«L'origine du projet. Partie 1.1. Comment j'ai assemblé un robot de téléprésence sur un empattement. » Technologie d'endurance
Projet: Endurance Robots & Lasers Technologies.Article n ° 1. «L'origine du projet. Partie 1.1. Comment j'ai assemblé un robot de téléprésence sur un empattement. »En 2015, les membres de notre future équipe ont réussi à gagner suffisamment d'argent pour risquer leur temps à long terme (ils ont déterminé un horizon de planification de 1 an). Et nous avons décidé d'organiser une startup. S'engager dans les ventes? Nooo, startup technologique! A savoir, le développement de robots et de lasers à semi-conducteurs d'une puissance de l'ordre de 1-10 watts.J'ai tout de suite aimé l'idée d'être au bon moment dans un endroit intéressant sur des milliers de kilomètres et j'aime toujours! Nous aimons tous le streaming en direct. Et grâce au robot, je contrôle également la direction de mon regard, mes allées et venues. Par conséquent, en 2015, lorsque nous avons lancé le projet Endurance Robots, j'ai décidé de développer un robot de téléprésence sur roues. L'empattement vous permettra de vous déplacer dans la pièce ou dans la rue, et la téléprésence assurera la pertinence de ce qui se passe autour de la situation. Le but ultime: la réalité virtuelle complète, un robot contrôlé par une personne à l'aide de lunettes Oculus rift! Feu!))Pour commencer, j'ai recherché et étudié les offres disponibles sur le marché international: PadBot (Chine), BotEyes (Russie), Double Robotics (USA), Webot (Russie), OrigiBot (USA), Oculus (Canada), Anybot (USA), RBOT Synergy (Russie), et compilé un tableau des caractéristiques comparatives des robots. Les robots différaient dans leur fonctionnalité: la capacité de prendre des objets avec un manipulateur (une canette de bière du réfrigérateur :), de surmonter des obstacles élevés, de charger de manière autonome, etc. Naturellement, le prix flottait et variait de 1000 $ à 10000 $. Par la suite, j'ai réalisé que les appareils bon marché jusqu'à 5000 $ sont des plates-formes robotiques contrôlées par un opérateur humain, mais pas des robots autonomes, capables de prendre des décisions de manière indépendante dans un environnement changeant: s'approcher d'un obstacle, parcourir un itinéraire d'un point A à un point B, reconnaissance des commandes vocales.Notre équipe Endurance Robots a décidé d'entrer sur le marché des plates-formes de classe économique jusqu'à 2000 $. Sur la base du tableau des caractéristiques comparatives, j'ai déterminé les caractéristiques de l'appareil qui doivent être atteintes en premier lieu, à savoir: la durée de vie de la batterie (à partir de 8 heures, une journée entière de travail), surmonter les obstacles (jusqu'à 3,5 centimètres de haut, seuil de porte avant), transmission fiable commandes de contrôle via Internet, communications vidéo et audio de haute qualité. Un participant au projet a insisté pour fabriquer un corps de robot à partir d'un mannequin féminin et installer une tablette entre les seins. Nous avons même acheté un torse d'occasion sans bras, jambes et tête pour 2 $ (un nouveau mannequin à part entière coûte environ 100 $), mais en raison d'un budget limité, cette idée est finalement morte.ce qui doit être réalisé en premier lieu, à savoir: autonomie de la batterie (à partir de 8 heures, toute une journée de travail), surmonter les obstacles (jusqu'à 3,5 centimètres de haut, seuil de la porte d'entrée), transmission fiable des commandes de contrôle via Internet, vidéo de haute qualité et communication audio. Un participant au projet a insisté pour fabriquer un corps de robot à partir d'un mannequin féminin et installer une tablette entre les seins. Nous avons même acheté un torse d'occasion sans bras, jambes et tête pour 2 $ (un nouveau mannequin à part entière coûte environ 100 $), mais en raison d'un budget limité, cette idée est finalement morte.qui doit être atteint en premier lieu, à savoir: la durée de vie de la batterie (à partir de 8 heures, toute une journée de travail), surmonter les obstacles (jusqu'à 3,5 centimètres de haut, seuil de la porte d'entrée), la transmission fiable des commandes de contrôle via Internet, la vidéo de haute qualité et communication audio. Un participant au projet a insisté pour fabriquer un corps de robot à partir d'un mannequin féminin et installer une tablette entre les seins. Nous avons même acheté un torse d'occasion sans bras, jambes et tête pour 2 $ (un nouveau mannequin à part entière coûte environ 100 $), mais en raison d'un budget limité, cette idée est finalement morte.Un participant au projet a insisté pour fabriquer un corps de robot à partir d'un mannequin féminin et installer une tablette entre les seins. Nous avons même acheté un torse d'occasion sans bras, jambes et tête pour 2 $ (un nouveau mannequin à part entière coûte environ 100 $), mais en raison d'un budget limité, cette idée est finalement morte.Un participant au projet a insisté pour fabriquer un corps de robot à partir d'un mannequin féminin et installer une tablette entre les seins. Nous avons même acheté un torse d'occasion sans bras, jambes et tête pour 2 $ (un nouveau mannequin à part entière coûte environ 100 $), mais en raison d'un budget limité, cette idée est finalement morte. Au cours du test de la demande, il est devenu clair que les gens recherchent non seulement une tablette sur roues, mais plutôt une plate-forme robotique pouvant effectuer des tâches intellectuelles humaines: reconnaître les objets et la parole (technologie OpenCV open source), répondre correctement aux questions (AI), pour surmonter l'itinéraire vers le sujet, capturer le sujet et le transférer vers la destination. Autrement dit, l'empattement n'est pas le principal, mais un ajout nécessaire à ce que nous proposons. Stratégiquement, l'empattement reste le principal facteur de forme. Par analogie, un ordinateur portable -> tablette. C'est-à-dire une nouvelle forme est un nouveau produit.
Au cours du test de la demande, il est devenu clair que les gens recherchent non seulement une tablette sur roues, mais plutôt une plate-forme robotique pouvant effectuer des tâches intellectuelles humaines: reconnaître les objets et la parole (technologie OpenCV open source), répondre correctement aux questions (AI), pour surmonter l'itinéraire vers le sujet, capturer le sujet et le transférer vers la destination. Autrement dit, l'empattement n'est pas le principal, mais un ajout nécessaire à ce que nous proposons. Stratégiquement, l'empattement reste le principal facteur de forme. Par analogie, un ordinateur portable -> tablette. C'est-à-dire une nouvelle forme est un nouveau produit. La tâche à la première étape est de développer un empattement: peu coûteux (pas plus de 200 $ pour une production à petite échelle), efficace (qui se déplacerait de manière fiable, aurait la modularité et la capacité de réparer rapidement), simple (similaire à ce que le téléphone a installé, l'application téléchargée et le système fonctionne ), fiable (logiciel, matériel), qui peut être amélioré à l'avenir. L'opérateur doit pouvoir envoyer des signaux aux moteurs électriques et aux servos via Internet.Donc, PRINCIPES DE BASE d'un design.- La polyvalence de la plate-forme à la "véhicule tout terrain" n'est pas recherchée. Modèle environnemental = intérieur. La surface est plate (stratifié, carrelage, bois, béton, linoléum), obstacles jusqu'à 1 cm.- Priorité dans l'ordre suivant: attractivité, ergonomie et simplicité, mobilité.- Création d'un prototype modélisé pour la production industrielle.- Fiabilité au quotidien (1 an)- Remplaçabilité ou complémentarité (mettre un deuxième haut-parleur ou un deuxième appareil photo est là).- La polyvalence des fixations.- Mouvement rectiligne, pas en zigzags.- Bruit et vibrations inférieurs à 10 décibels.- Collapsibilité et facilité de construction pour le transfert d'un bâtiment à un autre.
La tâche à la première étape est de développer un empattement: peu coûteux (pas plus de 200 $ pour une production à petite échelle), efficace (qui se déplacerait de manière fiable, aurait la modularité et la capacité de réparer rapidement), simple (similaire à ce que le téléphone a installé, l'application téléchargée et le système fonctionne ), fiable (logiciel, matériel), qui peut être amélioré à l'avenir. L'opérateur doit pouvoir envoyer des signaux aux moteurs électriques et aux servos via Internet.Donc, PRINCIPES DE BASE d'un design.- La polyvalence de la plate-forme à la "véhicule tout terrain" n'est pas recherchée. Modèle environnemental = intérieur. La surface est plate (stratifié, carrelage, bois, béton, linoléum), obstacles jusqu'à 1 cm.- Priorité dans l'ordre suivant: attractivité, ergonomie et simplicité, mobilité.- Création d'un prototype modélisé pour la production industrielle.- Fiabilité au quotidien (1 an)- Remplaçabilité ou complémentarité (mettre un deuxième haut-parleur ou un deuxième appareil photo est là).- La polyvalence des fixations.- Mouvement rectiligne, pas en zigzags.- Bruit et vibrations inférieurs à 10 décibels.- Collapsibilité et facilité de construction pour le transfert d'un bâtiment à un autre. CARACTÉRISTIQUES TECHNIQUES d'un design.- Vitesse maximale jusqu'à 3 km / h.- La hauteur du bord supérieur de l'écran est d'environ 1,5 m (de préférence, avec la possibilité de passer de 1,2 m à 1,8 m).- Combien de kg sont à une hauteur de 180 cm? Tablette + berceau + deux servos. La conception du tricycle sera-t-elle stable avec les batteries sélectionnées le long des côtés lorsque vous heurtez un obstacle de 3,5 cm avec une ou deux roues?Et puis un million de questions sont tombées ... Quelle taille de roues? Quel matériel?
CARACTÉRISTIQUES TECHNIQUES d'un design.- Vitesse maximale jusqu'à 3 km / h.- La hauteur du bord supérieur de l'écran est d'environ 1,5 m (de préférence, avec la possibilité de passer de 1,2 m à 1,8 m).- Combien de kg sont à une hauteur de 180 cm? Tablette + berceau + deux servos. La conception du tricycle sera-t-elle stable avec les batteries sélectionnées le long des côtés lorsque vous heurtez un obstacle de 3,5 cm avec une ou deux roues?Et puis un million de questions sont tombées ... Quelle taille de roues? Quel matériel? Quel type: omni, lisse, avec une bande de roulement profonde?
Quel type: omni, lisse, avec une bande de roulement profonde? Combien de roues: trois ou quatre? Comment planter sur l'arbre?
Combien de roues: trois ou quatre? Comment planter sur l'arbre? Vers la boîte de vitesses ou l'arbre du moteur?
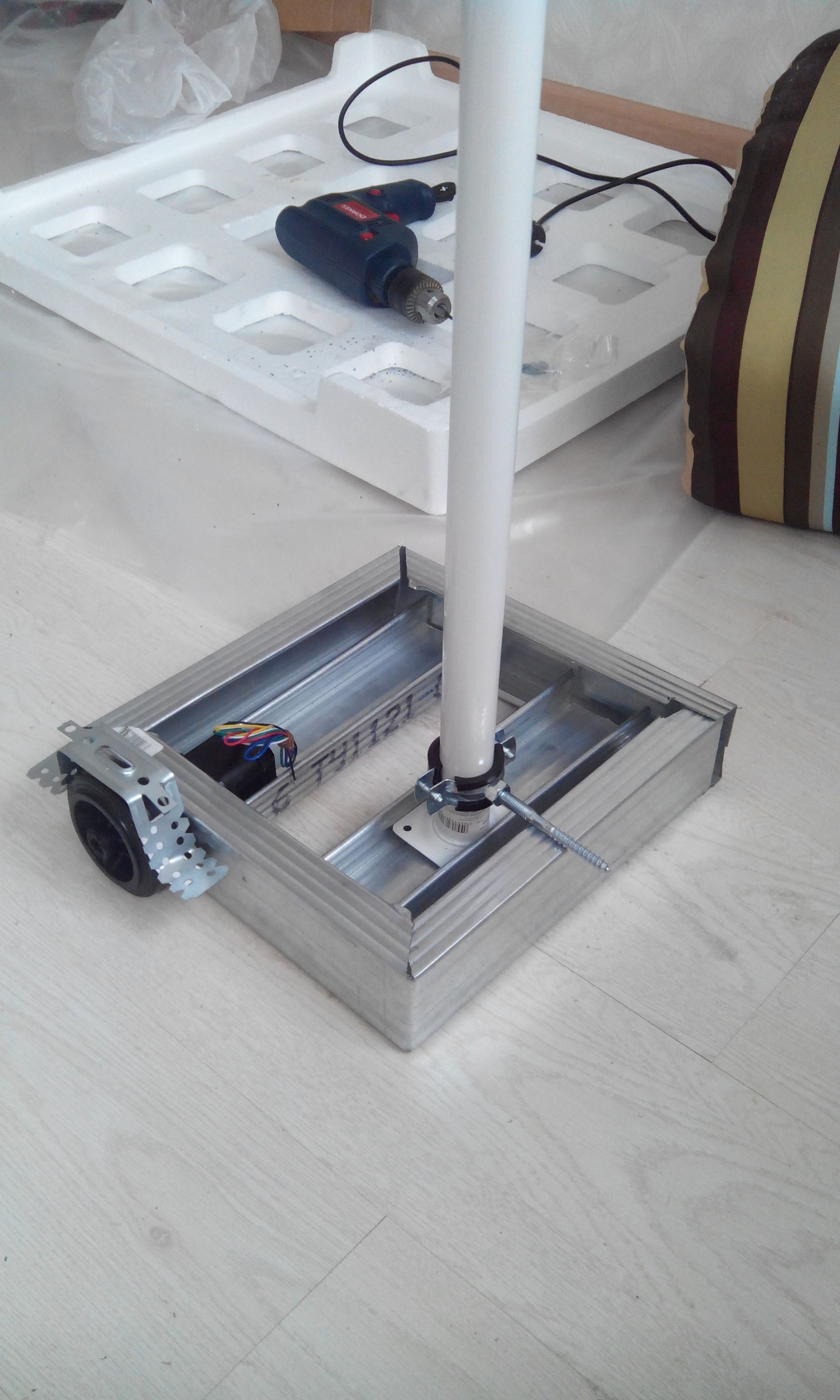
Vers la boîte de vitesses ou l'arbre du moteur? Quel moteur choisir: collecteur, brushless, pas? De quel matériau faire le cadre? En conséquence, j'ai fabriqué le premier prototype de matériaux facilement accessibles vendu dans n'importe quelle quincaillerie: 3 roues (deux principales et une pivotante), un cadre en mince profilé en U en aluminium, des vis et boulons auto-taraudeurs, 2 moteurs pas à pas.
Quel moteur choisir: collecteur, brushless, pas? De quel matériau faire le cadre? En conséquence, j'ai fabriqué le premier prototype de matériaux facilement accessibles vendu dans n'importe quelle quincaillerie: 3 roues (deux principales et une pivotante), un cadre en mince profilé en U en aluminium, des vis et boulons auto-taraudeurs, 2 moteurs pas à pas.
 L'essentiel est que ce prototype remplisse sa mission: servir nos circuits Andrei pour tester l'électronique de haut en bas.Dans cet article, j'ai décrit le tout début de notre long voyage. Produits amateurs et photographies. Mais dans les parties suivantes, je montrerai une approche plus professionnelle:La disposition des éléments de la mécanique et de l'électronique, sur laquelle nous nous sommes concentrés:
L'essentiel est que ce prototype remplisse sa mission: servir nos circuits Andrei pour tester l'électronique de haut en bas.Dans cet article, j'ai décrit le tout début de notre long voyage. Produits amateurs et photographies. Mais dans les parties suivantes, je montrerai une approche plus professionnelle:La disposition des éléments de la mécanique et de l'électronique, sur laquelle nous nous sommes concentrés: Suite de l'article ici: «Suite. Partie 1.2. Comment j'ai assemblé un robot de téléprésence sur un empattement. » Robots d'endurance et technologie des lasers
Suite de l'article ici: «Suite. Partie 1.2. Comment j'ai assemblé un robot de téléprésence sur un empattement. » Robots d'endurance et technologie des lasers Source: https://habr.com/ru/post/fr395507/
All Articles