robot d'ingénieurs japonais, capable de jongler avec précision et rapidement d'une main, démontré par les développeurs lors de la Conférence internationale IEEE 2012 sur la robotique et l'automatisation (2012 Conférence internationale IEEE sur la robotique et l'automatisation, ICRA).Aujourd'hui, une équipe d'ingénieurs de Disney Research dirigée par John P. Whitney de la Northeastern University a développé un entraînement hydraulique-pneumatique unique qui combine les avantages des systèmes pneumatiques et hydrauliques qui sont toujours utilisés séparément. Dans le nouvel entraînement, au lieu des articulations complètement contrôlées par une paire de soupapes hydrauliques, le mouvement dans une direction donnée est effectué par l'hydraulique, et le retour à sa position d'origine est effectué par la pneumatique. Cette solution nous a permis de simplifier considérablement la conception de l'entraînement et d'utiliser les capacités de la pneumatique, agissant comme un amortisseur supplémentaire, pour fournir des mouvements avec une douceur et un naturel accrus.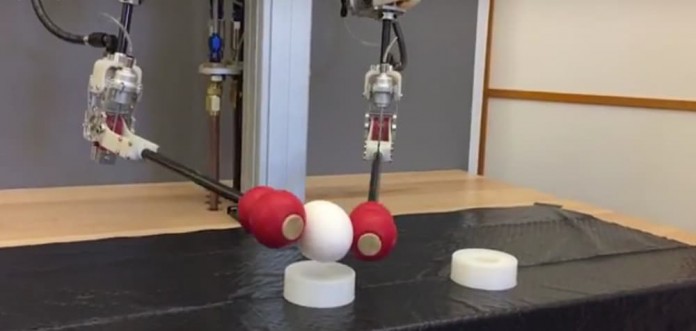 L'entraînement hybride proposé par les ingénieurs utilisait un seul moteur, le système hydraulique est grandement facilité. En conséquence, l'ensemble de la conception s'est avéré être rapide, facile et précis. Un autre avantage du système hybride proposé par rapport aux systèmes robotiques fonctionnant sur une hydraulique propre est l'absence d'une dépendance stricte à l'alimentation électrique. L'apport résiduel d'air comprimé dans la partie pneumatique du système peut effectuer une quantité limitée de travail utile. Ainsi, un robot chirurgien avec des entraînements similaires en cas de défaillance du complexe de laboratoire d'alimentation pourra ramener le bras avec l'instrument dans sa position d'origine, libérant ainsi le chirurgien humain l'accès au corps du patient.Pour les essais au banc, les ingénieurs ont préparé le prototype de système hybride le plus simple sans membres inférieurs. La partie supérieure du robot humanoïde a deux manipulateurs avec quatre degrés de liberté pour chacun. Des caméras stéréoscopiques miniatures sont installées sur la tête du robot, offrant au robot la possibilité d'un contact visuel avec l'environnement et, dans le cas du passage à la télécommande, la possibilité de transmettre une image de la réalité à un opérateur humain.La commande à distance du robot est rendue possible grâce à des contrôleurs portables spéciaux fournissant un retour d'informations. Portant un casque de réalité virtuelle, l'opérateur «efface ainsi la ligne» entre lui et le robot. Dans ce cas, ce dernier répète avec précision les mouvements de la personne, et la personne voit tout ce qui se passe devant l'œil de la caméra du robot. La précision de la répétition des mouvements et la résolution de la rétroaction sont telles qu'une personne utilisant les mains d'un robot pourra enfiler une aiguille dans l'œil et effectuer des manipulations ultra-précises similaires. En même temps, la vitesse de déplacement, la vitesse de réaction et le niveau de coordination seront suffisants pour effectuer des manipulations rapides - attraper la balle lancée, etc.
L'entraînement hybride proposé par les ingénieurs utilisait un seul moteur, le système hydraulique est grandement facilité. En conséquence, l'ensemble de la conception s'est avéré être rapide, facile et précis. Un autre avantage du système hybride proposé par rapport aux systèmes robotiques fonctionnant sur une hydraulique propre est l'absence d'une dépendance stricte à l'alimentation électrique. L'apport résiduel d'air comprimé dans la partie pneumatique du système peut effectuer une quantité limitée de travail utile. Ainsi, un robot chirurgien avec des entraînements similaires en cas de défaillance du complexe de laboratoire d'alimentation pourra ramener le bras avec l'instrument dans sa position d'origine, libérant ainsi le chirurgien humain l'accès au corps du patient.Pour les essais au banc, les ingénieurs ont préparé le prototype de système hybride le plus simple sans membres inférieurs. La partie supérieure du robot humanoïde a deux manipulateurs avec quatre degrés de liberté pour chacun. Des caméras stéréoscopiques miniatures sont installées sur la tête du robot, offrant au robot la possibilité d'un contact visuel avec l'environnement et, dans le cas du passage à la télécommande, la possibilité de transmettre une image de la réalité à un opérateur humain.La commande à distance du robot est rendue possible grâce à des contrôleurs portables spéciaux fournissant un retour d'informations. Portant un casque de réalité virtuelle, l'opérateur «efface ainsi la ligne» entre lui et le robot. Dans ce cas, ce dernier répète avec précision les mouvements de la personne, et la personne voit tout ce qui se passe devant l'œil de la caméra du robot. La précision de la répétition des mouvements et la résolution de la rétroaction sont telles qu'une personne utilisant les mains d'un robot pourra enfiler une aiguille dans l'œil et effectuer des manipulations ultra-précises similaires. En même temps, la vitesse de déplacement, la vitesse de réaction et le niveau de coordination seront suffisants pour effectuer des manipulations rapides - attraper la balle lancée, etc. «Les nouveaux disques hybrides confèrent au robot une fluidité et une vitesse de mouvement incroyables, lui permettant de manipuler des objets fragiles, d'interagir avec des personnes ou des animaux et d'effectuer des opérations très délicates», a déclaré Jessica Hodgins, vice-présidente de Disney Research et professeur de robotique à l'Université Carnegie - Melone, - «Maintenant, le robot ne peut fonctionner qu'avec l'aide de la télécommande. Mais il peut, tout en conservant tous les paramètres du mouvement mécanique, agir en mode automatique. Et des travaux dans ce sens sont déjà menés par nos spécialistes. »Les développeurs ont l'intention de parler plus en détail des nouveaux entraînements hybrides, de leurs caractéristiques et de leurs perspectives d'utilisation en robotique lors de la conférence internationale IEEE sur la robotique et l'automatisation ICRA 2016 (IEEE Conference on Robotics and Automation) à Stockholm.Source
«Les nouveaux disques hybrides confèrent au robot une fluidité et une vitesse de mouvement incroyables, lui permettant de manipuler des objets fragiles, d'interagir avec des personnes ou des animaux et d'effectuer des opérations très délicates», a déclaré Jessica Hodgins, vice-présidente de Disney Research et professeur de robotique à l'Université Carnegie - Melone, - «Maintenant, le robot ne peut fonctionner qu'avec l'aide de la télécommande. Mais il peut, tout en conservant tous les paramètres du mouvement mécanique, agir en mode automatique. Et des travaux dans ce sens sont déjà menés par nos spécialistes. »Les développeurs ont l'intention de parler plus en détail des nouveaux entraînements hybrides, de leurs caractéristiques et de leurs perspectives d'utilisation en robotique lors de la conférence internationale IEEE sur la robotique et l'automatisation ICRA 2016 (IEEE Conference on Robotics and Automation) à Stockholm.Source
C'est tout, avec vous, il y avait un service simple pour choisir un équipement Dronk.Ru complexe . N'oubliez pas de vous abonner à notre blog , il y aura bien d'autres choses intéressantes ...
Source: https://habr.com/ru/post/fr394609/
All Articles