Drone de course FPV DIY (partie 1) - assemblage
Aujourd'hui, la popularité des courses sur drones augmente rapidement. Les flyers amateurs se transforment en de sérieuses compétitions internationales, et le nombre de personnes impliquées dans ce passe-temps augmente en progression. J'ai moi-même récemment assemblé un quadricoptère FPV de la 180ème taille (la distance en mm entre les axes des moteurs en diagonale) et je m'empresse de partager cette expérience. J'ai décrit l'ensemble du processus d'assemblage et de configuration ici et ici , et ci-dessous sera une version légèrement modifiée contenant plus d'informations de mes articles précédents.Je laisserai de côté la question de rejoindre ce passe-temps et de passer directement au quadricoptère.
J'ai décrit l'ensemble du processus d'assemblage et de configuration ici et ici , et ci-dessous sera une version légèrement modifiée contenant plus d'informations de mes articles précédents.Je laisserai de côté la question de rejoindre ce passe-temps et de passer directement au quadricoptère.Sélection de la taille du quadcopter
Il y a un an, les quadrocoptères de la 250e taille étaient les plus populaires. Mais maintenant, les pilotes préfèrent assembler des appareils plus petits, ce qui est très raisonnable: le poids est moindre, mais la puissance est la même. J'ai choisi la 180e taille non pas pour des raisons pratiques, mais comme une sorte de défi d'assemblage.En fait, cette approche de la sélection n'est pas entièrement correcte. Il est beaucoup plus sage de choisir d'abord la taille des hélices, et déjà sous elles - le plus petit cadre où les hélices sélectionnées s'adapteront. Et avec cette approche, le 180e format est généralement rejeté. Jugez par vous-même: le format 210e vous permet de mettre les mêmes hélices de 5 pouces que le 250e, tandis que le quadric lui-même est plus facile, et les hélices de 4 pouces s'insèrent dans les 160e cadres. Il s'avère que la 180e taille est un format intermédiaire, qui n'est "ni le nôtre ni le vôtre". Il peut également être considéré comme pondéré 160e. Mais, néanmoins, je l'ai choisi. Peut-être parce que c'est la taille minimale qui peut tirer plus ou moins confortablement la caméra GoPro ou Runcam.Les accessoires
Commençons par les moteurs. L '«intermédiation» de la 180e taille, ainsi que la richesse de leur assortiment, compliquent le choix. D'une part, vous pouvez prendre ce qui se passe le 160e, d'autre part, ce qui est installé le 210e ou même le 250e. Il faut partir des hélices et de la batterie (le nombre de canettes). Je ne vois aucune raison d'utiliser une batterie 3S, et pour les hélices, les règles générales sont les suivantes:- besoin d'une poussée statique maximale - augmenter le diamètre de l'hélice et diminuer le pas (dans des limites raisonnables)
- besoin d'une vitesse élevée - réduire le diamètre et augmenter le pas (dans des limites raisonnables)
- vous avez besoin d'une poussée élevée avec un petit diamètre - ajoutez le nombre de pales (encore une fois dans des limites raisonnables, car si la différence entre les hélices à deux et trois pales est palpable, alors entre les hélices à trois et quatre pales, ce n'est pas si grand)
Dans mon cas, j'ai une limite de taille d'hélice de 4 pouces, mais je n'ai pas de limite de moteur. Il est donc très raisonnable d'utiliser des hélices à trois pales 4045 bullnose. Ils sont difficiles à équilibrer, mais avec eux, les commandes sont plus réactives et prévisibles, et le son est plus silencieux. En revanche, avec des hélices bipales, la vitesse du quadricoptère est plus élevée, mais je n'en ai absolument pas besoin. «Populairement» sur les années 180, les configurations suivantes prévalent:- léger avec moteurs 1306-3100KV, hélices 4045 conventionnelles et batterie 850mAh
- lourd et puissant pour les hélices à trois pales et une caméra d'action avec des moteurs 2205-2600KV et une batterie 1300mAh
En fait, le cadre vous permet de mettre des moteurs de 1306-4000KV à 22XX-2700KV. Soit dit en passant, je ne sais pas pourquoi, mais les moteurs 1806-2300KV sont maintenant en disgrâce et sont peu utilisés.J'ai pris les moteurs pour mon quadric - RCX H2205 2633KV . Tout d'abord, je voulais avoir une marge de puissance (bien qu'avec mes modestes compétences de pilotage, on ne sait pas pourquoi). Deuxièmement, mes configurations ne se sont jamais révélées super-légères, en plus je prévois également de porter une caméra d'action. Plus précisément, les moteurs RCX sont une option de compromis. Ils sont bon marché, mais il y a beaucoup de plaintes concernant la qualité. Au moment de l'achat des composants, il s'agissait de l'un des rares moteurs 2205-2600KV sur le marché. Maintenant (au moment de la rédaction), la gamme est beaucoup plus large et il vaut mieux choisir autre chose.Avec le reste des composants, il a agi sur le principe de "plus de challenge":- RC180 V2. ( 2-3 ), , 3. , , , , 1-2 .
- FrSky D4R-II. FrSky X4R-SB, , . , . .
- FVT LittleBee 20A — , . - FVT LittleBee 20A PRO Silabs F396 ( , Silabs F330), FVT LittleBee 20A-S, BLHeli_S. LittleBee 20A.
- Foxeer FX799T — , .
- Sony Super HAD CCD 600TVL (IR Block, NTSC, 2.8). Foxeer XAT600M, .
- Diatone.
- -«» BeeRotor -.
- MICRO MinimOSD.
- , . Matek Mini Power Hub, . , 3S, PBD .
- Turnigy nano-tech 1300mAh 4S 45~90C.
- ZG 12Bit WS2812B LED Board. , , - ( ) . .
- DYS 3-blade 4040 Bullnose.
Sélection du contrôleur de vol
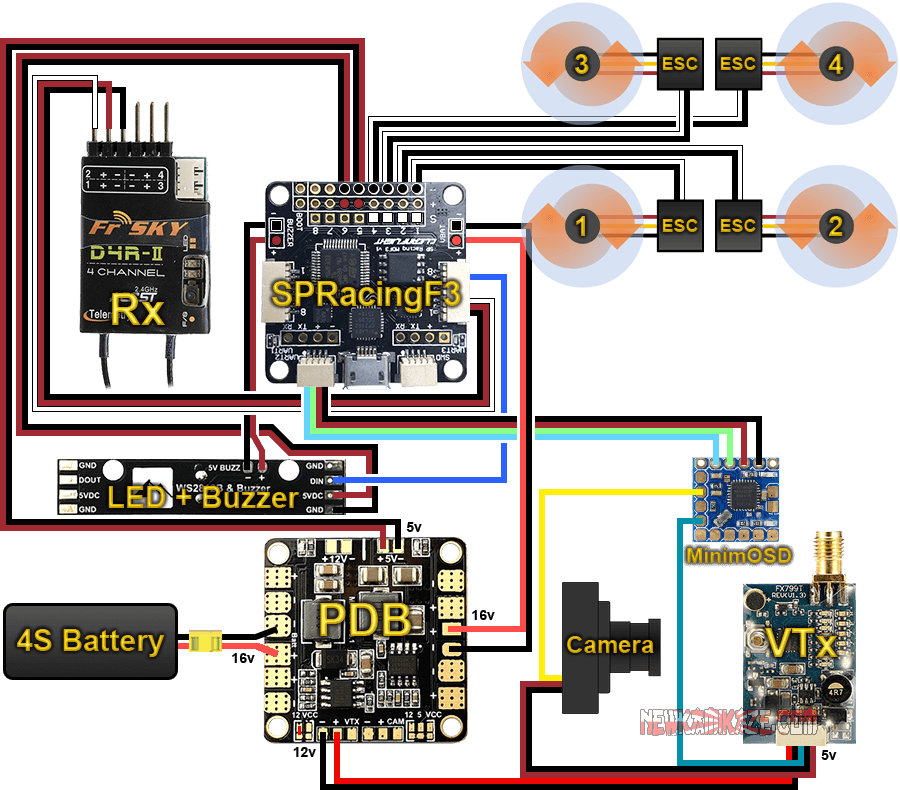
Vous avez probablement remarqué qu'il n'y a pas de contrôleur de vol dans la liste. Je veux décrire son choix plus en détail. Les kits de construction à faible coût incluent souvent un contrôleur CC3D, donc actuellement c'est probablement le PC le moins cher. Aujourd'hui, il est absolument inutile d'acheter un CC3D. Il est obsolète et n'a pas de choses nécessaires comme la surveillance de la batterie et le «tweeter». Son successeur, CC3D Revolution, est un produit complètement différent avec des fonctionnalités riches, mais aussi au prix de plus de 40 €.Les contrôleurs de vol modernes sont déjà passés des processeurs F1 au F3, ce qui a rendu la dernière génération de PC Naze32 et a considérablement réduit son prix. Maintenant, c'est vraiment un contrôleur folk qui a presque tout ce que l'âme désire à un prix de 12 € ou plus.De la nouvelle génération de PC, Ser sérieusement Pro Racing F3 est le plus populaire, et tout d'abord, en raison de la disponibilité de clones peu coûteux. Le contrôleur lui-même n'est en aucun cas inférieur à Naze32, en outre, il dispose d'un processeur F3 rapide, d'une grande quantité de mémoire, de trois ports UART et d'un onduleur pour S.Bus. C'est SPRacingF3 Acro que j'ai choisi. Le reste des PC modernes n'a pas été pris en compte en raison du prix ou de certaines fonctionnalités spécifiques (firmware fermé, disposition, etc.).Je noterai séparément la tendance actuelle à la mode de combiner plusieurs cartes en une. Le plus souvent, PC et OSD ou PC et PDB, je ne supporte pas cette idée à quelques exceptions près. Je ne veux pas changer tout le contrôleur de vol en raison d'un OSD brûlé. De plus, comme le montre la pratique, une telle union pose parfois des problèmes .Schéma de câblage
Il est clair que tous les composants qui nécessitent une alimentation 5V ou 12V la recevront des BEC du tableau de distribution électrique. La caméra pourrait théoriquement être alimentée directement à partir d'une batterie 4S, car la tension d'entrée le permet, mais en aucun cas cela ne devrait être fait. Tout d'abord, toutes les caméras sont très sensibles au bruit dans le circuit des régulateurs, ce qui entraînera des interférences dans l'image. Deuxièmement, les régulateurs à freinage actif (comme ma LittleBee), lorsque ce freinage est activé, donnent une impulsion très grave au réseau de bord, ce qui peut brûler la caméra. De plus, la présence d'une impulsion dépend directement de l'usure de la batterie. Les nouveaux ne le font pas, mais les anciens le font. Voici une vidéo informative sur le sujet des interférences des régulateurs et comment les filtrer. Il est donc préférable d'alimenter la caméra à partir de BEC ou d'un émetteur vidéo.De plus, afin d'améliorer la qualité de l'image, il est recommandé d'utiliser non seulement un fil de signal de la caméra sur l'OSD, mais également le sol. Si vous tordez ces fils en une «queue de cochon», la «terre» agit comme un écran pour le fil de signal. Certes, dans ce cas, je ne l'ai pas fait.Si nous parlons déjà de la "masse", on se demande souvent s'il faut connecter la "masse" des régulateurs à un PC ou à un seul fil de signal. Sur un quadricoptère de course conventionnel, vous devez absolument vous connecter. Son absence peut entraîner des échecs de synchronisation ( confirmation ).Le schéma de câblage final s'est avéré simple et concis, mais avec quelques nuances:- alimentation du contrôleur de vol (5V) à partir de la PDB via les sorties des régulateurs
- alimentation de la radio (5V) depuis le PC via le connecteur OI_1
- alimentation d'un émetteur vidéo (12V) depuis PDB
- alimentation de la caméra (5 V) à partir d'un émetteur vidéo
- OSD connecté à UART2. Beaucoup de gens utilisent UART1 pour cela, mais comme sur Naze32, ici ce connecteur est parallèle à USB.
- Vbat est connecté au PC, pas à l'OSD. En théorie, les lectures de tension de la batterie (vbat) peuvent être lues à la fois sur l'OSD et le PC, en connectant la batterie à l'un ou à l'autre. Quelle est la différence? Dans le premier cas, les relevés ne seront présents que sur l'écran du moniteur ou des lunettes et le PC n'en saura rien. Dans le second cas, le PC peut surveiller la tension de la batterie, en informer le pilote (par exemple, «squeaker»), et également transférer ces données à l'OSD, à la «boîte noire» et par télémétrie à la télécommande. L'ajustement de la précision des lectures est également plus facile via un PC. Autrement dit, la connexion de vbat au contrôleur de vol est de loin préférable.
Assemblage
Pour commencer, voici quelques conseils d'assemblage général:- . , .
- , , , . , , . , .
- PLASTIK 71, . , , .
- . .
- «» ().
Je préfère commencer l'assemblage avec des moteurs et des régulateurs. Voici une bonne vidéo sur l'assemblage d'un petit quadricoptère, à partir de laquelle j'ai adopté l'idée de disposer les fils des moteurs.Je voudrais également dire sur le montage des régulateurs: où et avec quoi? Ils peuvent être fixés sur et sous la poutre. J'ai choisi la première option, car il me semble que dans cette position le régulateur est plus protégé (ce sont mes spéculations, non confirmées par la pratique). De plus, lorsqu'il est monté sur une poutre, le régulateur est parfaitement refroidi par l'air de l'hélice. Maintenant, comment réparer le régulateur. Il existe de nombreuses façons, les plus populaires - du ruban adhésif double face + une ou deux chapes. «Bon marché et gai», d'ailleurs, le démantèlement des difficultés ne provoquera pas. Pire, avec une telle attache, vous pouvez endommager la carte du régulateur (si vous y mettez un coupleur) ou les fils (si vous les fixez). J'ai donc décidé de fixer les régulateurs avec un tube thermorétractable (25 mm) et de les souder avec les poutres. Il y a une mise en garde: le régulateur lui-même doit également être thermorétractable (le mien y a été vendu),afin de ne pas entrer en contact avec la fibre de carbone du faisceau, sinon - court-circuit. Il est également judicieux de coller un morceau de ruban adhésif double face par-dessous sur chaque faisceau au niveau du support moteur. Premièrement, il protégera le roulement du moteur de la poussière. Deuxièmement, si pour une raison quelconque l'un des boulons est dévissé, il ne tombera pas pendant le vol et ne sera pas perdu.Lors de l'assemblage du cadre, je n'ai pas utilisé un seul boulon du kit, car ils sont tous indécemment courts. Au lieu de cela, je suis devenu un peu plus long et avec une tête pour un tournevis cruciforme (il y a une telle préférence personnelle).La caméra ne correspondait pas à la largeur entre les plaques latérales du cadre. Légèrement traité les bords de sa planche avec un fichier (il était plus susceptible de broyer la rugosité) et elle se leva sans aucun problème. Mais les difficultés ne s'arrêtent pas là. J'ai vraiment aimé la qualité du support pour l'appareil photo de Diatone, mais l'appareil photo avec lui ne tenait pas dans le cadre en hauteur (environ 8-10 mm). Tout d'abord, j'ai épinglé le support sur le côté extérieur (supérieur) de la plaque à travers un amortisseur en néoprène, mais la conception s'est avérée peu fiable. Plus tard est venue l'idée de la fixation la plus simple et la plus fiable. Je n'ai pris qu'une pince de la monture Diatone et je l'ai mise sur un morceau de tige avec filetage M3. Pour empêcher la caméra de se déplacer latéralement, j'ai fixé la pince avec des accouplements en nylon.
Il est également judicieux de coller un morceau de ruban adhésif double face par-dessous sur chaque faisceau au niveau du support moteur. Premièrement, il protégera le roulement du moteur de la poussière. Deuxièmement, si pour une raison quelconque l'un des boulons est dévissé, il ne tombera pas pendant le vol et ne sera pas perdu.Lors de l'assemblage du cadre, je n'ai pas utilisé un seul boulon du kit, car ils sont tous indécemment courts. Au lieu de cela, je suis devenu un peu plus long et avec une tête pour un tournevis cruciforme (il y a une telle préférence personnelle).La caméra ne correspondait pas à la largeur entre les plaques latérales du cadre. Légèrement traité les bords de sa planche avec un fichier (il était plus susceptible de broyer la rugosité) et elle se leva sans aucun problème. Mais les difficultés ne s'arrêtent pas là. J'ai vraiment aimé la qualité du support pour l'appareil photo de Diatone, mais l'appareil photo avec lui ne tenait pas dans le cadre en hauteur (environ 8-10 mm). Tout d'abord, j'ai épinglé le support sur le côté extérieur (supérieur) de la plaque à travers un amortisseur en néoprène, mais la conception s'est avérée peu fiable. Plus tard est venue l'idée de la fixation la plus simple et la plus fiable. Je n'ai pris qu'une pince de la monture Diatone et je l'ai mise sur un morceau de tige avec filetage M3. Pour empêcher la caméra de se déplacer latéralement, j'ai fixé la pince avec des accouplements en nylon.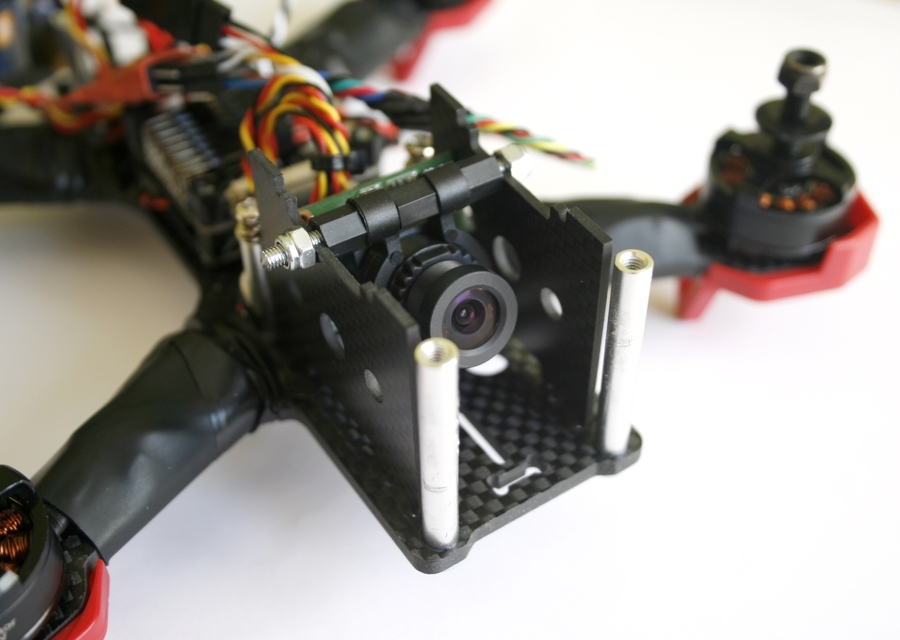 J'ai beaucoup aimé que seuls les connecteurs des régulateurs devaient être soudés à partir des connecteurs du PC. Les connecteurs à trois broches ne correspondaient pas à ma taille, j'ai dû aller à l'astuce et utiliser ceux à deux broches. Pour les cinq premiers canaux (4 pour les régulateurs + 1 «pour chaque pompier»), j'ai soudé les connecteurs au pavé de signalisation et à la «masse», pour les trois autres - aux «plus» et «masse» afin que le PC lui-même puisse être alimenté et déjà à partir de celui-ci. - rétro-éclairage. Étant donné que les clones chinois de contrôleurs de vol pèchent par une fixation peu fiable du connecteur USB, je l'ai également soudé. Une autre caractéristique caractéristique du clone SPRacingF3 est le connecteur de tweeter. Comme dans le cas de vbat, sur le côté supérieur de la carte, il y a un connecteur JST-XH à deux broches, et sur le côté inférieur, il est dupliqué par les plots de contact. L'astuce estque le clone «terre» sur le connecteur est constant et lorsqu'il est utilisé, le «tweeter» sera toujours activé. Le fonctionnement normal du "tweeter" "terre" est affiché uniquement sur la plage de contact. Ceci est facilement vérifié par le testeur: le «plus» du connecteur appelle avec un «plus» sur la plage de contact, et le «moins» - n'appelle pas. Par conséquent, vous devez souder les fils du "tweeter" au bas du PC.
J'ai beaucoup aimé que seuls les connecteurs des régulateurs devaient être soudés à partir des connecteurs du PC. Les connecteurs à trois broches ne correspondaient pas à ma taille, j'ai dû aller à l'astuce et utiliser ceux à deux broches. Pour les cinq premiers canaux (4 pour les régulateurs + 1 «pour chaque pompier»), j'ai soudé les connecteurs au pavé de signalisation et à la «masse», pour les trois autres - aux «plus» et «masse» afin que le PC lui-même puisse être alimenté et déjà à partir de celui-ci. - rétro-éclairage. Étant donné que les clones chinois de contrôleurs de vol pèchent par une fixation peu fiable du connecteur USB, je l'ai également soudé. Une autre caractéristique caractéristique du clone SPRacingF3 est le connecteur de tweeter. Comme dans le cas de vbat, sur le côté supérieur de la carte, il y a un connecteur JST-XH à deux broches, et sur le côté inférieur, il est dupliqué par les plots de contact. L'astuce estque le clone «terre» sur le connecteur est constant et lorsqu'il est utilisé, le «tweeter» sera toujours activé. Le fonctionnement normal du "tweeter" "terre" est affiché uniquement sur la plage de contact. Ceci est facilement vérifié par le testeur: le «plus» du connecteur appelle avec un «plus» sur la plage de contact, et le «moins» - n'appelle pas. Par conséquent, vous devez souder les fils du "tweeter" au bas du PC.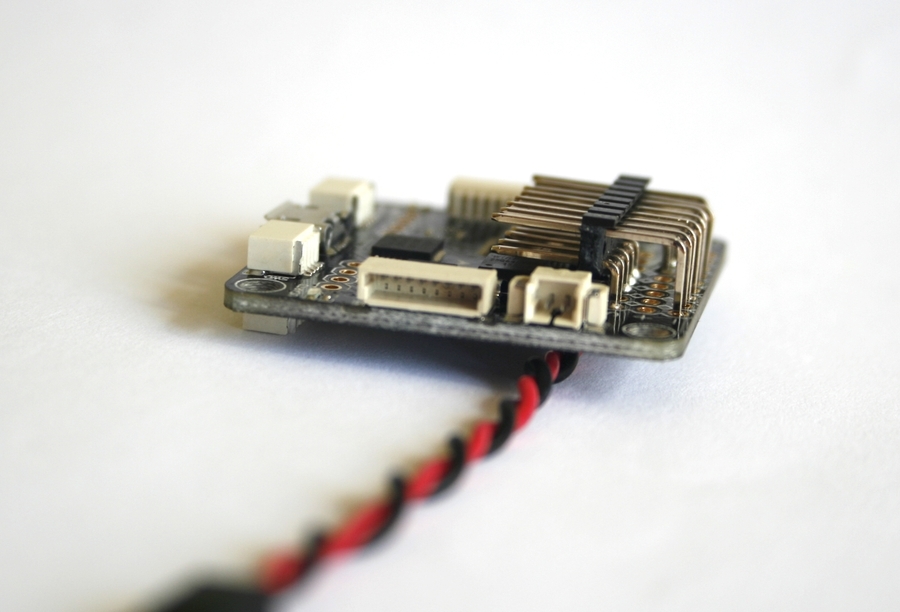 Les connecteurs à trois broches des régulateurs ont également dû être remplacés. Il était possible d'utiliser quatre fiches à deux broches, mais à la place, j'ai pris deux fiches à quatre broches et inséré tous les contrôleurs dans une «masse», et un fil de signal dans le second (en suivant l'ordre de connexion des moteurs).
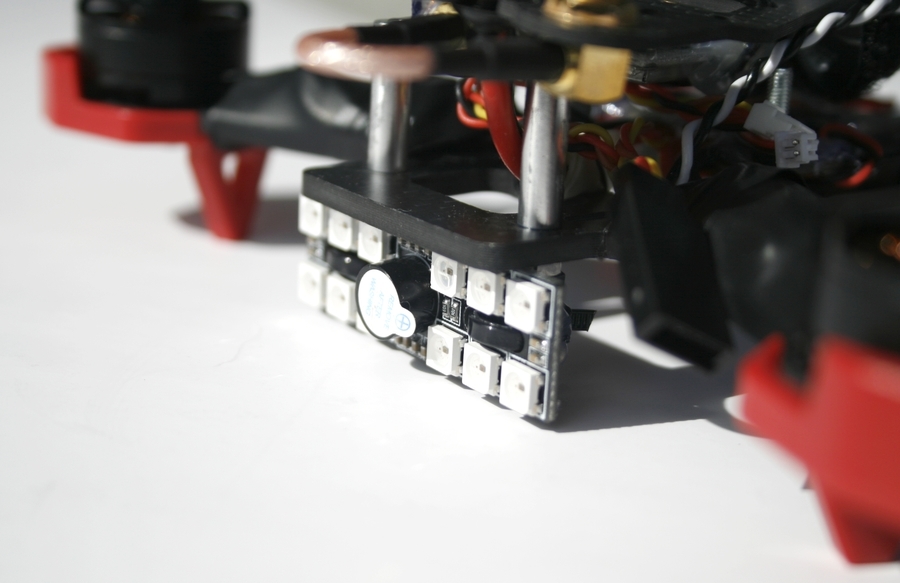
Les connecteurs à trois broches des régulateurs ont également dû être remplacés. Il était possible d'utiliser quatre fiches à deux broches, mais à la place, j'ai pris deux fiches à quatre broches et inséré tous les contrôleurs dans une «masse», et un fil de signal dans le second (en suivant l'ordre de connexion des moteurs).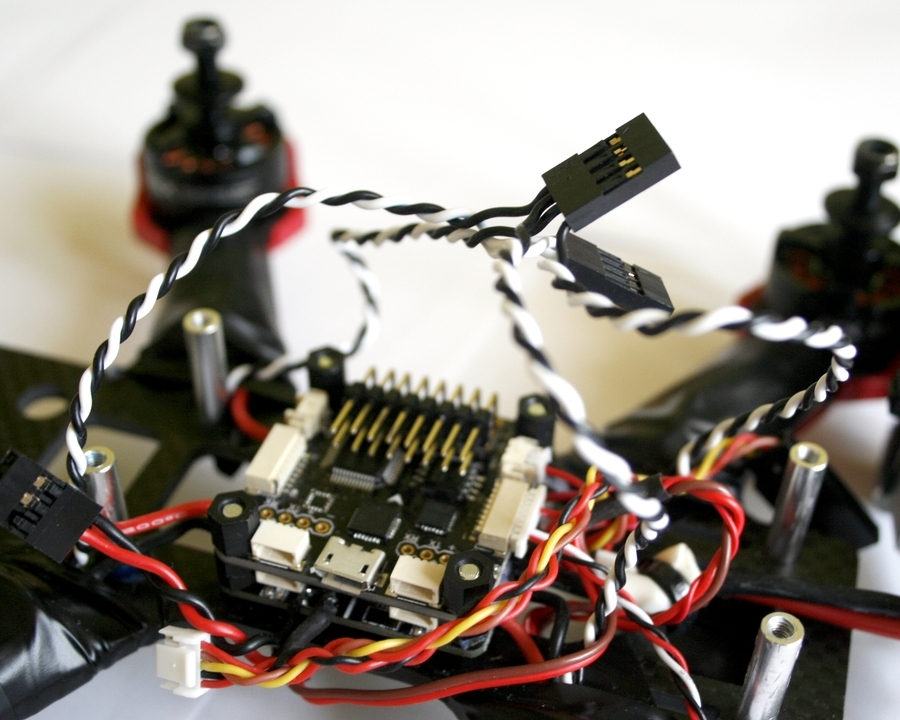 La plaque rétro-éclairée est plus large que le cadre et dépasse sur les côtés. Le seul endroit où les hélices ne le heurteront pas est sous le châssis. Je devais faire de la ferme collective: j'ai pris de longs boulons, je leur ai mis des accouplements en nylon avec des fentes préfabriquées (pour que les attaches fixant le rétroéclairage puissent se verrouiller) et je les ai vissés à travers la plaque inférieure dans les supports de cadre. Il a tiré la plaque avec des LED sur les jambes résultantes avec des liens (les trous dans la plaque s'adaptent parfaitement) et a rempli les liens avec de la colle chaude. À l'arrière des connecteurs soudés à la plaque.Déjà après l'assemblage, au stade de la configuration, il s'est avéré que quelque chose n'allait pas avec le grinceur. Immédiatement après avoir connecté la batterie, elle a commencé à grincer de façon monotone, et si vous l'activez à partir de la télécommande, alors ce grincement monotone a été superposé également rythmique. Au début, j'ai péché sur un PC, mais après avoir mesuré la tension avec un multimètre, il est devenu clair où se trouvait exactement le problème. En fait, dès le début, il était possible de connecter une LED régulière aux fils du tweeter. En conséquence, j'ai commandé plusieurs tweeters à la fois, les ai écoutés et mis le plus fort.
La plaque rétro-éclairée est plus large que le cadre et dépasse sur les côtés. Le seul endroit où les hélices ne le heurteront pas est sous le châssis. Je devais faire de la ferme collective: j'ai pris de longs boulons, je leur ai mis des accouplements en nylon avec des fentes préfabriquées (pour que les attaches fixant le rétroéclairage puissent se verrouiller) et je les ai vissés à travers la plaque inférieure dans les supports de cadre. Il a tiré la plaque avec des LED sur les jambes résultantes avec des liens (les trous dans la plaque s'adaptent parfaitement) et a rempli les liens avec de la colle chaude. À l'arrière des connecteurs soudés à la plaque.Déjà après l'assemblage, au stade de la configuration, il s'est avéré que quelque chose n'allait pas avec le grinceur. Immédiatement après avoir connecté la batterie, elle a commencé à grincer de façon monotone, et si vous l'activez à partir de la télécommande, alors ce grincement monotone a été superposé également rythmique. Au début, j'ai péché sur un PC, mais après avoir mesuré la tension avec un multimètre, il est devenu clair où se trouvait exactement le problème. En fait, dès le début, il était possible de connecter une LED régulière aux fils du tweeter. En conséquence, j'ai commandé plusieurs tweeters à la fois, les ai écoutés et mis le plus fort.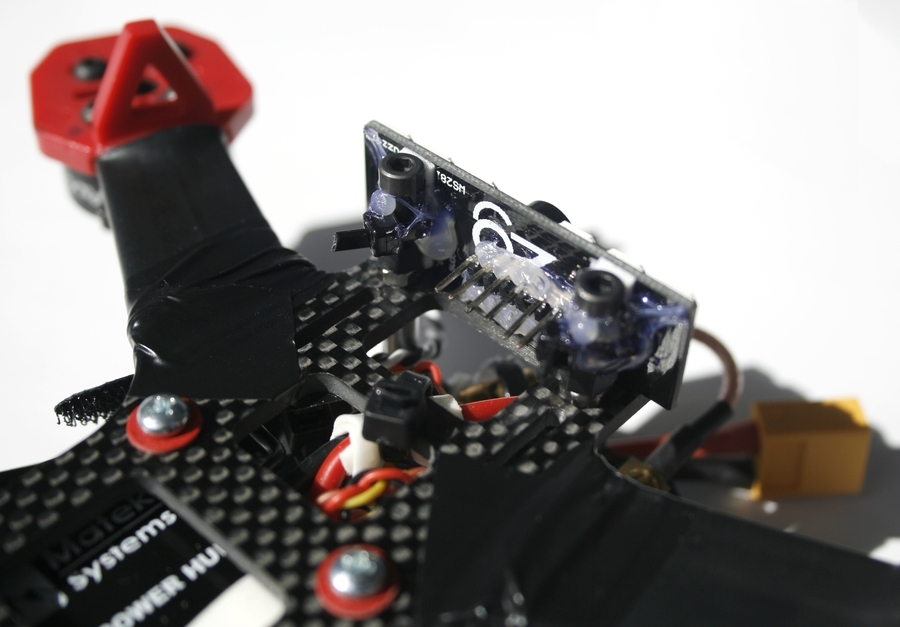
 Souvent, le PDB et le contrôleur sont fixés au châssis avec des boulons en nylon, mais je ne fais pas confiance à leur solidité. J'ai donc utilisé des boulons métalliques de 20 mm et des raccords en nylon. Après avoir installé la PDB, j'ai soudé le courant aux régulateurs (les autres fils ont été soudés à l'avance) et rempli les points de soudure avec de la colle chaude. J'ai attaché le câble d'alimentation principal menant à la batterie au châssis afin qu'il ne soit pas arraché en cas d'accident.
Souvent, le PDB et le contrôleur sont fixés au châssis avec des boulons en nylon, mais je ne fais pas confiance à leur solidité. J'ai donc utilisé des boulons métalliques de 20 mm et des raccords en nylon. Après avoir installé la PDB, j'ai soudé le courant aux régulateurs (les autres fils ont été soudés à l'avance) et rempli les points de soudure avec de la colle chaude. J'ai attaché le câble d'alimentation principal menant à la batterie au châssis afin qu'il ne soit pas arraché en cas d'accident.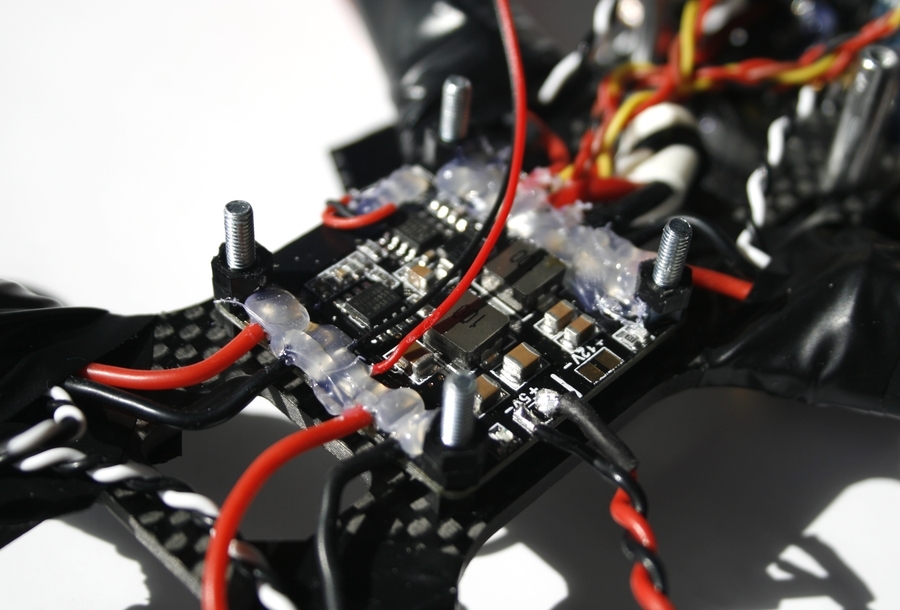 J'ai retiré tous les connecteurs du récepteur avec une paire de pinces, à l'exception des trois nécessaires, et j'ai retiré le cavalier entre les troisième et quatrième canaux directement sur la carte. Comme je l'ai écrit plus haut, il serait plus judicieux de prendre un récepteur sans connecteurs. J'ai également déployé des antennes sur lui et j'ai fondu en thermorétractable. Sur le châssis, le récepteur s'intègre bien entre le PBD et le montant arrière. Avec cet agencement, ses indicateurs sont clairement visibles et il y a accès au bouton d'affectation.
J'ai retiré tous les connecteurs du récepteur avec une paire de pinces, à l'exception des trois nécessaires, et j'ai retiré le cavalier entre les troisième et quatrième canaux directement sur la carte. Comme je l'ai écrit plus haut, il serait plus judicieux de prendre un récepteur sans connecteurs. J'ai également déployé des antennes sur lui et j'ai fondu en thermorétractable. Sur le châssis, le récepteur s'intègre bien entre le PBD et le montant arrière. Avec cet agencement, ses indicateurs sont clairement visibles et il y a accès au bouton d'affectation.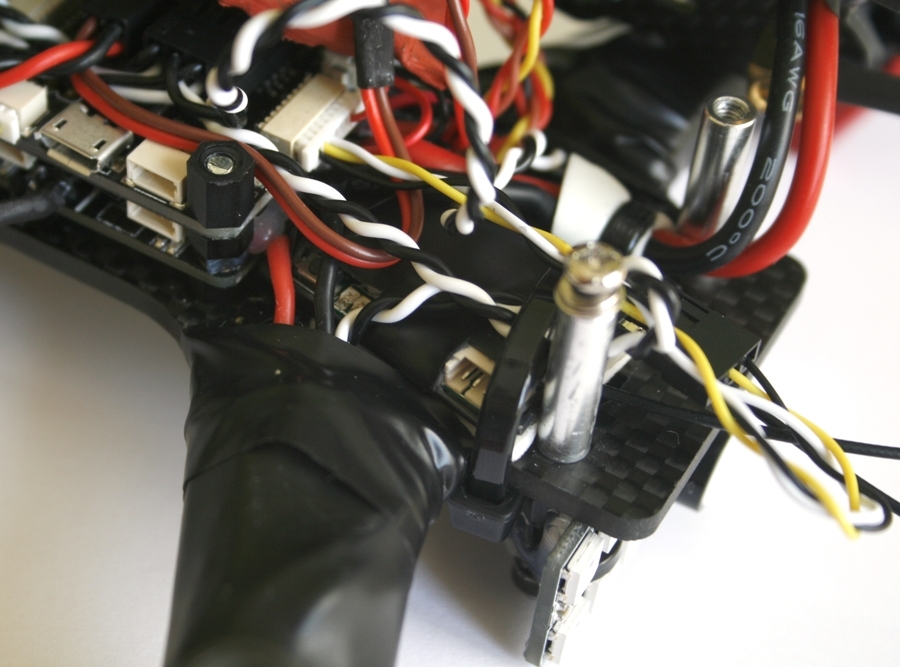 J'ai fixé l'émetteur vidéo avec des attaches et de la colle chaude sur la plaque supérieure du cadre de sorte que par la fente il y avait accès au bouton de commutation de canal et aux indicateurs LED.
J'ai fixé l'émetteur vidéo avec des attaches et de la colle chaude sur la plaque supérieure du cadre de sorte que par la fente il y avait accès au bouton de commutation de canal et aux indicateurs LED. Il y a un trou spécial dans le cadre pour fixer l'antenne de l'émetteur vidéo. Mais ne le connectez pas directement à l'émetteur. Il se révèle une sorte de levier, où l'antenne sert d'épaule, l'émetteur lui-même avec tous les fils comme l'autre, et le point de fixation du connecteur sera le point d'appui, qui aura une charge maximale. Ainsi, en cas d'accident avec une probabilité proche de 100%, le connecteur de la carte émetteur se casse. Par conséquent, vous devez monter l'antenne à l'aide d'une sorte d'adaptateur ou de rallonge.Pour MinimOSD, j'ai décidé de souder les connecteurs, pas les fils directement. Sur les forums, ils écrivent que cette carte brûle souvent, il est donc sage de se préparer immédiatement à un éventuel remplacement. J'ai pris la barre avec des connecteurs en deux rangées, j'ai soudé les barres inférieures aux tampons avec des trous et j'ai apporté vIn et vOut aux barres supérieures. Après cela, il a rempli les points de soudure avec de la colle chaude et a emballé toute la carte sous thermorétractable.
Il y a un trou spécial dans le cadre pour fixer l'antenne de l'émetteur vidéo. Mais ne le connectez pas directement à l'émetteur. Il se révèle une sorte de levier, où l'antenne sert d'épaule, l'émetteur lui-même avec tous les fils comme l'autre, et le point de fixation du connecteur sera le point d'appui, qui aura une charge maximale. Ainsi, en cas d'accident avec une probabilité proche de 100%, le connecteur de la carte émetteur se casse. Par conséquent, vous devez monter l'antenne à l'aide d'une sorte d'adaptateur ou de rallonge.Pour MinimOSD, j'ai décidé de souder les connecteurs, pas les fils directement. Sur les forums, ils écrivent que cette carte brûle souvent, il est donc sage de se préparer immédiatement à un éventuel remplacement. J'ai pris la barre avec des connecteurs en deux rangées, j'ai soudé les barres inférieures aux tampons avec des trous et j'ai apporté vIn et vOut aux barres supérieures. Après cela, il a rempli les points de soudure avec de la colle chaude et a emballé toute la carte sous thermorétractable. La touche finale est l'autocollant du numéro de téléphone. Cela donnera au moins un peu d'espoir en cas de perte d'un quadricoptère.
La touche finale est l'autocollant du numéro de téléphone. Cela donnera au moins un peu d'espoir en cas de perte d'un quadricoptère. L'assemblée à ce sujet a pris fin. Il s'est avéré être compact et en même temps, l'accès à tous les organes directeurs nécessaires a été préservé. Plus de photos peuvent être vues ici.. La masse du quadrocoprera sans batterie est de 330g, avec une batterie - 470g. Et cela sans caméra d'action et se monte pour elle. Dans le prochain article, je parlerai du firmware et du réglage du quadricoptère résultant.
L'assemblée à ce sujet a pris fin. Il s'est avéré être compact et en même temps, l'accès à tous les organes directeurs nécessaires a été préservé. Plus de photos peuvent être vues ici.. La masse du quadrocoprera sans batterie est de 330g, avec une batterie - 470g. Et cela sans caméra d'action et se monte pour elle. Dans le prochain article, je parlerai du firmware et du réglage du quadricoptère résultant. Source: https://habr.com/ru/post/fr395455/
All Articles